一种用于硅棒的视觉检测方法与流程
本技术涉及晶硅加工,具体而言,涉及一种用于硅棒的视觉检测方法。
背景技术:
1、光伏行业中,在硅棒制备完成后,需要检测硅棒表面是否存在崩边、缺损等,以将检测不合格的产品选出,减少成品的不良率。
2、目前,主要是通过人工进行硅棒的翻转、检测。而由于硅棒的尺寸越来越大,人工检测的强度也随之增大。同时,人工在翻转、检测的过程中容易操作失误,造成硅棒磕碰损伤。人工检测还存在检测误差较大、效率较低等问题。
技术实现思路
1、本技术实施例的目的在于提供一种用于硅棒的视觉检测方法,以实现硅棒的自动检测的技术效果。
2、本技术实施例提供了一种用于硅棒的视觉检测方法,包括:
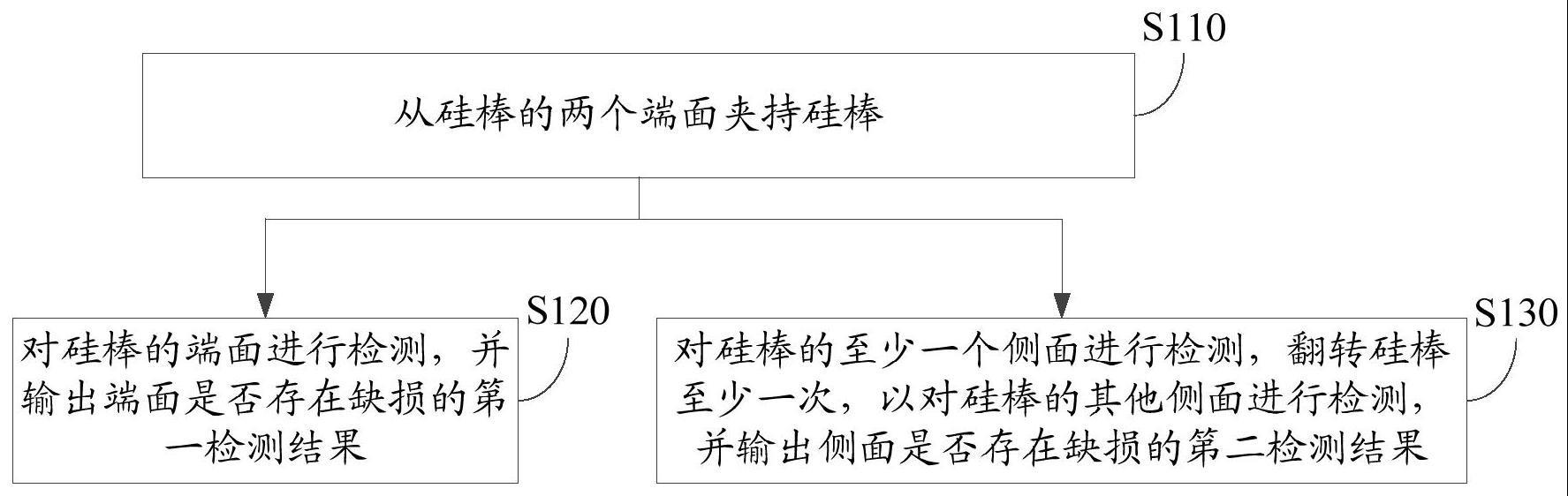
3、从硅棒的两个端面夹持所述硅棒;
4、对所述硅棒的端面进行检测,并输出所述端面是否存在缺损的第一检测结果;
5、对所述硅棒的至少一个侧面进行检测,翻转所述硅棒至少一次,以对所述硅棒的其他侧面进行检测,并输出所述侧面是否存在缺损的第二检测结果。
6、在上述实现过程中,能够检测出硅棒表面是否存在崩边、缺损等,能够辅助选出不合格的产品,从而提高成品的良率。并且,相比人工对硅棒进行检测,本技术中硅棒的自动检测的可靠性更高,检测误差更小,效率更高,能够减少人力资源和成本。
7、进一步地,所述硅棒的侧面包括依次连接的第一侧面、第二侧面、第三侧面和第四侧面;
8、所述“对所述硅棒的至少一个侧面进行检测,翻转所述硅棒至少一次,以对所述硅棒的其他侧面进行检测”包括:
9、对所述硅棒位于检测范围内的第一侧面和第二侧面进行检测,得到第一检测信息;
10、翻转所述硅棒,使得所述硅棒的所述第三侧面和所述第四侧面处于所述检测范围内;
11、对所述第三侧面和所述第四侧面进行检测,得到第二检测信息;
12、根据所述第一检测信息和所述第二检测信息,获取所述第二检测结果。
13、在上述实现过程中,通过对硅棒的第一侧面和第二侧面进行检测,然后翻转硅棒,使得硅棒的第三侧面和第四侧面处于检测范围内,并通过对硅棒的第三侧面和第四侧面进行检测,能够实现对硅棒的四个侧面的全面自动检测,使得检测结果的可靠性较高,准确度较好。
14、进一步地,
15、所述“对所述硅棒位于检测范围内的第一侧面和第二侧面进行检测”包括:
16、沿所述硅棒的长度方向,从所述硅棒的第一端至第二端向所述硅棒发射线激光,以扫描所述第一侧面和所述第二侧面,同时采集扫描所述第一侧面和所述第二侧面形成的第一3d图像,所述第一检测信息包括所述第一3d图像;
17、所述“对所述第三侧面和所述第四侧面进行检测”包括:
18、沿所述硅棒的长度方向,从所述硅棒的第一端至第二端向所述硅棒发射线激光,以扫描所述第三侧面和所述第四侧面,同时采集扫描所述第三侧面和所述第四侧面形成的第二3d图像,所述第二检测信息包括所述第二3d图像。
19、在上述实现过程中,通过向硅棒的侧面发射线激光以对硅棒的侧面进行扫描,通过采集线激光扫描硅棒的侧面形成的3d图像,进而检测出硅棒的侧面是否存在崩边或缺损,并且由于3d检测的方式能够检测出崩边或缺损的深度,能够减少硅棒表面的脏污点、印渍造成误判的可能,从而能够提高检测的准确度。
20、进一步地,所述“对所述硅棒的端面进行检测”包括:
21、分别获取所述硅棒的第一端面的四个顶角的第一2d图像;
22、分别获取所述硅棒的第二端面的四个顶角的第二2d图像。
23、在上述实现过程中,通过对硅棒的端面的四个顶角进行检测,能够使得硅棒的端面的检测精度较高。
24、进一步地,
25、所述“获取所述硅棒的第一端面的四个顶角的第一2d图像”之后包括:
26、根据所述第一2d图像获取第一端面的边长、对角线长度和四个顶角的角度;
27、所述“获取所述硅棒的第二端面的四个顶角的第二2d图像”之后包括:
28、根据所述第二2d图像获取第二端面的边长、对角线长度和四个顶角的角度;
29、根据第一端面的边长、对角线长度和四个顶角的角度,第二端面的边长、对角线长度和四个顶角的角度得到所述第一检测结果。
30、在上述实现过程中,通过第一2d图像获取第一端面的边长、对角线长度和四个顶角的角度,通过第二2d图像获取第二端面的边长、对角线长度和四个顶角的角度,并根据第一端面的边长、对角线长度和四个顶角的角度,第二端面的边长、对角线长度和四个顶角的角度得到第一检测结果,能够进一步使得第一检测结果的准确性更高,可靠性更好。
31、进一步地,
32、在所述“从硅棒的两个端面夹持所述硅棒”之前,所述方法还包括:
33、将所述硅棒沿第一方向运送至输送线上的第一检测位置;
34、使得用于夹持硅棒的夹持机构下降至所述第一检测位置;
35、在所述“从硅棒的两个端面夹持所述硅棒”之后,在所述“对所述硅棒的端面进行检测”之前,所述方法还包括:
36、使得所述夹持机构带动所述硅棒沿所述第二方向上升至第二检测位置,以使得硅棒远离所述输送线,此时所述硅棒的至少一个所述侧面处于检测范围内。
37、在上述实现过程中,通过沿第一方向自动运送硅棒,能够提高视觉检测的智能化和自动化程度。通过沿第二方向自动运送硅棒,以使得硅棒脱离输送线并使得硅棒的至少一个侧面处于检测范围内,能够进一步提高视觉检测的智能化和自动化程度。
38、进一步地,
39、所述“将所述硅棒沿第一方向运送至输送线上的第一检测位置”包括:
40、沿所述第一方向运送所述硅棒;
41、判断是否接收到所述硅棒到达所述第一检测位置的信息;
42、若接收到所述硅棒到达所述第一检测位置的信息,则停止运送所述硅棒;
43、若未接收到所述硅棒到达所述第一检测位置的信息,则继续沿所述第一方向运送所述硅棒。
44、在上述实现过程中,通过判断是否接收到硅棒到达第一检测位置的信息,能够辅助实现对硅棒的自动夹取,进一步提高视觉检测的智能化和自动化程度。
45、进一步地,
46、在所述“对所述硅棒的至少一个侧面进行检测,翻转所述硅棒至少一次,以对所述硅棒的其他侧面进行检测”之后,所述方法还包括:
47、将所述硅棒沿第二方向运送回所述输送线上的所述第一检测位置;
48、使得所述夹持机构与所述硅棒的第二端面脱离;
49、沿所述第一方向的反方向运送所述硅棒,使得所述硅棒的第一端面与所述夹持机构脱离;
50、判断是否接收到所述硅棒到达安全位置的信息;
51、若接收到所述硅棒到达安全位置的信息,则使得所述夹持机构沿所述第二方向上升,并继续沿所述第一方向运送所述硅棒。
52、在上述实现过程中,通过将硅棒运送回第一检测位置后,使得夹持机构与硅棒的第二端面脱离,然后沿第一方向的反方向运送硅棒,使得硅棒的第一端面与夹持机构脱离,能够使得硅棒完全脱离夹持机构,可靠性更高。由于若硅棒未与夹持机构完全脱离时夹持机构就上升,夹持机构容易将硅棒带起,造成硅棒容易产生位移,或硅棒被带起后又下落容易与输送线磕碰造成损伤,因此接收到硅棒到达安全位置的信息后,夹持机构再上升,能够减小硅棒被带起造成位移或损伤的可能。
53、进一步地,
54、在所述“判断是否接收到所述硅棒到达所述第一检测位置的信息”之前,所述方法还包括:
55、判断是否接收到所述硅棒进料到位的信息;
56、若接收到所述硅棒进料到位的信息,则对所述硅棒进行第一次对中;
57、在所述“接收到所述硅棒到达所述第一检测位置的信息”之后,所述方法还包括:
58、对所述硅棒进行第二次对中。
59、在上述实现过程中,在接收到硅棒进料到位的信息时,对硅棒进行第一次对中,使得沿第一方向继续运送硅棒时,硅棒能够沿第一方向移动,不易产生偏移,减小硅棒偏离输送线的可能性。在接收到硅棒到达第一检测位置的信息时,对硅棒进行第二次对中,便于后续夹持机构对硅棒进行夹持,有利于提高夹持机构夹持硅棒的可靠性及硅棒检测的准确性。
60、进一步地,
61、在所述“判断是否接收到所述硅棒进料到位的信息”之前,所述方法还包括:
62、判断是否接收到所述硅棒进料的信息;
63、若接收到所述硅棒进料的信息,则发送所述硅棒的检测程序开始的信号;
64、在所述“接收到所述硅棒到达安全位置的信息”之后,所述方法还包括:
65、判断是否接收到所述硅棒出料的信息;
66、若接收到所述硅棒出料的信息,则发送所述硅棒的检测程序结束的信号。
67、在上述实现过程中,在接收到硅棒进料的信息时,发送硅棒的检测程序开始的信号,在接收到硅棒出料的信息时,发送硅棒的检测程序结束的信号,能够实现对硅棒检测过程的监控和提示,进一步提高视觉检测的智能化和自动化程度。
- 还没有人留言评论。精彩留言会获得点赞!