基于时延差和到达时间差的目标定位方法
本发明涉及一种目标定位技术,尤其是涉及一种未知发射机位置时基于时延差和到达时间差的目标定位方法。
背景技术:
1、近年来,通过无线网络进行的目标定位在军事、航空和自动驾驶等许多领域中的广泛应用而引起了广泛关注。几十年来,通过时间测量的定位,包括到达时间(time ofarrival,toa)、时延差(differential time delay,dtd)和到达时间差(time differenceof arrival,tdoa),与诸如到达角(angle of arrival,aoa)或接收信号强度(receivedsignal strength,rss)的其他测量值相比有着较高的定位精度,已经受到相当大的关注。
2、当基于以上任何一种时间测量值对目标进行定位时都达不到理想的定位精度,那么可以将两种以上的时间测量值结合起来对目标进行定位,以取得更满意的目标定位结果。在实际中混合测量值是一个重点的研究领域,基于混合测量值的目标定位精度更好,也可以降低对单一测量值的依赖。
3、此外,在实际场景中,发射机可能位于gps无法到达以确定其位置的地方,又或是发射机位置不可用无源雷达。当发射机位置未知时,进行目标定位更加困难。因此,联合估计目标和发射机的位置十分必要。
4、现有的基于时延差和到达时间差的目标定位方法采用的是闭式解的方法,来联合估计目标和发射机的位置,但是该方法在噪声水平增加时可能更早的偏离最佳性能,因此需要一种对噪声更鲁棒的定位方法。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于时延差和到达时间差的目标定位方法,其在发射机位置未知的情况下,能够联合估计目标和发射机的位置,且定位精度高。
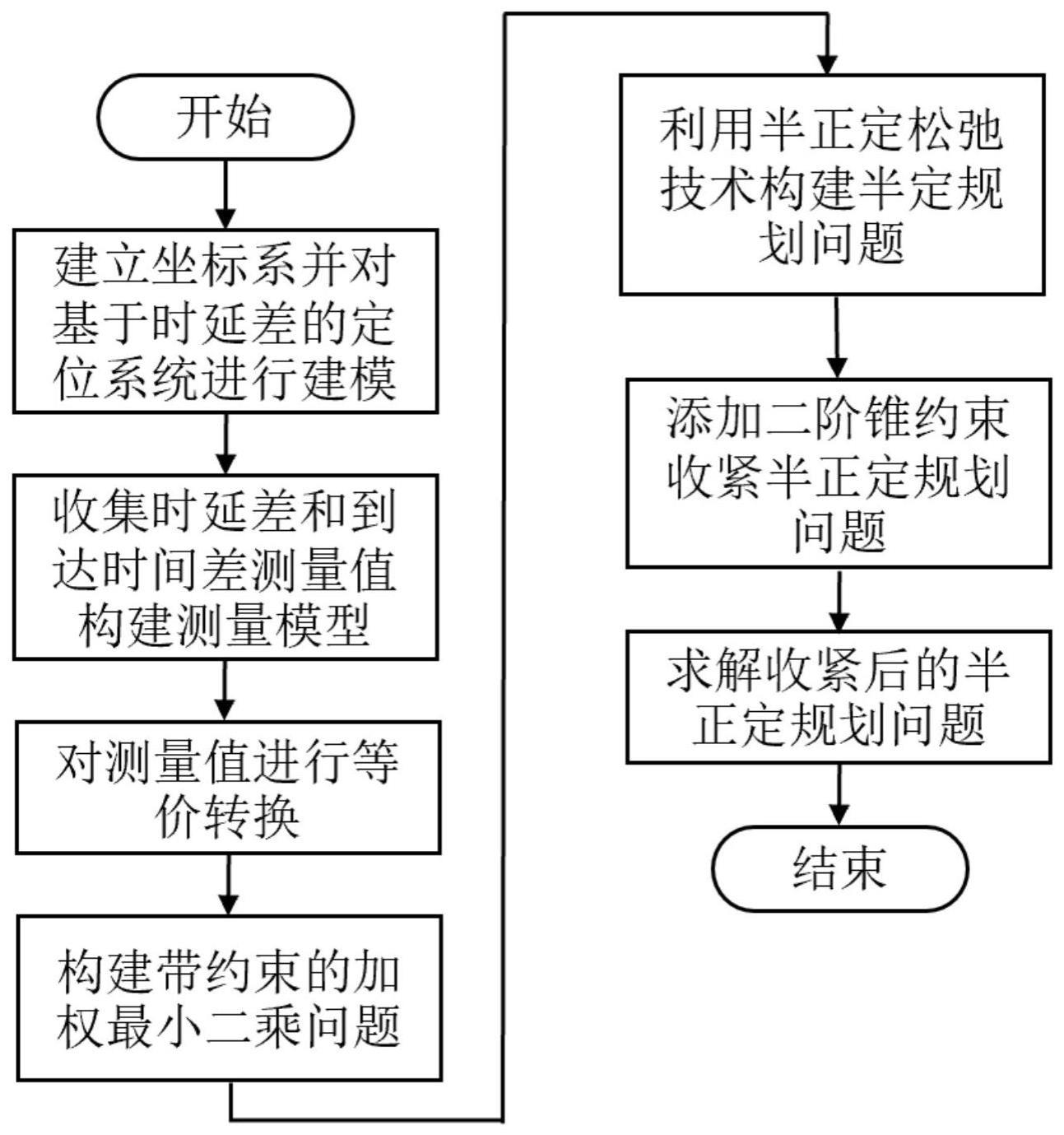
2、本发明解决上述技术问题所采用的技术方案为:一种基于时延差和到达时间差的目标定位方法,其特征在于包括以下步骤:
3、步骤1:在无线传感网络定位场景中,建立一个三维坐标系作为参考坐标系,并设定存在m个已知真实坐标位置的传感器、一个未知真实坐标位置的发射机以及一个未知真实坐标位置的目标,设定传感器间不存在时钟同步,将第i个传感器在参考坐标系中的真实坐标位置记为si,将目标在参考坐标系中的真实坐标位置记为uo,将发射机在参考坐标系中的真实坐标位置记为to,其中,m≥2,1≤i≤m,表示si的横坐标,表示si的纵坐标,表示si的竖坐标,表示uo的横坐标,表示uo的纵坐标,表示uo的竖坐标,表示to的横坐标,表示to的纵坐标,表示to的竖坐标,上标“t”表示向量或矩阵的转置;
4、步骤2:根据所有传感器各自接收到的时延差信息乘已知的信号传播速度,构建dtd距离测量模型,描述为:并根据所有传感器各自接收到的到达时间差信息乘已知的信号传播速度,构建tdoa距离测量模型,描述为:其中,di表示发射机广播的信号到达第i个传感器时受测量噪声污染的dtd距离测量值,表示发射机广播的信号到达第i个传感器时不受测量噪声污染的dtd距离测量值,εi表示发射机广播的信号被第i个传感器接收的路径上的dtd测量噪声,符号“|| ||”为二范数符号,||uo-si||表示目标到第i个传感器的真实距离,||uo-to||表示目标到发射机的真实距离,||to-si||表示发射机到第i个传感器的真实距离,rj表示发射机广播的信号到达第j个传感器和第1个传感器时受测量噪声污染的tdoa距离测量值,表示发射机广播的信号到达第j个传感器和第1个传感器时不受测量噪声污染的tdoa距离测量值,ηj表示发射机广播的信号被第j个传感器和第1个传感器接收的路径上的tdoa测量噪声,||uo-sj||表示目标到第j个传感器的真实距离,||uo-s1||表示目标到第1个传感器的真实距离,sj表示第j个传感器在参考坐标系中的真实坐标位置,s1表示第1个传感器在参考坐标系中的真实坐标位置;
5、步骤3:将步骤2中构建的dtd距离测量模型转变为然后结合和步骤2中构建的tdoa距离测量模型rj=||uo-sj||-||uo-s1||+ηj,j=2,...,m,得到d1-dj+rj=||to-sj||-||to-s1||+ε1-εj+ηj,j=2,…,m;再将d1-dj+rj=||to-sj||-||to-s1||+ε1-εj+ηj,j=2,…,m中的||to-s1||移到等式左边并左右两边同时平方,得到进而忽略二阶噪声项(ε1-εj+ηj)2,得到其中,d1表示发射机广播的信号到达第1个传感器时受测量噪声污染的dtd距离测量值,dj表示发射机广播的信号到达第j个传感器时受测量噪声污染的dtd距离测量值,ε1表示发射机广播的信号被第1个传感器接收的路径上的dtd测量噪声,εj表示发射机广播的信号被第j个传感器接收的路径上的dtd测量噪声;
6、将d1=||uo-s1||+||uo-to||-||to-s1||+ε1移项得到ε1=d1-||uo-s1||-||uo-to||+||to-s1||;
7、将rj=||uo-sj||-||uo-s1||+ηj,j=2,…,m中的||uo-s1||移到等式左边并左右两边同时平方,得到进而忽略二阶噪声项得到
8、步骤4:根据步骤3得到的ε1=d1-||uo-s1||-||uo-to||+||to-s1||,以及构建约束加权最小二乘问题,描述为:
9、
10、其中,min为最小化函数,s.t.表示“受约束于……”,()-1表示矩阵的逆,y为优化变量,且y=[ut,tt,||u-s1||,||t-s1||,||u-t||]t,u表示目标的位置变量,表示u的横坐标,表示u的纵坐标,表示u的竖坐标,t表示发射机的位置变量,表示t的横坐标,表示t的纵坐标,表示t的竖坐标,(h-gy)tw(h-gy)为约束加权最小二乘问题的目标函数,h为引入的系数向量,g为引入的系数矩阵,d2表示发射机广播的信号到达第2个传感器时受测量噪声污染的dtd距离测量值,dm表示发射机广播的信号到达第m个传感器时受测量噪声污染的dtd距离测量值,r2表示发射机广播的信号到达第2个传感器和第1个传感器时受测量噪声污染的tdoa距离测量值,rm表示发射机广播的信号到达第m个传感器和第1个传感器时受测量噪声污染的tdoa距离测量值,s2表示第2个传感器在参考坐标系中的真实坐标位置,sm表示第m个传感器在参考坐标系中的真实坐标位置,01×3表示维数为1×3的全0向量,w为引入的权重矩阵,w=e[bjn(bjn)t]-1=(bjqjtbt)-1,e[]表示求数学期望,b为引入的系数矩阵,b为对角元素为[1,2||to-s2||,…,2||to-sm||,2||uo-s2||,…,2||uo-sm||]的对角矩阵,j为引入的系数矩阵,01×(m-1)表示维数为1×(m-1)的全0向量,0(m-1)×1表示维数为(m-1)×1的全0向量,0(m-1)×m表示维数为(m-1)×m的全0矩阵,1(m-1)×1表示维数为(m-1)×1的全1向量,im-1表示m-1阶单位矩阵,n表示测量噪声向量,n=[εt,ηt]t,ε=[ε1,...,εm]t,εm表示发射机广播的信号被第m个传感器接收的路径上的dtd测量噪声,ε服从均值为0且协方差矩阵为qd的高斯分布,qd表示ε的协方差矩阵,η=[η2,...,ηm]t,η2表示发射机广播的信号被第2个传感器和第1个传感器接收的路径上的tdoa测量噪声,ηm表示发射机广播的信号被第m个传感器和第1个传感器接收的路径上的tdoa测量噪声,η服从均值为0且协方差矩阵为qr的高斯分布,qr表示η的协方差矩阵,q=blkdiag{qd,qr},blkdiag{qd,qr}表示将qd和qr放在主对角线上组成一个块对角矩阵,y(7)、y(8)、y(9)分别对应表示y中的第7个元素、第8个元素、第9个元素,y(1:3)表示由y中的第1个元素至第3个元素组成的子向量,y(4:6)表示由y中的第4个元素至第6个元素组成的子向量;
11、步骤5:在步骤4中构建的约束加权最小二乘问题中引入新的辅助矩阵变量y,y=yyt;然后将y=yyt等价于rank(y)=1,y≥0;再利用半正定松弛技术对非凸约束rank(y)=1松弛,进而将约束加权最小二乘问题转化成一个凸的半正定规划问题,描述为:
12、
13、其中,rank()表示求取矩阵的秩,y≥0表示y是半正定的,tr()表示矩阵元素的取迹操作,tr(gtwgy)-2htwgy+htwh为凸的半正定规划问题的目标函数,y和y均为凸的半正定规划问题的优化变量,y(7,7)、y(8,8)、y(9,9)分别对应表示y中的第7行第7列元素、第8行第8列元素、第9行第9列元素,y(1:3,1:3)表示由y中第1行到第3行与第1列到第3列构成的子矩阵,y(4:6,4:6)表示由y中第4行到第6行与第4列到第6列构成的子矩阵,y(1:6,1:6)表示由y中第1行到第6行与第1列到第6列构成的子矩阵,y(1:3,4:6)表示由y中第1行到第3行与第4列到第6列构成的子矩阵;
14、步骤6:在步骤5得到的凸的半正定规划问题的基础上,利用y中的各元素间的关系,构建二阶锥约束收紧后的半正定规划问题,描述为:
15、
16、步骤7:利用内点法对步骤6中的二阶锥约束收紧后的半正定规划问题进行求解,得到y的最优估计值,记为进而得到u和t各自的最优估计值,对应记为和其中,表示由中的第1个元素到第3个元素组成的子向量,表示由中的第4个元素到第6个元素组成的子向量。
17、与现有技术相比,本发明的优点在于:
18、1)现有的基于时延差和到达时间差的目标定位方法是利用闭式解来解决的,本发明方法利用变量间的内在关系对半正定松弛后的问题即凸的半正定规划问题进行收紧,相较于仅“松弛”不“收紧”的其他方法,这个策略能够有效地获取原约束加权最小二乘问题的全局最优解,相较于现有的方法,避免了局部收敛或发散的情况,进一步提升了本发明方法的定位精度,且对噪声更鲁棒。
19、2)本发明方法在经过巧妙地变换后,将原两种复杂非线性的距离测量模型(即构建的时延差测量模型和到达时间差测量模型)结合转化为一个更为简洁的伪线性方程,联合估计各未知量,相较于传统的高维搜索方法,极大地降低了计算复杂度。
20、3)本发明方法的实验结果表明在噪声不是很大的情况下,其是可以达到克拉美-罗下界(crlb)的目标定位精度的,具有稳定的性能表现。
- 还没有人留言评论。精彩留言会获得点赞!