一种基于双通道的GNSS/INS组合导航辅助方法
本发明涉及基于深度学习技术的组合导航定位,涉及一种基于双通道的gnss/ins组合导航辅助方法,特别是一种基于双通道cnn-residual-lstm的gnss/ins组合导航系统辅助方法。
背景技术:
1、惯性导航系统(ins)和全球卫星导航系统(gnss)是为地理参考提供位置和姿态信息的两种主要和最重要的方法。该系统在短时间内不受环境影响,具有较高的精度。然而,由于惯性测量单元(imu)的原始测量误差较大,独立的ins解决方案会随着时间的推移而退化。本研究采用来自gnss的信号提供高精度导航解决方案。在良好的能见度条件下,gnss可以在很长一段时间内提供连续和准确的导航信息。然而,仅靠gnss无法提供所有时间的可靠位置,因为卫星信号可能会受到高楼、高架、隧道、山脉、多径反射和恶劣天气条件的影响。由于其互补性,ins和gnss通常通过卡尔曼滤波(kf)进行集成,以提供连续和高精度导航。然而,当gnss信号被阻塞时,kf无法更新来自gnss测量的信息。同时,ins/gnss系统变为纯ins模式,其位置误差会在一段时间内发散。因此研究一种在gnss信号中断时,对组合导航系统进行补偿和辅助的智能算法是必要的。
2、在已发表的文章中,如在《中国惯性技术学报》的孙洪驰、穆荣军、杜华军、崔乃刚的一篇《基于bp神经网络辅助的惯性/天文组合导航方法》文章中采用导航估计误差对bp神经网络进行训练,再利用bp神经网络的输出结果辅助修正组合导航系统。还有在《sensors》中n.shaukat等人的一篇《multi-sensor fusion for underwater vehicle localizationby augmentation of rbf neural network and error-state kalman filter》利用径向基函数神经网络来补偿组合导航系统。在《ieee》中n.el-sheimy等人发表的一篇《theutilization of artificial neural networks for multisensor system integrationin navigation and positioning instruments》中在rbfnn的输入中加入了时间、速度、航向角等信息,以获得更准确、更稳定的结果。
3、上述神经网络都是静态神经网络。其主要思想是使用最后时刻的导航信息和当前时刻的训练值作为模型的输入输出。由于这类信息只能在网络的深度中垂直传播,不可能使用所有的历史信息,这会带来资源的浪费。在《ieee access》中y.zhang发表的《a fusionmethodology to bridge gps outages for ins/gps integrated navigation system》中提出了一种基于长短期记忆网络的融合方法,该方法可以自适应地使用历史数据而不增加额外的输入。考虑到组合导航系统输入信息之间的强耦合性,在《elsevier》中志卓、刘大同、刘连生的一篇《a performance compensation method for gps/ins integratednavigation system based on cnn–lstm during gps outages》中引入了卷积神经网络对数据进行预处理。
4、以上已发表的文章都对组合导航系统智能辅助方法进行了叙述和探究,均将姿态,速度等信息作为模型输入,并同时输出经纬度误差作为补偿,且均为针对常规路上轨迹进行预测补偿。故针对组合导航系统系统中经度误差的传播过程相较纬度误差的传播过程更加独立,既经纬度误差有着不同的数据分布的特性的研究,以及针对较为复杂的海上轨迹预测情况的研究,具有创新性和实际工程价值。
技术实现思路
1、针对上述现有技术,本发明要解决的技术问题是提供一种基于双通道cnn-residual-lstm的gnss/ins组合导航系统辅助方法,采用双通道模型,既使用不同的模型复杂度针对经度信息和纬度信息进行单独的拟合预测,以实现令不同数据分布的信息均达到最佳拟合的效果。
2、为解决上述技术问题,本发明的一种基于双通道的gnss/ins组合导航辅助方法,包括:
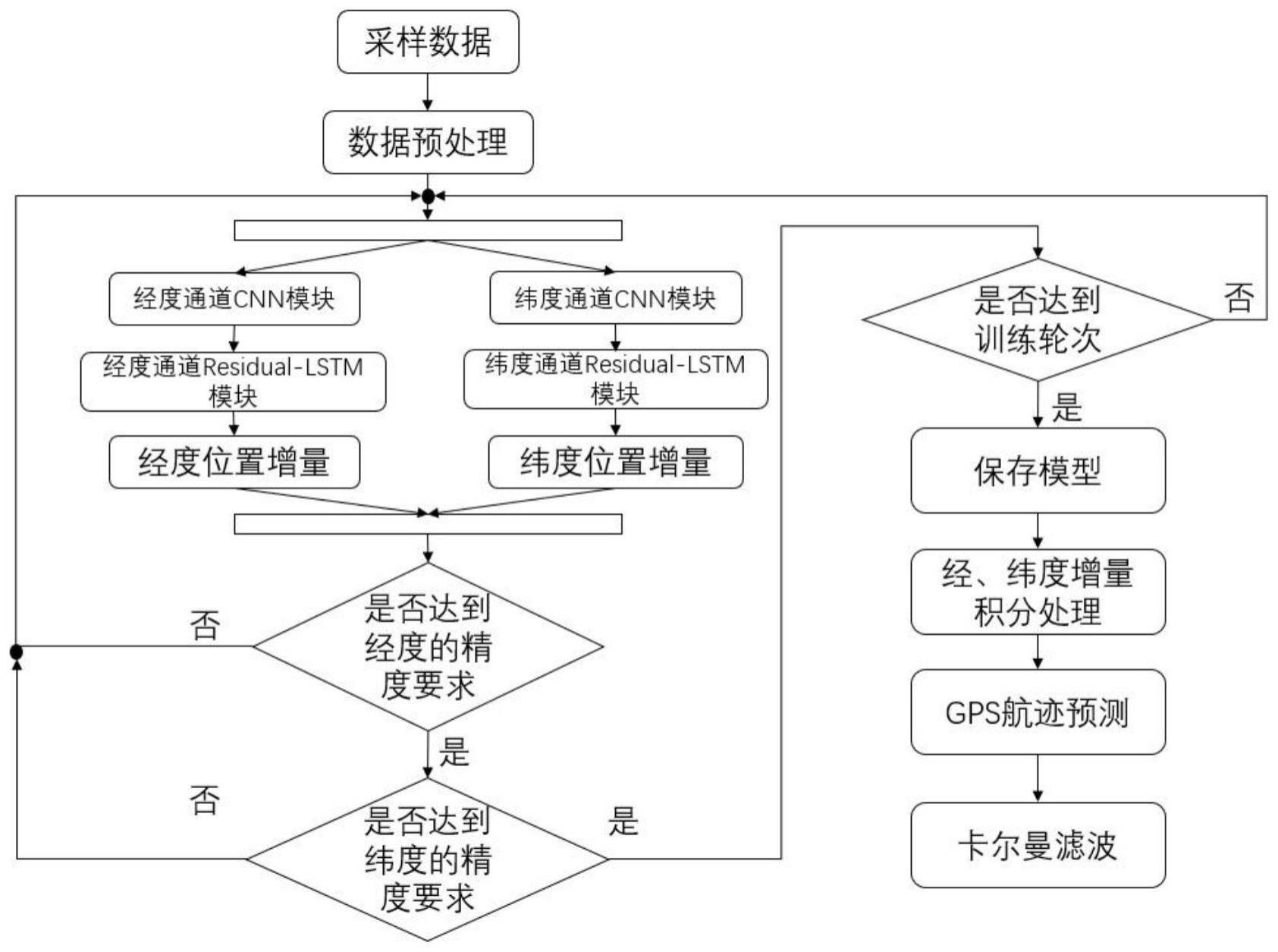
3、当gnss信号失效时,将采集的输入数据输入至预先训练的双通道cnn-residual-lstm模型中,分别输出gnss经度增量信息和gnss纬度增量信息,再通过对增量的积分得到gnss位置信息;其中,所述输入数据包括在gnss不可用时,采集t-n时刻至t时刻陀螺仪的输出加速度计的输出ins输出的三轴姿态ψins(t-n)…ψins(t)和速度信息vins(t-n)…vins(t);所述两个通道模型的模型结构相同、模型参数不同,均包括:cnn模块和residual-lstm模块;
4、所述双通道cnn-residual-lstm模型的训练过程包括:
5、步骤1、在gnss可用时,采集0到t时刻陀螺仪的输出加速度计的输出ins输出的三轴姿态ψins(0)…ψins(t)和速度信息vins(0)…vins(t)作为输入数据,并分别采集相同时间内的gnss的相邻时刻经度增量信息和纬度增量信息作为输出数据;
6、步骤2、在gnss可用时,对步骤1采集的输入数据和输出数据进行归一化处理,并划分为训练集和测试集,将输入数据处理为(batch-size,seq-len,input-size)三维张量矩阵,输出数据处理为(batch-size,seq-len,output-size)三维张量矩阵,其中batch-size表示批次数量,seq-len为时间序列数据集上的滑动窗口长度,input-size为双通道模型的输入纬度,output-size为双通道模型的期望输出纬度;
7、步骤3、从t=0时刻开始,采取adam优化算法进行权重的调整,将步骤2得到的输入数据的三维张量矩阵分别输入两个通道模型中的cnn模块进行解耦和特征提取;将解耦后的输入数据传递给residual-lstm模块,输出当前时间窗口内的经度增量信息和纬度增量信息,分别与步骤1中gnss经度增量信息、gnss纬度增量信息作比较,分别根据两者差值进行权重调整,然后窗口滑动至下一时刻,当前时刻残差residual-lstm模块中各层的隐状态传至下一时刻,作为下一时间窗口信息训练时的lstm层初始隐状态,重复执行步骤3,直至t-n时刻执行完毕后,分别判断两通道中输出的位置信息是否达到预设的精度要求,若达到,则执行步骤4;否则重复执行步骤3;
8、步骤4、判断是否达到训练轮次,若达到则对双通道cnn-residual-lstm模型进行保存,否则返回步骤3重复进行训练。
9、进一步的,所述cnn模块包括两组一维卷积层-池化层结构和两个全连接层。
10、进一步的,residual-lstm模块包括六层lstm层和一条残差高速通道,其中lstm层的模型为:
11、it=σ(wxixt+whiht-1+bi)
12、ft=σ(wxfxt+whfht-1+bf)
13、
14、ot=σ(wxoxt+whoht-1+bo)
15、
16、其中,xt为当前采样时刻的网络输入,it为输入门输出值,wxi为输入门中关于xt的权重,whi为输入门中关于ht-1的权重,ht-1为上一采样时刻的网络隐状态,ht为当前采样时刻的网络隐状态,bi为输入门的偏置量,ft为遗忘门输出值,σ(·)为sigmoid函数,wxf为遗忘门中输入关于xt的权重,whf为遗忘门中输入关于ht-1的权重,bf为遗忘门的偏置量,ct为当前采样时刻的单元状态,ct-1为上一采样时刻的单元状态,tanh(·)为激活函数tanh,wxc为tanh层中关于xt的权重,whc为tanh层中关于ht-1的权重,bc为tanh层的偏置量,为向量或矩阵的对应元素相乘,ot为输出门的输出值,wxo为输出门中关于xt的权重,who为输出门中关于ht-1的权重,bo为输出门的偏置量;
17、第二层的lstm层的输出信息经过残差高速通道与第四层lstm层的输出信息加和共同作为第五层lstm层的输入信息,具体为:
18、it,5=relu(ot,2)+ot,4
19、其中,it,5为第五层lstm层t时刻的输入;ot,2为第二层lstm层在t时刻的输出;ot,4为第四层lstm层在t时刻的输出;relu()为relu(x)=max(0,x)。
20、进一步的,所述通过对增量的积分得到gnss位置信息具体为:
21、
22、
23、其中,λgnss(t)为t时刻的gnss经度信息,为t时刻的gnss纬度信息δλgnss(a)=λgnss(a)-λgnss(a-1),a=t-n,…,t表示相邻时刻经度增量;表示相邻时刻纬度增量。
24、本发明的有益效果:
25、本发明的目的是为了克服gnss/ins组合导航系统智能辅助方法中,同时对二维经纬度信息进行预测时,无法令不同数据分布的信息同时达到最佳的拟合效果,并且针对较为复杂的海上航迹预测时,模型拟合能力不足的问题,提供一种双通道cnn-residual-lstm组合导航系统辅助方法。本方法采用双通道模型,既使用不同的模型复杂度针对经度信息和纬度信息进行单独的拟合预测,以实现令不同数据分布的信息均达到最佳拟合的效果。同时,为了适应相对复杂的轨迹情况,residual-lstm模型提高了多层lstm模型拟合能力,克服了模型退化,梯度消失等问题。在较为复杂的海上航迹预测效果上,本发明的方法亦有着更良好的表现。在辅助gnss/ins组合导航系统方法中,本发明更具针对性地对经、纬度信息进行预测,效果更佳。
26、与现有技术相比,本发明具有以下特点:
27、(1)针对有着较强耦合性的惯导输入信息,本发明利用卷积神经网络对信息进行解耦和特征提取,提高了后续深度学习模型的学习效率与训练速度。
28、(2)在惯导特性中,经度误差的传播过程相较于纬度误差的传播过程更加独立,既经度增量信息与纬度增量信息有着不同的数据分布。针对上述问题,本发明采用双通道模型,分别针对经度增量信息与纬度增量信息各自进行单独的拟合预测,解决了单通道多输出模型无法同时令经、纬度增量信息达到其各自的最佳拟合效果的问题,针对性的增强了模型对拥有不同数据分布特征的信息的拟合能力。
29、(3)本发明增加了lstm层数,并引入残差模块,提高了对信息的拟合能力,加快了多层lstm模型训练收敛的速度,并且有效解决了因层数过多带来的模型退化以及梯度消失问题。相较于已有的lstm模型,本发明中的residual-lstm模型可以完成更为复杂的海上航迹辅助导航任务。
- 还没有人留言评论。精彩留言会获得点赞!