一种同步测量重力加速度和磁场的原子干涉仪及其方法与流程
本发明属于重力场勘测,更具体地,涉及一种同步测量重力加速度和磁场的原子干涉仪及其方法。
背景技术:
1、利用原子干涉仪对重力加速度进行精密测量,在研究地球物理、基础科学和资源勘探方面都有着广泛的应用。常见的原子重力仪主要分为raman光方式和bragg光方式。其中,raman光方式的原子重力仪利用了双光子跃迁中原子外态动量态与原子内态能量态上的纠缠,同时做到了对外态重力加速度敏感与可以利用内态不同原子基态超精细分裂能级以达到方便探测的目的。而bragg方式的原子重力仪,保持原子在同一内部能级。常见的bragg方式的原子重力仪制备原子在与两个动量态上,内态则处于,对磁场不敏感,在测量重力的干涉路径上受磁场大小、梯度的影响扰动较小。对原子重力仪干涉路径上的磁场进行测量可以用来评估原子重力仪中由残余磁场所引起的系统误差。
2、和重力加速度的地位一样,测量磁场也非常重要。精密测量磁场同样在研究地球物理、基础科学和资源勘探方面都有着广泛的应用和很高的研究价值。常见的利用原子测量磁场的方式有光泵浦型的或者电子自旋交换弛豫型的,也可以利用原子内部磁子能级的干涉以进行测量。利用rf射频分离场技术,可以使某一基态超精细分裂能级f态上的2f+1个磁子能级发生ramsey干涉,通过干涉条纹的相移提取出干涉路径上的磁场信息。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种同步测量重力加速度和磁场的原子干涉仪及其方法,旨在解决现有的重力加速度测量方法由于磁场的存在(无论是地磁场、人造背景磁场b),在原子干涉测量g中会存在二阶塞曼效应,导致对g的测量会引入噪声与系统误差的问题。
2、为实现上述目的,本发明提供了一种同步测量重力加速度和磁场的方法,包括以下步骤:
3、步骤一:将三对冷却光和回泵光在各向线性梯度的磁场作用下,让原子团在三个空间维度上进行多普勒冷却;再关闭磁光阱磁场对热原子团进行亚多普勒冷却,获取冷原子源;
4、步骤二:利用线偏振的极化光使得冷原子团集中在|f=1,mf=0〉,再利用raman光使冷原子团集中在|p0,f=1,mf=0〉,完成冷原子团的初态制备;其中,所述极化光的方向与rf射频振荡线圈轴向垂直;
5、步骤三:冷原子团下降进入干涉时序,通过bragg光与rf射频场在冷原子团上施加bragg激光脉冲与rf射频脉冲,使冷原子团发生动量态的原子干涉和原子磁子能态干涉;其中,bragg光在竖直方向上照射在冷原子团上;rf射频场的振荡方向在水平方向上;
6、步骤四:完成干涉后,冷原子团自由下落至探测区,对干涉后的冷原子团施加raman光使其转移至|f=2〉进行原子布居数探测,通过原子布居数计算重力加速度和磁场。
7、进一步优选地,步骤一具体包括以下步骤:
8、对热原子源的加热丝通以电流产生焦耳热,使碱金属样品部分汽化,提供热原子团;
9、在反亥姆兹线圈中通以电流,在其几何中心产生一个中心磁势能零点,三个正交方向三对冷却光和回泵光在各向线性梯度的磁场作用下失谐,让热原子团在三个空间维度上均受到对头碰的光子动量传递而进行多普勒冷却;
10、关闭磁光阱的磁场,通过对冷却光和回泵光进行频率失谐调节,进而对经过多普勒冷却的热原子团进行亚多普勒冷却,获取冷原子团;其中,冷原子团温度<10 µk。
11、进一步优选地,步骤三具体包括以下步骤:
12、当冷原子团下落进入干涉时序后,在第一个bragg脉冲的作用下使冷原子团的动量发生相干分离;其中,冷原子团处于|p0, f=1, mf=0〉与|p1, f=1, mf=0〉的叠加态;第一个bragg脉冲的脉冲面积为π/2;
13、对冷原子团施加第一个rf射频脉冲,使冷原子团在磁子能级上发生相干分离;干涉过程中原子团处于|p0, f=1, mf=-1〉、|p0, f=1, mf=0〉、|p0, f=1, mf=+1〉、|p1, f=1, mf=-1〉、|p1, f=1, mf=0〉、|p1, f=1, mf=+1〉六个态的叠加态;
14、对冷原子团施加第二个bragg脉冲,使两条路径的冷原子团动量态反转;其中,第二个bragg脉冲的脉冲面积为π;
15、对冷原子团施加第二个rf射频脉冲,使冷原子团进行原子磁子能态干涉;
16、对冷原子团施加第三个bragg脉冲,使冷原子团进行动量态的原子干涉;其中,第三个bragg脉冲的脉冲面积为π/2。
17、进一步优选地,步骤四具体包括以下步骤:
18、步骤4.1:干涉过程之后,冷原子团自由下落至探测区;
19、步骤4.2:利用raman光将|p0, f=1, mf=0〉转移至|f=2〉;
20、步骤4.3:利用探测光、区域外的光电头与反射镜,对冷原子团进行荧光采集,将采集的光电信号转换成原子数;
21、步骤4.4:利用raman光将|p1, f=1, mf=0〉转移至|f=2〉;
22、步骤4.5:利用探测光、区域外的光电头与反射镜,对冷原子团进行荧光采集,将采集的光电信号转换成原子数;
23、步骤4.6:利用回泵光使剩余的所有原子处于原子态;
24、步骤4.7:利用探测光、区域外的光电头与反射镜,对冷原子团进行荧光采集,将采集的光电信号转换成原子数;
25、步骤4.8:采用原子数和原子数,通过计算动量态的原子布居数获取重力加速度;并采用原子数、原子数和原子数,通过计算磁子能级态的原子布居数获取磁场的磁感应强度。
26、进一步优选地,所述动量态的原子布居数为:
27、;
28、其中,, nkl gt2为重力引起的相移, g为待测重力加速度, n为bragg衍射阶数,为bragg光等引入的相移;为bragg激光波矢; t为用于测量g的干涉仪自由演化时间;
29、所述磁子能级态的原子布居数为:
30、;
31、其中,, κbtr为磁场引起的相移, b为待测磁场的磁感应强度, κ为塞曼系数,为射频场引入的相位;为用于测量b的干涉仪自由演化时间。
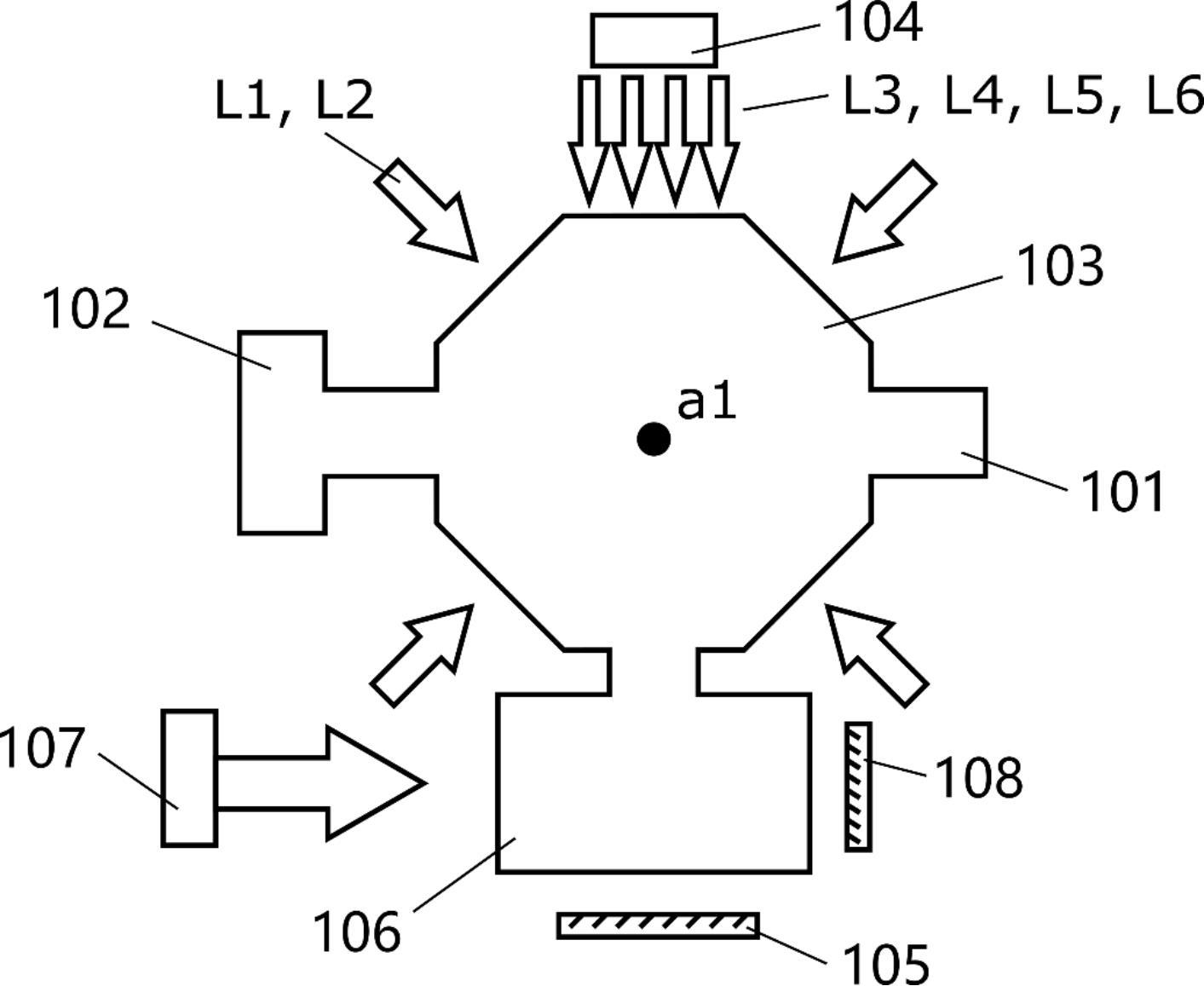
32、另一方面,本发明提供了一种同步测量重力加速度和磁场的原子干涉仪,包括:冷原子制备系统、rf射频振荡线圈、激光发生系统和探测系统;
33、冷原子制备系统,其内设置有真空区域;用于三对冷却光和回泵光在各向线性梯度的磁场作用下失谐,让热原子团在三个空间维度上进行多普勒冷却;再关闭磁光阱磁场对热原子团进行亚多普勒冷却;获取冷原子团;
34、激光发生系统用于产生bragg型原子干涉测量重力加速度g所需的bragg光;以及用于产生raman光、冷却光、回泵光和极化光;
35、其中,利用线偏振的极化光使得冷原子团集中在|f=1, mf=0〉;再利用raman光使冷原子团集中在|p0,f=1,mf=0〉,完成冷原子团的初态制备;
36、rf射频振荡线圈用于产生原子干涉测量磁场b所需的rf射频磁场;
37、冷原子团下降进入干涉时序,则在真空区域中通过bragg光与rf射频场在冷原子团上施加bragg激光脉冲与rf射频脉冲,使冷原子团发生动量态的原子干涉和原子磁子能态干涉;
38、探测系统,其内设置有探测区,用于完成干涉后,冷原子团自由下落至探测区,对干涉后的冷原子团施加raman光,使处于|p0, f=1, mf=0〉与|p1, f=1, mf=0〉的冷原子团转移至|f=2〉进行原子布居数探测,通过原子布居数计算重力加速度和磁场。
39、进一步优选地,冷原子制备系统包括热原子团、磁光阱装置和亚多普勒冷却装置;
40、热原子源,用于对加热丝通以电流产生焦耳热,使碱金属样品部分汽化,提供热原子团;
41、磁光阱装置,用于在反亥姆兹线圈中通以电流,在几何中心产生一个中心磁势能零点,使三个正交方向三对冷却光和回泵光在各向线性梯度的磁场作用下失谐,让热原子团在三个空间维度上均受到对头碰的光子动量传递而进行多普勒冷却;
42、亚多普勒冷却装置,用于当关闭磁光阱的磁场后,通过对冷却光和回泵光进行频率失谐调节,实现对经过多普勒冷却的热原子团进行亚多普勒冷却,获取冷原子团;其中,冷原子团温度<10 µk。
43、进一步优选地,冷原子团发生动量态的原子干涉和原子磁子能态干涉的过程为:
44、当冷原子团下落进入干涉时序后,在第一个bragg脉冲的作用下使冷原子团的动量发生相干分离;其中,冷原子团处于|p0, f=1, mf=0〉与|p1, f=1, mf=0〉的叠加态;第一个bragg脉冲的脉冲面积为π/2;
45、对冷原子团施加第一个rf射频脉冲,使冷原子团在磁子能级上发生相干分离;其中,干涉过程中原子团处于|p0, f=1, mf=-1〉、|p0, f=1, mf=0〉、|p0, f=1, mf=+1〉、|p1, f=1, mf=-1〉、|p1, f=1, mf=0〉、|p1, f=1, mf=+1〉六个态的叠加态;
46、对冷原子团施加第二个bragg脉冲,使两条路径的冷原子团动量态反转;其中,第二个bragg脉冲的脉冲面积为π;
47、对冷原子团施加第二个rf射频脉冲,使冷原子团进行原子磁子能态干涉;
48、对冷原子团施加第三个bragg脉冲,使冷原子团进行动量态的原子干涉;其中,第三个bragg脉冲的脉冲面积为π/2。
49、进一步优选地,所述探测光装置包括探测区、探测激光出射模块、光电头、反射镜和数据分析处理模块;
50、完成干涉的冷原子团自由下落至探测区;施加raman光对原子|p0, f=1, mf=0〉与|p1, f=1, mf=0〉布居数进行探测;再对冷原子团施加回泵光,对参与干涉的总原子数进行探测,计算重力加速度和磁场;
51、探测激光出射模块用于提供探测光;反射镜用于反射探测光;探测光、区域外的光电头、反射镜共同用于对冷原子团进行荧光采集,将采集的光电信号转换成第一原子数、第二原子数和第三原子数;
52、数据分析处理模块用于采用原子数和原子数,通过计算动量态的原子布居数获取重力加速度;并采用原子数、原子数和原子数,通过计算磁子能级态的原子布居数获取磁场的磁感应强度。
53、进一步优选地,所述动量态的原子布居数为:
54、;
55、其中,, nkl gt2为重力引起的相移, g为待测重力加速度, n为bragg衍射阶数,为bragg光等引入的相移;为bragg激光波矢; t为用于测量g的干涉仪自由演化时间;
56、所述磁子能级态的原子布居数为:
57、;
58、其中,, κbtr为磁场引起的相移, b为待测磁场的磁感应强度, κ为塞曼系数,为射频场引入的相位;为用于测量b的干涉仪自由演化时间。
59、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
60、本发明提供了一种同步测量重力加速度和磁场的原子干涉仪及其方法,其中,冷原子团下降进入干涉时序,通过bragg光与rf射频场在冷原子团上施加bragg激光脉冲与rf射频脉冲,使冷原子团发生动量态的原子干涉和原子磁子能态干涉;完成干涉后,冷原子团自由下落至探测区,对干涉后的冷原子团施加raman光进行动量态的原子布居数探测和磁子能级态的原子布居数探测;再对冷原子团施加回泵光,对参与干涉的总原子数进行探测,计算重力加速度和磁场。从中可以看出,相比现有技术由于磁场的存在(无论是地磁场、人造背景磁场b),在原子干涉测量g中会存在二阶塞曼效应,对g的测量引入噪声与系统误差;本发明同步得出原子团轨迹处的g和b,是一种在重力测量中提供的原位测量磁场的方法,还可以利用所测得的b来修正测量g所包含的系统误差;即在每个时序得出重力加速度g与磁场b的值,能利用b的值来对g的误差进行修正。
- 还没有人留言评论。精彩留言会获得点赞!