一种针对TDMA距离解模糊的脉冲相位编码方法
本发明属于雷达,具体涉及一种针对tdma距离解模糊的脉冲相位编码方法。
背景技术:
1、在很多mimo雷达的研究中,发射信号采用正交波形,这样就可以在接收端分离不同发射波形对应的回波。mimo雷达正交波形分为快时间正交波形与慢时间正交波形两类。快时间mimo雷达正交波形包括码分多址(code division multiple access,cdma)和频分多址(frequency division multiple access,fdma),通过在发射端发射正交波形,并在接收端通过快时间的滤波器分离发射信号来实现多发多收。慢时间mimo雷达正交波形包括多普勒频分多址(doppler division multiple access,ddma)和时分多址(time divisionmultiple access,tdma),各发射阵元采用相同的基带波形,通过在每个发射阵元上附加相位调制或者控制它们在不同时间发射,使回波信号的脉冲串能够彼此区分,从而在慢时间域分离各阵元发射波形产生的回波。对于机载雷达,快时间正交波形mimo雷达相对于慢时间正交波形mimo雷达来说存在一定的缺陷,一方面各阵元产生和发射和分离不同的基带波形需要更加复杂的硬件和信号处理电路,增加了系统的复杂性和成本;另一方面,各阵元发射的不同正交波形往往具有不同的频谱,会破坏发射阵元间杂波的相关性,难以利用发射自由度进行杂波抑制,不利于发挥mimo雷达的优势。与传统的相控阵雷达系统相比,tdma-mimo雷达中提供的发射自由度理论上能够在目标检测、角度估计和杂波抑制等方面提供了更好的性能。对于慢时间正交波形mimo雷达中的tdma-mimo雷达,这种雷达不需要对各个发射阵元进行单独的波形设计,只需要各个阵元分时发射,能够减小雷达系统结构的复杂度;另一方面所有阵元、所有脉冲发射波形的地面杂波具有很高的相关性,有利于杂波抑制。
2、在机载雷达平台中,如果一个目标的前一个脉冲的回波还没有被接收到而下一个脉冲已经发射,就会出现距离模糊。距离模糊问题使目标的真实距离与视在距离相差prf对应的最大不模糊距离的整数倍,严格周期性的脉冲发射导致目标真实距离难以判断。传统相控阵雷达解距离模糊方法常见方法是脉冲重复频率参差,通过采用不同的重复频率发射脉冲,可使得远距离的目标得到不同的视在距离,利用多重频对应的不同视在距离求解真实距离。但是多重频的方法需要发射不同重复频率脉冲信号求解模糊次数,工作时间更长。而在tdma-mimo雷达由于发射相位中心随脉冲变化,并且由于阵列长度有限,发射相位中心不满足与脉冲序号之间的线性关系,因此回波导向矢量的相位不满足传统的simo雷达随脉冲数递增的线性关系。这就意味着回波处于稳态时不同距离模糊数对应的距离区间的目标回波具有不同形式的导向矢量,使存在目标距离模糊时的信号更加复杂,给目标相干积累带来困难。考虑到不同距离模糊次数的目标回波导向矢量也不同,因此可以利用tdma-mimo雷达这一特性用于解距离模糊。在随机发射模式下通过使用多个不同的导向矢量计算多个滤波权矢量,对回波数据进行滤波,可以在获得较好的目标相干积累的同时,实现距离解模糊。但是随机发射模式下目标接近阵列法线方向无法正确解距离模糊。因此需要结合随机发射模式下回波特性研究一种可以在整个扫描范围内实现对目标信号解距离模糊的波形设计方法。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种针对tdma距离解模糊的脉冲相位编码方法。本发明要解决的技术问题通过以下技术方案实现:
2、本发明实施例提供了一种针对tdma距离解模糊的脉冲相位编码方法,包括步骤:
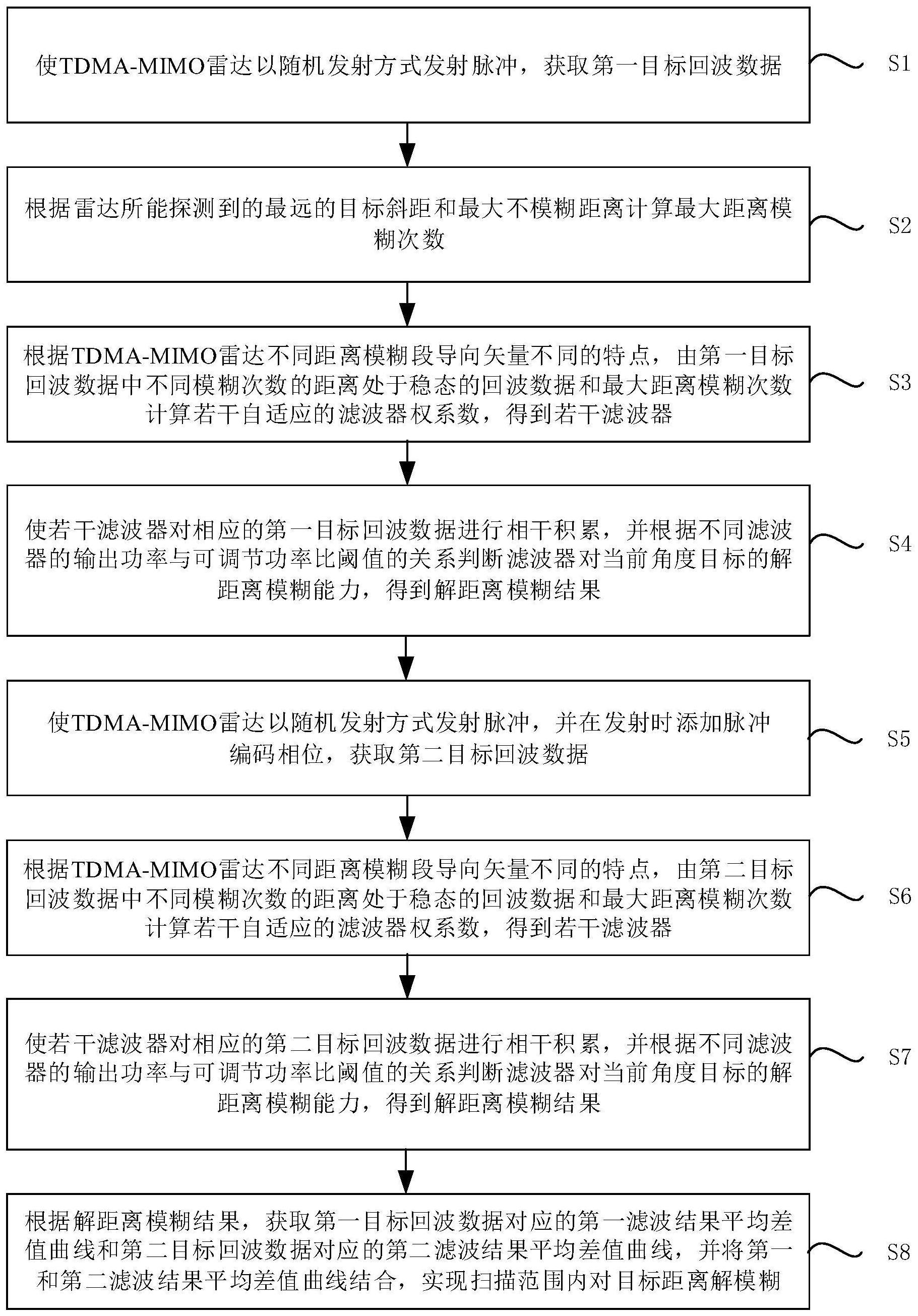
3、使tdma-mimo雷达以随机发射方式发射脉冲,获取第一目标回波数据;
4、使tdma-mimo雷达以所述随机发射方式发射脉冲,并在发射时添加脉冲编码相位,获取第二目标回波数据;
5、根据雷达所能探测到的最远的目标斜距和最大不模糊距离计算最大距离模糊次数;
6、根据tdma-mimo雷达不同距离模糊段导向矢量不同的特点,由所述第一目标回波数据或第二目标回波数据中不同模糊次数的距离处于稳态的回波数据和所述最大距离模糊次数计算若干自适应的滤波器权系数,得到若干滤波器;
7、使所述若干滤波器对相应的第一目标回波数据或第二目标回波数据进行相干积累,并根据不同滤波器的输出功率与可调节功率比阈值的关系判断滤波器对当前角度目标的解距离模糊能力,得到解距离模糊结果。
8、在本发明的一个实施例中,使tdma-mimo雷达以随机发射方式发射脉冲,获取第一目标回波数据,包括:
9、使tdma-mimo雷达以随机发射方式发射脉冲,获取第n个阵元接收的目标回波信号:
10、
11、其中,ar表示接收信号的复幅度,k表示第k个脉冲,k表示1个相干处理时间间隔内发射k个脉冲,up表示脉冲发射的基带波形,t表示对应时刻,tr表示脉冲重复周期,f0表示发射信号的载波频率,ψ0表示发射信号的初始相位,τ表示延迟,τ=τr(t)-τr-τt,τr(t)=2r(t)/c=2(r0-vt)/c,r(t)表示参考阵元相对于目标的距离,c表示光速,r0表示初始时刻参考阵元与目标间的距离,v表示目标与飞机之间的相对运动速度,τr=ndcosψt/c,n表示第n个阵元,d表示阵元间距,ψt表示目标相对于机载平台的入射锥角,τt=dt(k)dcosψt/c,dt(k)表示第k次脉冲挑选的发射阵元序号;
12、根据所述第n个阵元接收的目标回波信号进行下变频和匹配滤波推出的回波信号计算接收端空域导向矢量、时域导向矢量、发射端空域导向矢量:
13、
14、
15、
16、其中,ar(ψt)表示接收端空域导向矢量,b(fttr)为时域导向矢量,at(ψt)为发射端空域导向矢量,λ0表示信号波长,n表示接收阵元数,fd表示多普勒频率,dt表示对应脉冲挑选的发射阵元序号;
17、根据所述接收端空域导向矢量、时域导向矢量、发射端空域导向矢量计算目标的空时二维导向矢量:
18、
19、利用所述空时二维导向矢量计算所述第一目标回波数据:
20、xt=atvt
21、其中,at表示回波的复幅度。
22、在本发明的一个实施例中,所述脉冲编码相位为:
23、φk=2πdk*0.5=πdk
24、其中,dk表示第k次脉冲挑选的发射阵元序号;
25、相应的,法线方向接收到的第二目标回波数据为:
26、
27、其中,τ0表示目标对应的回波时延,fd0表示目标径向速度引起的多普勒频率,fs0表示角度为法线方向的目标空间频率,值为0,φk表示编码相位,fsx表示角度为0度的目标空间频率。
28、在本发明的一个实施例中,所述最大距离模糊次数为:
29、
30、其中,表示向下取整,rmax表示雷达所能探测到的最远的目标斜距,ru表示最大不模糊距离,ru=c/2fr,fr表示脉冲重复频率。
31、在本发明的一个实施例中,根据tdma-mimo雷达不同距离模糊段导向矢量不同的特点,由所述目标回波数据中不同模糊次数的距离处于稳态的回波数据和所述最大距离模糊次数计算若干自适应的滤波器权系数,得到若干滤波器,包括:
32、由所述目标回波数据获取距离模糊次数为l的距离rl处于稳态的回波数据:
33、
34、其中,l表示距离模糊次数;
35、根据所述处于稳态的回波数据定义不同模糊次数的偏移矩阵:
36、
37、其中,i表示偏移矩阵的行序号,j表示偏移矩阵的列序号;
38、利用所述偏移矩阵计算不同模糊次数的目标回波导向矢量:
39、
40、其中,v't表示回波处于稳态时对应的回波导向矢量,大小为n(k-nr)×1,表示目标全部脉冲的空时二维导向矢量,大小为nk×1,en表示n×n大小的单位矩阵;
41、根据所述目标回波导向矢量计算滤波器权矢量:
42、
43、其中,wl表示假设距离模糊次数为l构建的滤波器权矢量,l=0,1,…,nr,μ表示常量,rcn表示杂波和噪声信号的协方差矩阵,v'tl表示假设距离模糊次数为l的导向矢量;
44、利用所述滤波器权矢量和所述最大距离模糊次数构建一组自适应的滤波器权系数,得到所述若干滤波器,其中,所述滤波器权系数为:
45、
46、在本发明的一个实施例中,使所述若干滤波器对相应的第一目标回波数据进行相干积累的过程中,法线方向的距离模糊函数为:
47、
48、其中,δτ表示目标间的时延差值,n表示接收阵元数目,k表示一个cpi内脉冲数,χp表示载频信号对应的模糊函数,k1表示一组脉冲序号,k2表示另一组脉冲序号,tr表示脉冲重复周期。
49、在本发明的一个实施例中,使所述若干滤波器对相应的第二目标回波数据进行相干积累的过程中,法线方向的距离模糊函数为:
50、
51、其中,fs0表示角度为法线方向的目标空间频率,fsx表示角度为0度的目标空间频率,表示一组脉冲对应的发射阵元序号,表示另一组脉冲对应的发射阵元序号;
52、完全模糊函数为:
53、
54、其中,δfd表示目标间的多普勒频率差,fs1表示不同空间角度对应的空间频率。
55、在本发明的一个实施例中,添加脉冲编码后的等效角度为:
56、
57、其中,β表示等效角度,α表示编码前角度。
58、在本发明的一个实施例中,根据不同滤波器的输出功率与可调节功率比阈值的关系判断滤波器对当前角度目标的解距离模糊能力,包括:
59、设定可调节功率比阈值pa,计算任意两个滤波器的输出功率的比值10log(pa/pb),当所述比值10log(pa/pb)满足10log(p0/p1)>pa时,判断输出功率较大的滤波器的距离模糊次数为当前角度目标的距离模糊次数。
60、在本发明的一个实施例中,得到解距离模糊结果之后,还包括步骤:
61、根据所述解距离模糊结果,获取第一目标回波数据对应的第一滤波结果平均差值曲线和第二目标回波数据对应的第二滤波结果平均差值曲线,并将所述第一滤波结果平均差值曲线和所述第二滤波结果平均差值曲线结合,实现扫描范围内对目标距离解模糊。
62、与现有技术相比,本发明的有益效果:
63、本发明的方法利用机载tdma-mimo雷达不同距离模糊段导向矢量不同的特点,构建多组滤波器对目标信号进行相干积累,可以在得到最优相干积累的同时实现距离解模糊,相对于传统的脉冲重复频率参差方法,减少了雷达工作时间;针对随机发射模式下机载tdma-mimo雷达进行脉冲相位编码的波形设计,使原本在阵列法线方向附近距离解模糊能力的缺陷偏移到扫描范围极限两侧,脉冲相位编码前后的结合实现在整个扫描范围内距离解模糊,改进了原本不能对接近阵列法线方向的目标距离解模糊的缺陷。
- 还没有人留言评论。精彩留言会获得点赞!