基于集群AUV数据驱动的亚中尺度涡观测方法
本发明属于亚中尺度涡观测领域,具体涉及一种基于集群auv数据驱动的亚中尺度涡观测方法。
背景技术:
1、亚中尺度涡是指海洋里空间尺度o(1–10)公里、时间尺度o(1–10)天的涡旋,在大洋能量串级和物质输运中扮演重要角色,对海洋生地化过程和海气相互作用等具有重要调控作用,是当前海洋科学的前沿和热点研究领域。目前针对亚中尺度涡旋立体结构与演化过程的跟踪观测手段匮乏,尚未有完整的立体结构数据。
2、申请公布号为【cn107655460a】的发明专利公开一种水下滑翔机的中尺度涡观测方法,首先在水下滑翔机上安装加速度传感器监测水下滑翔机中性悬停时随水体的运动加速度和速度,再通过海表高度异常资料总体判断待测中尺度涡的位置、范围和移动趋势,利用两台滑翔机在中尺度涡移动方向及其法向上做正交路径的剖面观测,进行中尺度涡整体性初测;然后用四台滑翔机分别在中尺度涡的海表面最大流速带处、中心区的不同深度处、最大跃层梯度层的最大流速带处和下均匀层最大流速带处分别中性悬停并做随流观测。另外,申请公布号为【cn113741449a】的发明专利公开一种面向海空协同观测任务的多智能体控制方法,利用单艘无人艇搜寻出中尺度涡内具有观测价值的区域;无人艇从涡流的最外侧沿着直线向中心行驶,艇上搭载的传感器每隔一段时间采集一次水温,并将水温数据由高到底进行排序,得到水温变化梯度大的区域;派出多艘无人艇在以上区域内搜寻等温线,采用数据驱动和深度确定性策略梯度算法对各艘无人艇的航姿继续控制,已确保其行驶在等温线上;派遣无人机前往涡流的中心,采用多智能体深度确定性策略梯度算法控制无人机与各无人艇汇合。
3、但是,由于亚中尺度涡生命周期短,空间尺度较小,演化过程规律难以捉摸,传统的卫星遥感、大型潜/浮标、海洋表面剖面浮标观测方式时空分辨率较低;高频雷达(hfr)虽时空分辨率较高,只能实现海洋表面涡流的观测;水下滑翔机等无人设备虽然能够实现剖面观测,但机动性与自主化水平欠缺,且无法实现亚中尺度涡演化过程的跟踪观测。
4、故而,亟待提出一种新的适用亚中尺度涡的观测方法,以实现面向亚中尺度涡立体结构获取与演化过程的动态跟踪观测,促进对海洋环流过程的理解和建模,揭示亚中尺度涡深层精细结构与机理,特别是其动态演化过程等重大科学规律,为我国开展高分辨率海洋观测、积累丰富观测数据提供先进的观测手段。
技术实现思路
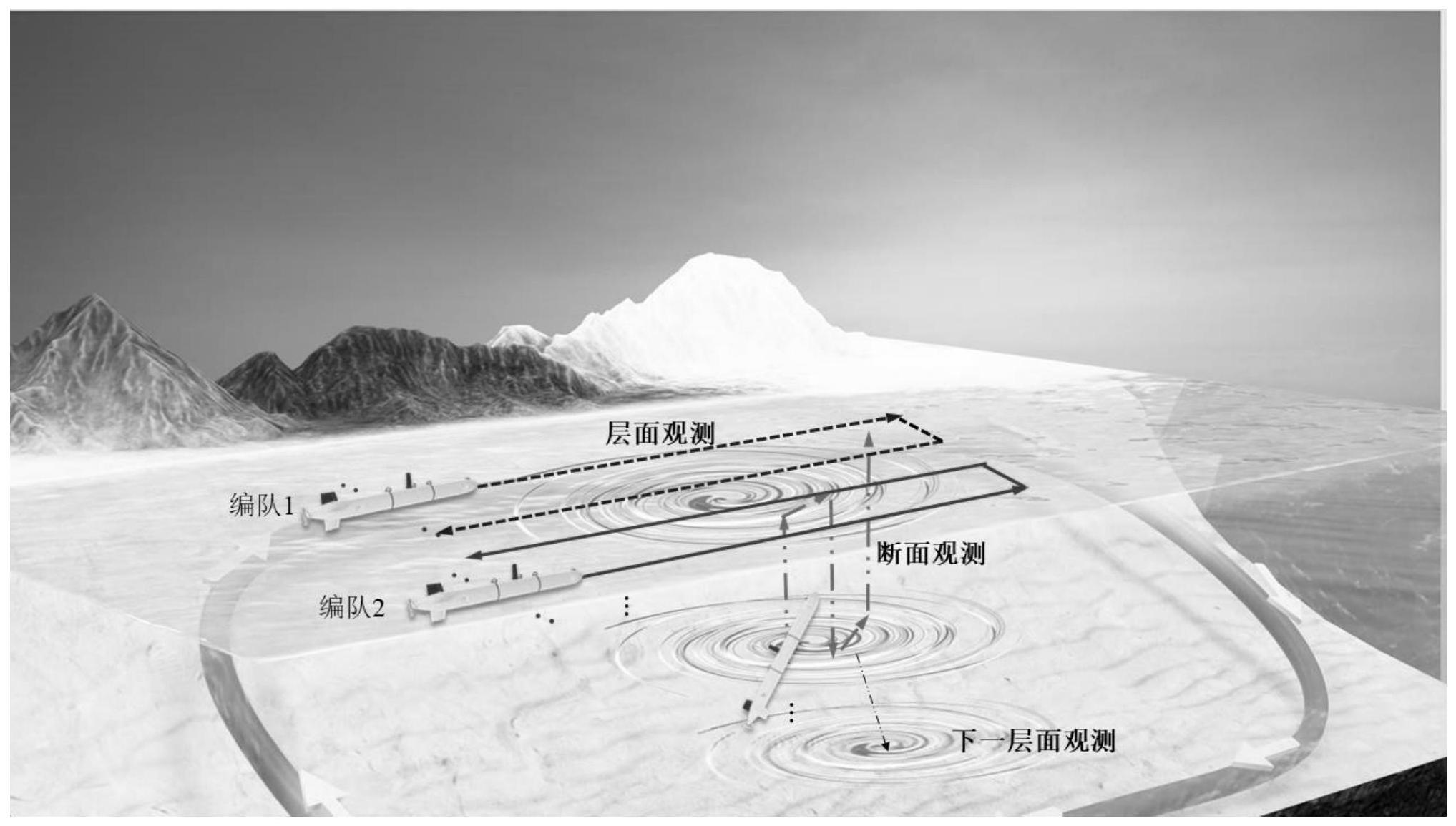
1、本发明针对现有技术中对亚中尺度涡观测存在的缺陷,提出一种基于集群高智慧auv数据驱动的亚中尺度涡观测方法,结合确定层面、断面与多层面观测获取完整的亚中尺度涡立体数据。
2、本发明是采用以下的技术方案实现的:一种基于集群auv数据驱动的亚中尺度涡观测方法,包括以下步骤:
3、步骤a、建立观测区域,获取亚中尺度涡位置,并布放多台auv至指定区域,所述auv上搭载多种不同类型传感器,传感器类型包括但不限于ctd、叶绿素与adcp;
4、步骤b、对多台auv进行编队,基于亚中尺度涡特征分布密集程度与涡边界特征识别结果对亚中尺度涡进行确定层面上的追踪观测;
5、步骤c、根据亚中尺度涡的运动方向进行auv编队断面观测路径规划,实现断面观测;
6、步骤d、结合涡心位置与涡旋运动轨迹预设下一层面的观测路径,采用步骤b的方式,根据亚中尺度涡演化方向对下一层面观测;
7、步骤e、重复步骤b-步骤d直至亚中尺度涡观测完成。
8、进一步的,所述步骤b中,在进行某一确定层面的追踪观测时,具体包括以下步骤:
9、步骤b1、基于观测数据建立高斯回归模型:
10、(1)数据获取:获取亚中尺度涡的边界特征数据的在线识别结果,并基于滑动平均滤波法处理识别结果时间序列;
11、(2)预测模型更新:结合多auv共享自身特征数据的识别结果,根据识别结果更新高斯回归模型;
12、步骤b2、某一确定层面的观测路径规划:基于高斯回归模型预测未观测区域的数据,并计算区域梯度极值,基于任务模式以及梯度极值选择观测方向,并最终确定任务执行状态。
13、进一步的,所述步骤b1中,具体采用以下方式:
14、(1)每条auv对实时获取的多种传感器时序信号(mts)进行同步和关联处理,以数值模拟得出的异常阈值范围作为先验知识,对预处理后的mts进行局部特征和全局特征建模,得到重构时序信息,并基于重构误差检测异常,实现涡边界的在线识别;
15、(2)auv在完成一定时间间隔内的涡旋边界特征数据识别后,将识别结果传输给编队内其他成员;基于自身积累的观测数据识别结果与编队内共享的信息,各auv根据识别结果更新高斯过程回归(gpr)模型。
16、进一步的,所述步骤b1中,auv获取涡边界特征数据的在线识别结果以0或1表示,0代表不是边界,1代表是边界;基于滑动平均滤波法处理识别结果时间序列,依顺序存放n个识别结果,每获取到一个新识别结果,就将最早收到的结果丢掉,而后求解包括新结果在内的n个识别结果的算术平均值,在对应采样点得到的滤波后的边界识别结果平均值记为y,y={y1,y2,…,yn},i=1~n,yi表示第i个边界识别结果。
17、进一步的,所述步骤b2中,具体采用以下方式:
18、(1)auv根据边界识别结果平均值y判定当前处于哪种观测模式,当auv处于模式a或模式b时,按照预设路线进行采样,其中,模式a是指涡旋内部采样观测,模式b是指涡旋边界与外测采样观测;
19、(2)当auv处于模式a切换模式b时,将auv下一个采样点前的运动范围限制在以auv当前位置pi为原点,以rs为半径的半圆区域内,rs=ts·vs,ts是获取识别结果的时间间隔,vs是auv的速度;计算从pi向梯度增加的方向移动到pi+1,根据高斯回归模型获得的观测值的估计计算梯度估计值,确保梯度最大且方向为正,预测观测值最大梯度值对应的位置为规划的路径点;
20、(3)当auv处于模式b切换模式a时,主要的观测任务是在涡旋边界与外侧搜寻观测,此时以预设路径为约束,在涡旋外侧进行数据采样,并在完成数据采样后尽快回到涡旋内部继续观测任务,此时预测观测值最小梯度值对应的位置为规划的路径点,当路径点超出预设路径范围后,auv强制回归预设路径。
21、进一步的,所述步骤d中,完成断面观测后,auv基于多维传感器融合数据的识别结果得到的上一层面的涡心位置,并运用快速搜索基于密度峰值聚类算法提取出上一观测层面亚中尺度涡的形状;
22、结合涡心位置与涡的形状,多auv预测下一待观测层面的涡的结构信息,生成涡的最小外接矩形作为初始观测区域,并按步骤b中的方式生成预设观测路径,进行下一层面的观测。
23、进一步的,所述步骤b2中,当auv处于模式切换时,根据y中元素的变化趋势来判断当前是由模式a切换至模式b还是由模式b切换至模式a,判断方法如下:
24、
25、其中,yi表示第i个边界识别结果,yi-1表示第i-1个边界识别结果,n表示边界数量。
26、进一步的,所述步骤b中,在auv观测过程中,每次路径规划后,都需要判断当前观测处于模式a或模式b;重复步骤b1-b2,直到集群auv完成亚中尺度涡当前确定层面的观测。
27、进一步的,所述步骤b2中:
28、最大梯度计算方法如下:
29、
30、最小梯度计算方法如下:
31、
32、其中,表示基于高斯过程估计的第i+1个路径点处的边界识别结果,△p表示auv位置变化量,在速度确定的情况下可近似于常数rs,max(*)和min(*)分别表示*的最大值和最小值,表示梯度估计值。
33、与现有技术相比,本发明的优点和积极效果在于:
34、本方案基于多auv以协同编队进行亚中尺度涡立体结构与演化过程跟踪观测,auv上搭载ctd、叶绿素与adcp等多种传感器,基于数据驱动对确定层面上亚中尺度涡进行追踪观测,然后进行auv编队断面观测路径规划,再根据亚中尺度涡演化方向,进行下一层面路径规划,结合确定层面、断面与多层面观测,实现对涡旋的整体跟踪观测,获取涡旋的立体结构;
35、本方案能够大力推进亚中尺度过程观测立体化、自动化、智能化以及灵活化,为实现亚中尺度涡精细化监测与识别、演化过程追踪、跟踪观测提供先进的技术方案,实现开展基于auv的海洋亚中尺度涡立体结构与跟踪观测典型应用,揭示亚中尺度动力过程演变机制、营养物质输运过程等重大海洋科学规律。
- 还没有人留言评论。精彩留言会获得点赞!