标定数据采集方法、装置、设备及存储介质与流程
本发明涉及自动驾驶领域,尤其涉及一种标定数据采集方法、装置、设备及存储介质。
背景技术:
1、目前随着汽车自动化技术的发展,汽车传感器(如相机、雷达、激光雷达等)在自动驾驶中扮演着至关重要的角色。而对于传感器的标定精度和效率的要求也越来越高。对于车辆新安装的传感器套件,通常需要进行复杂的标定程序,以获得相机的内部参数及外部参数。为了让全车传感器能够取得360度全方位的标定信息,当前的标定方法通常将标定板固定在地面上不动,通过加装大型机械转盘来让车辆旋转,从而获取全方位的标定信息。尽管这种方式标定精准度更高,但是成本较高,同时标定过程也需要相当长的时间,且标定过程固定无法适应不同的标定模式或标定车辆。
技术实现思路
1、本发明的主要目的在于解决现有标定数据采集方法中操作复杂、标定模式单一的技术问题。
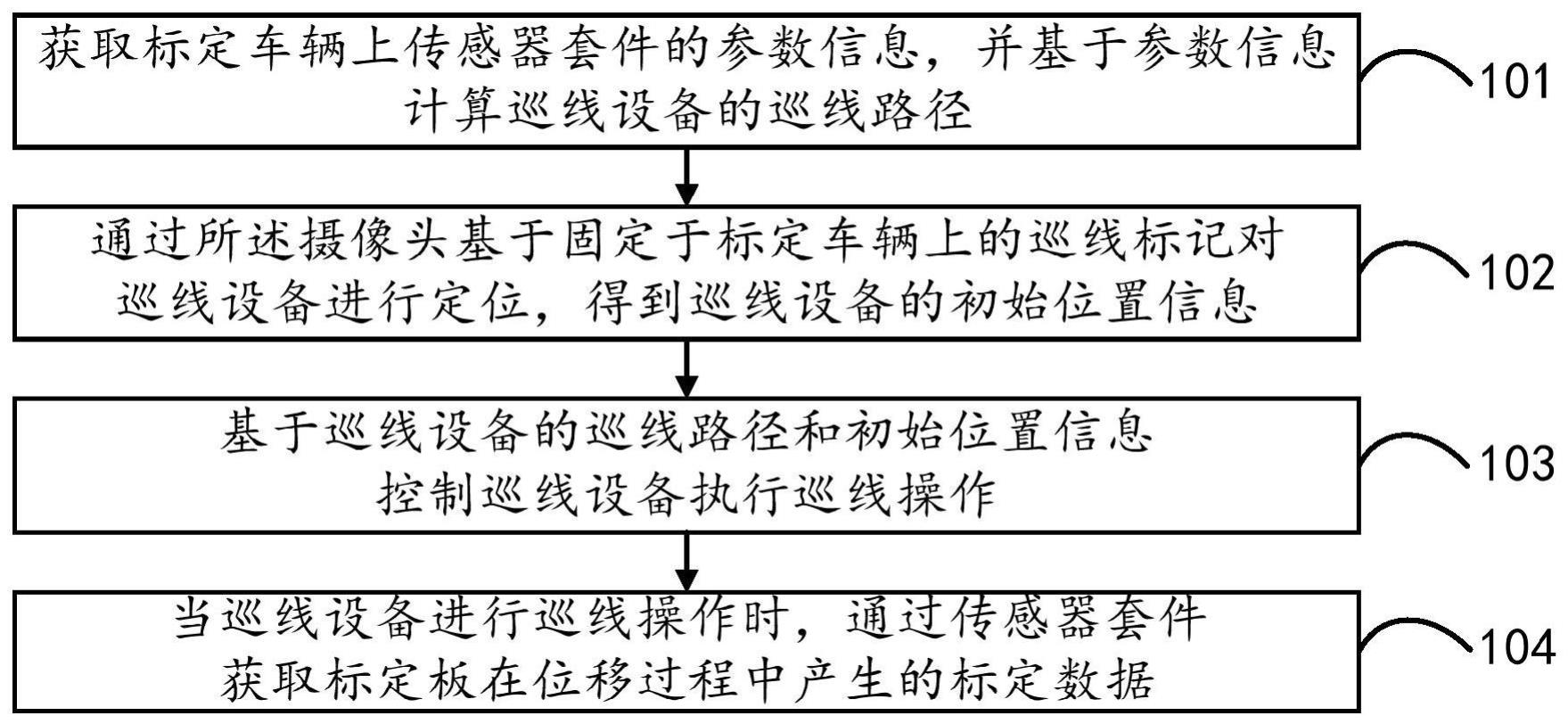
2、本发明第一方面提供了一种标定数据采集方法,所述标定数据采集方法,包括:获取标定车辆上传感器套件的参数信息,并基于所述参数信息计算所述巡线设备的巡线路径;通过所述摄像头基于固定于所述标定车辆上的巡线标记对所述巡线设备进行定位,得到所述巡线设备的初始位置信息;基于所述巡线设备的巡线路径和初始位置信息控制所述巡线设备执行巡线操作;当所述巡线设备进行巡线操作时,通过所述传感器套件获取所述标定板在位移过程中产生的标定数据。
3、可选的,在本发明第一方面的第一种实现方式中,所述获取标定车辆上传感器套件的参数信息,并基于所述参数信息计算所述巡线设备的巡线路径,包括:获取标定车辆上传感器套件的参数信息,通过所述参数信息计算标定板的展示距离和展示角度;根据所述展示距离和所述展示角度,计算得到所述标定板的运动轨迹;通过所述运动轨迹,确定所述巡线设备的巡线路径。
4、可选的,在本发明第一方面的第二种实现方式中,所述初始位置信息包括初始空间位置和初始角度,在所述通过所述摄像头基于固定于所述标定车辆上的巡线标记对所述巡线设备进行定位,得到所述巡线设备的初始位置信息之后,还包括:判断所述初始空间位置是否位于所述巡线路径的起点;若否,则基于所述初始空间位置和所述巡线路径的起点生成校正路径;控制所述巡线设备基于所述校正路径运动至所述巡线路径的起点;判断所述初始角度是否与所述巡线路径的预设角度相同;若否,则控制所述巡线设备基于所述巡线标记旋转至预设角度。
5、可选的,在本发明第一方面的第三种实现方式中,在所述基于所述巡线设备的巡线路径和初始位置信息控制所述巡线设备执行巡线操作之后,包括:当所述巡线设备执行巡线操作时,通过所述摄像头追踪所述巡线标记并拍摄,得到包含所述巡线标记的定位图像;提取所述定位图像中的所述巡线标记的平面位置;基于所述平面位置校准所述巡线设备执行巡线操作时所述标定板的展示角度。
6、可选的,在本发明第一方面的第四种实现方式中,在所述当所述巡线设备进行巡线操作时,通过所述传感器套件获取所述标定板在位移过程中产生的标定数据之后,还包括:对所述标定数据进行解析,得到若干包含标定板的待处理图像;基于所述标定板的标定板信息对所述待处理图像执行去畸变操作,得到标定图像,其中,所述标定图像中存在若干像素,若干所述像素存在对应的平面坐标;根据所述标定图像中所述标定板的标定板信息将所述标定图像中若干像素的平面坐标转换至预设的世界坐标系,得到标定结果。
7、可选的,在本发明第一方面的第五种实现方式中,所述标定数据还包括对应于若干所述待处理图像的点云数据集合,所述点云数据集合包含若干点云数据,所述若干像素包括所述标定板信息中2d中心点的像素;所述根据所述标定图像中所述标定板的标定板信息将所述标定图像中若干像素的平面坐标转换至预设的世界坐标系,得到标定结果,包括:根据所述标定图像中所述标定板的标定板信息,获取所述标定板信息中2d中心点的像素的中心平面坐标;基于所述世界坐标系定位各所述点云数据中所述标定信息的3d中心点,并获取所述3d中心点的中心空间坐标;基于所述中心平面坐标和所述中心空间坐标,计算并得到转换参数,并以所述转换参数作为标定结果。
8、可选的,在本发明第一方面的第六种实现方式中,在所述根据所述标定图像中所述标定板的标定板信息将所述标定图像中若干像素的平面坐标转换至预设的世界坐标系,得到标定结果之后,还包括:基于所述参数信息确定所述巡线设备的第二巡线路径;控制所述巡线设备基于所述第二巡线路径执行巡线操作,并在得到第二标定数据后处理成第二标定图像和第二点云数据集合;基于所述标定结果分别对所述第二标定图像和所述第二点云数据集合进行计算,得到所述标定板的计算轨迹;判断所述计算轨迹是否与所述第二巡线路径重合;若是,则完成对所述标定结果的验证流程。
9、本发明第二方面提供了一种标定数据采集装置所述标定数据采集装置,包括:巡线路径计算模块,用于获取标定车辆上传感器套件的参数信息,并基于所述参数信息计算所述巡线设备的巡线路径;定位模块,用于通过所述摄像头基于固定于所述标定车辆上的巡线标记对所述巡线设备进行定位,得到所述巡线设备的初始位置信息;巡线操作控制模块,用于基于所述巡线设备的巡线路径和初始位置信息控制所述巡线设备执行巡线操作;标定数据获取模块,用于当所述巡线设备进行巡线操作时,通过所述传感器套件获取所述标定板在位移过程中产生的标定数据。
10、可选的,在本发明第二方面的第一种实现方式中,所述巡线路径计算模块具体用于:获取标定车辆上传感器套件的参数信息,通过所述参数信息计算标定板的展示距离和展示角度;根据所述展示距离和所述展示角度,计算得到所述标定板的运动轨迹;通过所述运动轨迹,确定所述巡线设备的巡线路径。
11、可选的,在本发明第二方面的第二种实现方式中,所述标定数据采集装置还包括设备校正模块,所述设备校正模块具体用于:判断所述初始空间位置是否位于所述巡线路径的起点;若否,则基于所述初始空间位置和所述巡线路径的起点生成校正路径;控制所述巡线设备基于所述校正路径运动至所述巡线路径的起点;判断所述初始角度是否与所述巡线路径的预设角度相同;若否,则控制所述巡线设备基于所述巡线标记旋转至预设角度。
12、可选的,在本发明第二方面的第三种实现方式中,所述标定数据采集装置还包括角度调整模块,所述角度调整模块具体用于:当所述巡线设备执行巡线操作时,通过所述摄像头追踪所述巡线标记并拍摄,得到包含所述巡线标记的定位图像;提取所述定位图像中的所述巡线标记的平面位置;基于所述平面位置校准所述巡线设备执行巡线操作时所述标定板的展示角度。
13、可选的,在本发明第二方面的第四种实现方式中,所述标定数据采集装置还包括标定数据解析模块,所述标定数据解析模块具体用于:标定数据解析单元,对所述标定数据进行解析,得到若干包含标定板的待处理图像;去畸变单元,基于所述标定板的标定板信息对所述待处理图像执行去畸变操作,得到标定图像,其中,所述标定图像中存在若干像素,若干所述像素存在对应的平面坐标;坐标系转换单元,根据所述标定图像中所述标定板的标定板信息将所述标定图像中若干像素的平面坐标转换至预设的世界坐标系,得到标定结果。
14、可选的,在本发明第二方面的第五种实现方式中,所述坐标系转换单元具体用于:根据所述标定图像中所述标定板的标定板信息,获取所述标定板信息中2d中心点的像素的中心平面坐标;基于所述世界坐标系定位各所述点云数据中所述标定信息的3d中心点,并获取所述3d中心点的中心空间坐标;基于所述中心平面坐标和所述中心空间坐标,计算并得到转换参数,并以所述转换参数作为标定结果。
15、可选的,在本发明第二方面的第六种实现方式中,所述标定数据采集装置还包括验证模块,所述验证模块具体用于:基于所述参数信息确定所述巡线设备的第二巡线路径;控制所述巡线设备基于所述第二巡线路径执行巡线操作,并在得到第二标定数据后处理成第二标定图像和第二点云数据集合;基于所述标定结果分别对所述第二标定图像和所述第二点云数据集合进行计算,得到所述标定板的计算轨迹;判断所述计算轨迹是否与所述第二巡线路径重合;若是,则完成对所述标定结果的验证流程。
16、本发明第三方面提供了一种标定数据采集设备,包括:存储器和至少一个处理器,所述存储器中存储有请求,所述存储器和所述至少一个处理器通过线路互连;所述至少一个处理器调用所述存储器中的所述请求,以使得所述标定数据采集设备执行上述的标定数据采集方法的步骤。
17、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有请求,当其在计算机上运行时,使得计算机执行上述的标定数据采集方法的步骤。
18、本发明的技术方案中,通过获取标定车辆上传感器套件的参数信息,并基于所述参数信息计算所述巡线设备的巡线路径,其中,所述巡线设备上安装有摄像头和标定板;通过所述摄像头基于固定于所述标定车辆上的巡线标记对所述巡线设备进行定位,得到所述巡线设备的初始位置信息;基于所述巡线设备的巡线路径和初始位置信息控制所述巡线设备执行巡线操作;当所述巡线设备进行巡线操作时,通过所述传感器套件获取所述标定板在位移过程中产生的标定数据。本技术基于传感器套件参数信息确定巡线路径,实现全自动标定,提高标定精度;通过对标定板位移过程中产生的标定数据进行处理,为后续的智能驾驶技术提供更加准确的数据支持。
- 还没有人留言评论。精彩留言会获得点赞!