车辆的无人驾驶定位方法及装置与流程
本技术涉及自动驾驶,特别涉及一种车辆的无人驾驶定位方法及装置。
背景技术:
1、相关技术中,采用gnss(global navigation satellite system,全球导航卫星系统)与imu(inertial measurement unit,惯性测量单元)相结合的多传感器信心融合定位技术,通过感知周围环境,实现复杂环境下的实时定位。
2、然而,相关技术中采用gnss与imu相结合的方式,在信号较弱时无法及时纠正运动误差,导致定位信息出现偏差或跳变,定位的精确性较低,降低了车辆的安全性,并且降低用户的驾乘体验,无法满足用户的驾乘需求。
技术实现思路
1、本技术是基于发明人对以下问题和认识作出的:
2、无人驾驶车行驶在道路上的必备条件之一便是知晓自身的位姿以及目标位姿,因此需要通过传感器来感知周围的环境,实现在环境中的实时定位,常用于定位的传感器有全球导航卫星系统gnss、激光雷达和imu惯性测量传感器,单一的传感器都有局限性,多传感器信息融合定位技术克服了单一传感器存在的信息量少、及时性和鲁棒性差等问题,从而有效的提高了复杂环境下定位感知的准确性和可行性,因此多传感器信息融合定位技术是当前无人驾驶领域具有研究前景的技术领域。
3、gnss全球导航卫星系统与imu惯性导航结合,惯性导航可以弥补gnss更新频率低的缺陷,gnss可以纠正惯性导航的运动误差,但是,如果是在地下隧道或者其他信号不好的地方,gnss可能无法及时纠正惯性导航的运动误差,此时的gnss定位信息已经出现偏差或者跳变,若不能及时检测到gnss数据的偏差,很容易引发事故,亟待改进。
4、本技术提供一种车辆的无人驾驶定位方法及装置,以解决相关技术中采用gnss与imu相结合的方式,在信号较弱时无法及时纠正运动误差,导致定位信息出现偏差或跳变,定位的精确性较低,降低了车辆的安全性,并且降低用户的驾乘体验,无法满足用户的驾乘需求的问题。
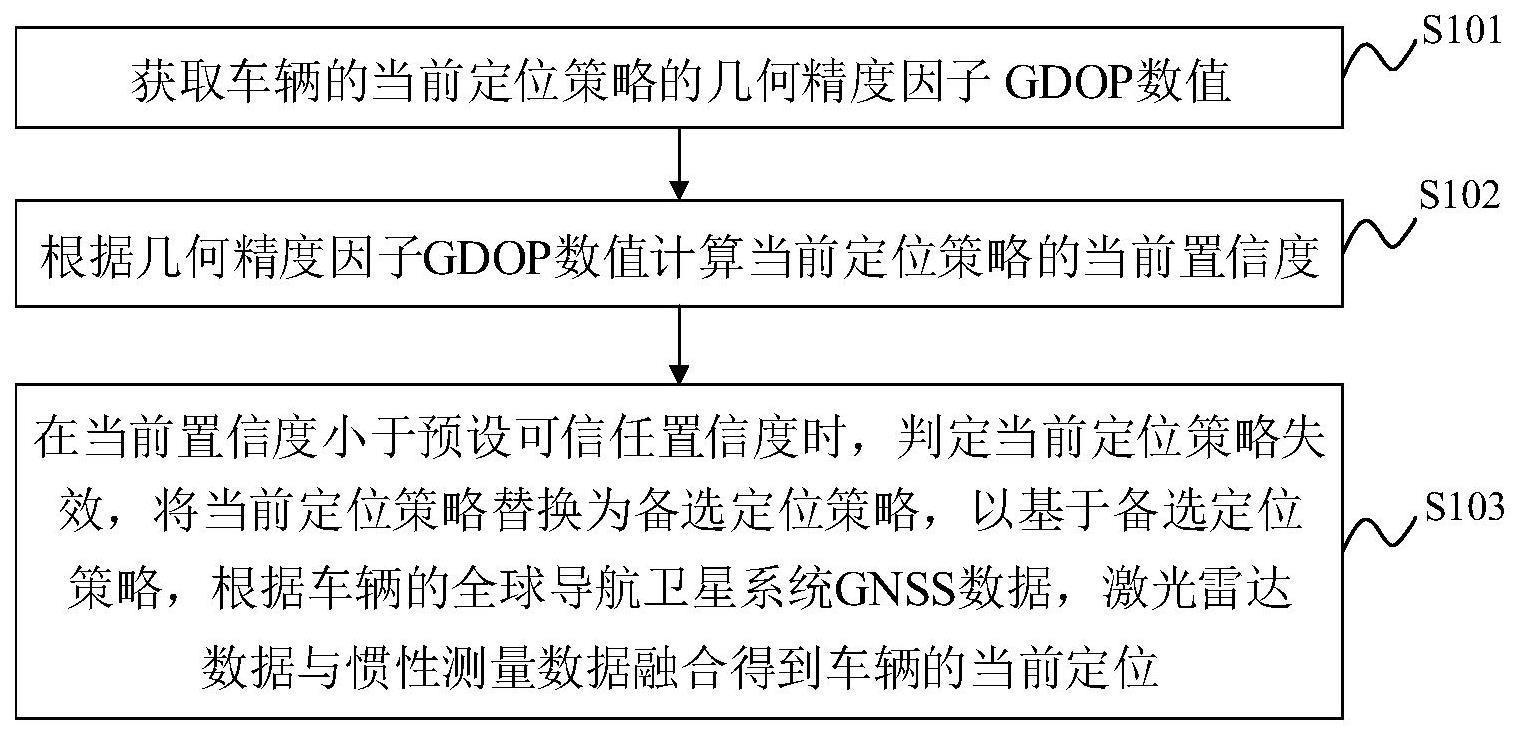
5、本技术第一方面实施例提供一种车辆的无人驾驶定位方法,包括以下步骤:获取车辆的当前定位策略的几何精度因子gdop数值;根据所述几何精度因子gdop数值计算所述当前定位策略的当前置信度;在所述当前置信度小于预设可信任置信度时,判定所述当前定位策略失效,将所述当前定位策略替换为备选定位策略,以基于所述备选定位策略,根据所述车辆的全球导航卫星系统gnss数据,激光雷达数据与惯性测量数据融合得到所述车辆的当前定位。
6、可选地,在本技术的一个实施例中,所述根据所述车辆的全球导航卫星系统gnss数据,激光雷达数据与惯性测量数据融合得到所述车辆的当前定位,包括:基于扩展卡尔曼滤波方式,融合并输出预设坐标系下的全局定位信息;将所述全局定位信息通过坐标变换到地图坐标系下,得到所述车辆的初始位姿信息。
7、可选地,在本技术的一个实施例中,在得到所述当前定位之前,还包括:根据由所述初始位姿信息得到的至少一个关键帧构建点云地图;根据激光雷达扫描数据平移和旋转增量提取关键帧数据;根据所述关键帧数据提取至少一个点面特征,分别对每个点面特征进行位姿匹配,获取关键帧位姿信息;根据所述关键帧位姿信息将点云数据插入地图中,生成点云场景地图。
8、可选地,在本技术的一个实施例中,所述根据所述车辆的全球导航卫星系统gnss数据,激光雷达数据与惯性测量数据融合得到所述车辆的当前定位,还包括:根据所述点云数据和所述点云场景地图之间的匹配结果,得到所述当前定位。
9、可选地,在本技术的一个实施例中,在将所述当前定位策略替换为所述备选定位策略之前,还包括:获取所述点云数据和所述点云场景地图中对应点的欧式距离残差;根据所述欧式距离残差计算所述备选定位策略的置信度;在所述置信度大于或等于所述当前置信度时,允许替换为所述备选定位策略。
10、可选地,在本技术的一个实施例中,在计算所述备选定位策略的置信度之后,还包括:在所述置信度小于所述当前置信度时,禁止替换为所述备选定位策略并依旧采用所述当前定位策略的同时,进行置信度过低提醒。
11、可选地,在本技术的一个实施例中,在进行置信度过低提醒之前,还包括:判断所述当前置信度是否小于预设不可信任置信度;如果所述当前置信度小于所述预设不可信任置信度,则进行无法定位提示。
12、本技术第二方面实施例提供一种车辆的无人驾驶定位装置,包括:获取模块,用于获取车辆的当前定位策略的几何精度因子gdop数值;计算模块,用于根据所述几何精度因子gdop数值计算所述当前定位策略的当前置信度;处理模块,用于在所述当前置信度小于预设可信任置信度时,判定所述当前定位策略失效,将所述当前定位策略替换为备选定位策略,以基于所述备选定位策略,根据所述车辆的全球导航卫星系统gnss数据,激光雷达数据与惯性测量数据融合得到所述车辆的当前定位。
13、可选地,在本技术的一个实施例中,所述处理模块包括:输出单元,用于基于扩展卡尔曼滤波方式,融合并输出预设坐标系下的全局定位信息;获取单元,用于将所述全局定位信息通过坐标变换到地图坐标系下,得到所述车辆的初始位姿信息。
14、可选地,在本技术的一个实施例中,还包括:确定模块,用于在得到所述当前定位之前,根据由所述初始位姿信息得到的至少一个关键帧构建点云地图;第一提取模块,用于在得到所述当前定位之前,根据所述激光雷达扫描数据平移和旋转增量提取关键帧数据;第二提取模块,用于在得到所述当前定位之前,根据所述关键帧数据提取至少一个点面特征,分别对每个点面特征进行位姿匹配,获取关键帧位姿信息;生成模块,用于在得到所述当前定位之前,根据所述关键帧位姿信息将点云数据插入地图中,生成点云场景地图。
15、可选地,在本技术的一个实施例中,所述处理模块包括:获取单元,用于根据所述点云数据和所述点云场景地图之间的匹配结果,得到所述当前定位。
16、可选地,在本技术的一个实施例中,还包括:获取模块,用于在将所述当前定位策略替换为所述备选定位策略之前,获取所述点云数据和所述点云场景地图中对应点的欧式距离残差;计算模块,用于在将所述当前定位策略替换为所述备选定位策略之前,根据所述欧式距离残差计算所述备选定位策略的置信度;替换模块,用于在将所述当前定位策略替换为所述备选定位策略之前,在所述置信度大于或等于所述当前置信度时,允许替换为所述备选定位策略。
17、可选地,在本技术的一个实施例中,还包括:控制模块,用于在计算所述备选定位策略的置信度之后,在所述置信度小于所述当前置信度时,禁止替换为所述备选定位策略并依旧采用所述当前定位策略的同时,进行置信度过低提醒。
18、可选地,在本技术的一个实施例中,还包括:判断模块,用于在进行置信度过低提醒之前,判断所述当前置信度是否小于预设不可信任置信度;处理模块,用于在进行置信度过低提醒之前,如果所述当前置信度小于所述预设不可信任置信度,则进行无法定位提示。
19、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆的无人驾驶定位方法。
20、本技术第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的车辆的无人驾驶定位方法。
21、本技术实施例可以获取车辆的当前定位策略的gdop数值,从而计算当前定位策略的当前置信度,在当前置信度小于可信任置信度时,将当前定位策略替换为备选定位策略,以基于备选定位策略,根据车辆的gnss数据,激光雷达数据与惯性测量数据融合得到车辆的当前定位,有效的提升了定位的精确性,提高车辆的安全性,满足用户的驾乘体验。由此,解决了相关技术中采用gnss与imu相结合的方式,在信号较弱时无法及时纠正运动误差,导致定位信息出现偏差或跳变,定位的精确性较低,降低了车辆的安全性,并且降低用户的驾乘体验,无法满足用户的驾乘需求的问题。
22、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!