一种基于无人机网络拓扑优化的测绘方法与流程
本发明属于无人机,具体涉及一种基于无人机网络拓扑优化的测绘方法。
背景技术:
1、土地测绘以全球定位系统(global positioning system,简称gps)、遥感(remotesensing,简称rs)、地理信息系统(geographic information systems,简称gis)为技术核心,通过测量手段获得反映地面现状的图形和位置信息,供工程建设的规划设计和行政管理之用。
2、土地测绘过程中,利用无人机群构成的网络拓扑结构对地面现状的图形和位置信息进行监测,并将监测数据返回地面站进行数据分析。可见,无人机在整个监测过程中至关重要。但无人机在监测过程中,存在由于无人机覆盖不全面、外界信号干扰、天气变化等因素的影响,使得无人机监测数据不够准确,导致获取的遥感影像不精确,进而导致后续土地分析过程出现较大偏差;同时,在监测过程中,若无人机受到外界信号干扰、天气变化等影响时,由于遇到短暂信号干扰而失去控制而出现失控炸机的现象。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于无人机网络拓扑优化的测绘方法。本发明要解决的技术问题通过以下技术方案实现:
2、本发明实施例提供了一种基于无人机网络拓扑优化的测绘方法,应用于无人机群构成的网络拓扑结构中,对应方法包括:
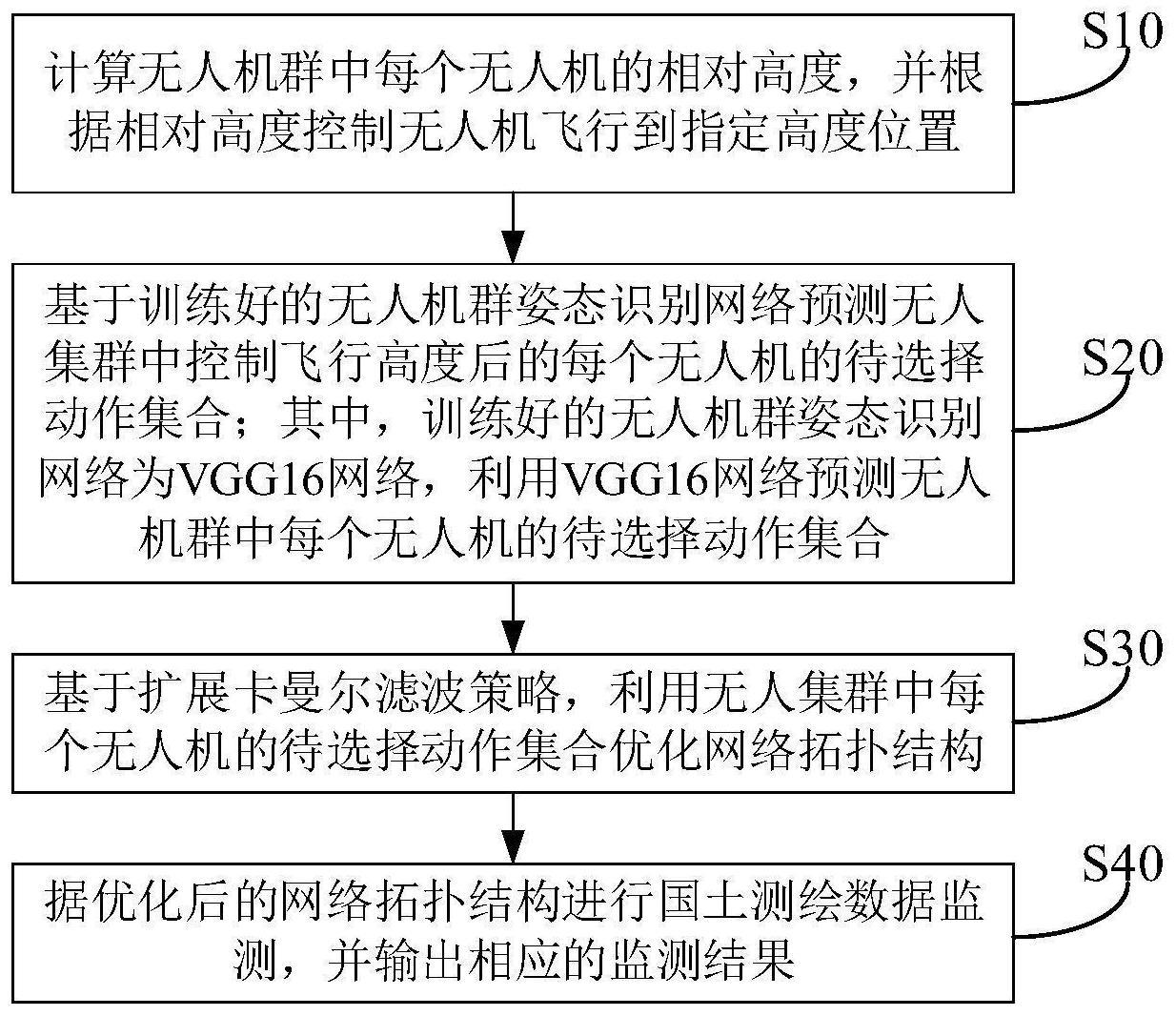
3、计算无人机群中每个无人机的相对高度,并根据所述相对高度控制无人机飞行到指定高度位置;
4、基于训练好的无人机群姿态识别网络识别无人集群中控制飞行高度后的每个无人机的待选择动作集合;
5、基于扩展卡曼尔滤波策略,利用无人集群中每个无人机的待选择动作集合优化网络拓扑结构;
6、根据优化后的网络拓扑结构进行测绘数据监测,并输出相应的监测结果;
7、其中,训练好的无人机群姿态识别网络为vgg16网络,利用所述vgg16网络预测无人机群中每个无人机的待选择动作集合。
8、在本发明的一个实施例中,所述无人机群中每个无人机安装有飞行控制计算机、差分卫星导航系统、地面气压高度计和机载气压高度计;对应计算网络拓扑结构中每个无人机的相对高度之前,还包括:
9、利用所述差分卫星导航系统获取每个无人机飞行前与后分别对应的高度信息h1和h2,并利用所述飞行控制计算机,根据高度信息h1和h2计算对应的卫星相对高度;
10、利用所述地面气压高度计获取每个无人机飞行前与后分别对应的高度信息h3和h4,并利用所述飞行控制计算机,根据高度信息h3和h4计算对应的第一高度变化量;
11、利用所述机载气压高度计获取每个无人机飞行前与后分别对应的高度信息h5和h6,并利用所述飞行控制计算机,根据高度信息h5和h6计算对应的第二高度变化量;
12、根据所述第一高度变化量和所述第二高度变化量计算参考相对高度;
13、创建参考相对高度映射表,将所述参考相对高度及对应的卫星相对高度存储于所述参考相对高度映射表中。
14、在本发明的一个实施例中,每个无人机飞行后,当所述差分卫星导航系统有效时,对应计算网络拓扑结构中每个无人机的相对高度的过程,包括:
15、将所述卫星相对高度作为网络拓扑结构中每个无人机的相对高度。
16、在本发明的一个实施例中,每个无人机飞行后,当所述差分卫星导航系统无效时,对应计算网络拓扑结构中每个无人机的相对高度的过程,包括:
17、利用所述地面气压高度计获取每个无人机飞行前与后分别对应的高度信息h3和h'4,并利用所述飞行控制计算机,根据高度信息h3和h'4计算对应的第三高度变化量;
18、利用所述机载气压高度计获取每个无人机飞行前与后分别对应的高度信息h5和h'6,并利用所述飞行控制计算机,根据高度信息h5和h'6计算对应的第四高度变化量;
19、根据所述第三高度变化量和所述第四高度变化量计算每个无人机的实际相对高度;
20、利用每个无人机的实际相对高度查找所述参考相对高度映射表读取对应的参考相对高度及卫星相对高度,将所述卫星相对高度作为对应每个无人机的相对高度。
21、在本发明的一个实施例中,利用所述vgg16网络预测无人机群中每个无人机的待选择动作集合,包括:
22、获取无人机群中每个无人机的历史运动姿态集合;
23、将所述历史运动姿态集合作为训练数据输入初始的vgg16网络进行训练;
24、并将每个无人机飞行中当前运动姿态集合输入训练好的vgg16网络得到每个无人机的待选择动作集合。
25、在本发明的一个实施例中,将所述历史运动姿态集合输入初始的vgg16网络或所述当前运动姿态集合输入训练好的vgg16网络之前,还包括:
26、将运动姿态集合中每一视频数据转化为多帧静态图像;其中,所述运动姿态集合包括所述历史运动姿态集合和所述当前运动姿态集合;
27、针对每一帧静态图像,对对应的静态图像进行对比度变换。
28、在本发明的一个实施例中,对对应的静态图像进行对比度变换,包括:
29、通过直方图均衡化方法对对应的静态图像进行对比度变换。
30、在本发明的一个实施例中,基于扩展卡曼尔滤波策略,利用网络拓扑结构中每个无人机的待选择动作集合优化网络拓扑结构,包括:
31、基于网络拓扑结构中无人机j(j≠i)的待选择动作集合,无人机i计算无人机j的所有动作策略倾向;
32、遍历无人机i的待选择动作集合,执行以下过程:基于连续玻尔兹曼方程的自回归模型,无人机i根据从待选择动作集合中选择一待选动作计算无人机j选择该待选动作的策略倾向;基于无人机j选择该待选动作的策略倾向,无人机i通过连续玻尔兹曼分量更新无人机j选择该待选动作的策略概率;基于无人机j选择该待选动作的策略概率,计算无人机i对应所有无人机j选择该待选择动作的联合概率;基于所有无人机j选择该待选择动作的联合概率,计算所有无人机j的最可能待选动作;设计无人机i的奖励函数,基于所有无人机j选择最可能待选动作选择使奖励函数最大化对应无人机i的最佳选择动作;无人机i基于最佳选择动作进行移动,观察无人机j的动作变化;
33、重复执行上述过程,直至网络拓扑结构中无人机群均趋于稳定状态以优化网络拓扑结构。
34、在本发明的一个实施例中,对应方法还包括:
35、对所述监测结果进行配准处理。
36、在本发明的一个实施例中,对所述监测结果进行配准处理,包括:
37、利于预设的纠正模型对所述监测结果进行几何纠正;
38、选取若干几何纠正控制点,利用选取的若干几何纠正控制点对几何纠正后的监测结果进行配置处理。
39、本发明的有益效果:
40、本发明提出的基于无人机网络拓扑优化的测绘方法,从拍摄测绘数据的无人机群构成的网络拓扑结构出发,通过优化网络拓扑结构以拍摄更为精确的遥感图像,具体方法包括:计算无人机群中每个无人机的相对高度,并根据相对高度控制无人机飞行到指定高度位置;基于训练好的无人机群姿态识别网络识别无人集群中控制飞行高度后的每个无人机的待选择动作集合;基于扩展卡曼尔滤波策略,利用无人集群中每个无人机的待选择动作集合优化网络拓扑结构;根据优化后的网络拓扑结构进行测绘数据监测,并输出相应的监测结果;其中,训练好的无人机群姿态识别网络为vgg16网络,利用vgg16网络预测无人机群中每个无人机的待选择动作集合。可见,本发明实施例从两方面优化无人机网络拓扑结构,一方面实时计算网络拓扑结构中每一无人机的相对高度,控制无人机飞行到指定高度位置,以避免无人机监测过程中,由于受外界、环境变化等的影响,使得无人机可以起飞达到预先指定高度位置,在更合理的高度范围对地面进行监测,保证无人机覆盖率,获取更高精度的遥感图像,另一方面,基于无人机群姿态识别网络和扩展卡曼尔滤波策略实现无人机群中每一无人机的自主控制,针对无人机受到外界信号干扰、天气变化等影响导致失控后可自主飞行,其中无人机群姿态识别网络采用的是vgg16网络模型,vgg16网络模型识别局限性小、迁移性好、占用计算资源低,可实现较大规模的无人机姿态的实时识别,再通过扩展卡曼尔滤波策略实时观察无人机群中每个无人机相对其他无人机的移动状态,即使在信号干扰情况下,依然可以基于扩展卡曼尔滤波策略对无人机群中每个无人机做出快速动态调整,使得无人机可以避免在信号干扰下可能出现失控炸机的现象,进而通过快速调整后可以保证无人机覆盖率,进一步获取更高精度的遥感图像。基于上述优化后的网络拓扑结构,可以更好的实现无人机对地面现状的图形和位置信息的监测,以供工程建设的规划设计和行政管理之用。
41、以下将结合附图及实施例对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!