GNSS接收机级联式矢量跟踪方法和矢量跟踪环路
本发明涉及一种导航卫星定位技术,尤其涉及一种gnss接收机级联式矢量跟踪方法和矢量跟踪环路。
背景技术:
1、全球卫星导航系统(gnss)具有全天候、全时间的特点,可以进行定位、导航和授时,并广泛应用于手机导航、车载/船载导航以及无人驾驶等领域。gnss接收机可以对卫星信号进行接收、捕获、跟踪以及定位解算。
2、目前问题在于:在丛林区域等的信号遮挡、高动态以及信号干扰等恶劣环境下,gnss接收机跟踪环路相关参数易发生异常,出现跟踪环路失锁现象。目前,传统的gnss接收机矢量跟踪技术还不能有效解决上述问题。
技术实现思路
1、本发明的目的在于提供一种gnss接收机级联式矢量跟踪方法和矢量跟踪环路,该矢量跟踪方法和矢量跟踪环路能够使gnss接收机在卫星信号遮挡环境、高动态等恶劣环境下能够实现较好的定位导航效果。
2、为了实现上述技术目的,本发明采用如下技术方案:
3、一种gnss接收机级联式矢量跟踪方法,包括:
4、将if信号与本地复制的载波/码信号进行混频和相关处理,得出基带信号;
5、对基带信号进行相干积分处理,得出相干积分值;
6、对相干积分值进行非相干积分处理,得出平均载波相位误差以及平均码相位误差;
7、将平均载波相位误差和平均码相位误差用作滤波的量测信息输入,对基带信号实施基于最大相关熵的卡尔曼滤波处理,得出载波频率误差以及码相位误差;
8、依据接收机位置信息以及卫星位置信息计算得出单位视距向量;
9、依据单位视距向量计算得出导航滤波器量测矩阵;
10、依据码相位误差和载波频率误差计算得出导航滤波器量测信息,其中包括伪距误差δρ与伪距率误差
11、利用卫星的位置、速度和时间信息以及导航滤波器量测信息、单位视距向量和量测矩阵,来对gnss接收机基带信号进行卡尔曼滤波处理,从而得到gnss接收机及其载体的位置、速度以及时间信息。
12、进一步地,
13、在gnss接收机矢量跟踪环路的卡尔曼滤波中引入最大相关熵准则,取代最小均方差准则;此时,卡尔曼滤波中mcc对应的优化方程jm(xk)如下:
14、
15、其中,gσ(||x-y||)为高斯核函数,zk是量测向量;hk是环路卡尔曼滤波器在k时刻的量测矩阵;xk是环路卡尔曼滤波在k时刻的状态向量,xk-1是环路卡尔曼滤波在k-1时刻的状态向量,fk-1是环路卡尔曼滤波器在k-1时刻的状态转移矩阵,是环路卡尔曼滤波器在k时刻的量测噪声协方差矩阵rk的逆矩阵,是环路卡尔曼滤波器在k时刻的先验估计协方差矩阵pk/k-1的逆矩阵;
16、gnss接收机级联式跟踪方法用于自适应调节矢量跟踪环路滤波器的量测噪声协方差矩阵,得到的新的k时刻的量测噪声协方差矩阵可以表示为:
17、
18、其中,lk为调节因子,计算如下:
19、
20、进一步地,所述本地复制的载波/码信号,其通过下述方法获取:
21、利用导航滤波器输出的位置、速度信息,来产生码频率控制量以及载波频率控制量;
22、基于码频率控制量以及载波频率控制量,来更新频率控制字,控制本地载波信号和c/a码信号的生成,得到本地复制的c/a码信号与载波信号。
23、进一步地,所述相干积分值包括超前同相信号ie、即时同相信号ip、滞后同相信号il、超前正交信号qe、即时正交信号qp、以及滞后正交信号ql。
24、进一步地,
25、所述伪距误差通过公式
26、
27、来计算得出,
28、式中,表示卫星i在k时刻的伪距误差,δτi表示通道i的码相位误差,c表示光速,fca表示c/a码频率;
29、所述伪距率误差通过公式
30、
31、来计算得出,
32、式中,表示卫星i在k时刻的伪距率误差,表示通道i的载波频率变化率误差,c表示光速,fcode表示码频率(10.23mhz),fcarrier表示载波频率(1575.42mhz),vusr表示接收机的速度,表示卫星i的速度,li是表示gnss接收机与卫星i的单位视距向量,表示接收机钟漂,表示卫星钟漂;
33、量测矩阵表示为:
34、
35、代表在k时刻卫星i和接收机之间的视距向量,下标表示x,y,z三个方向。
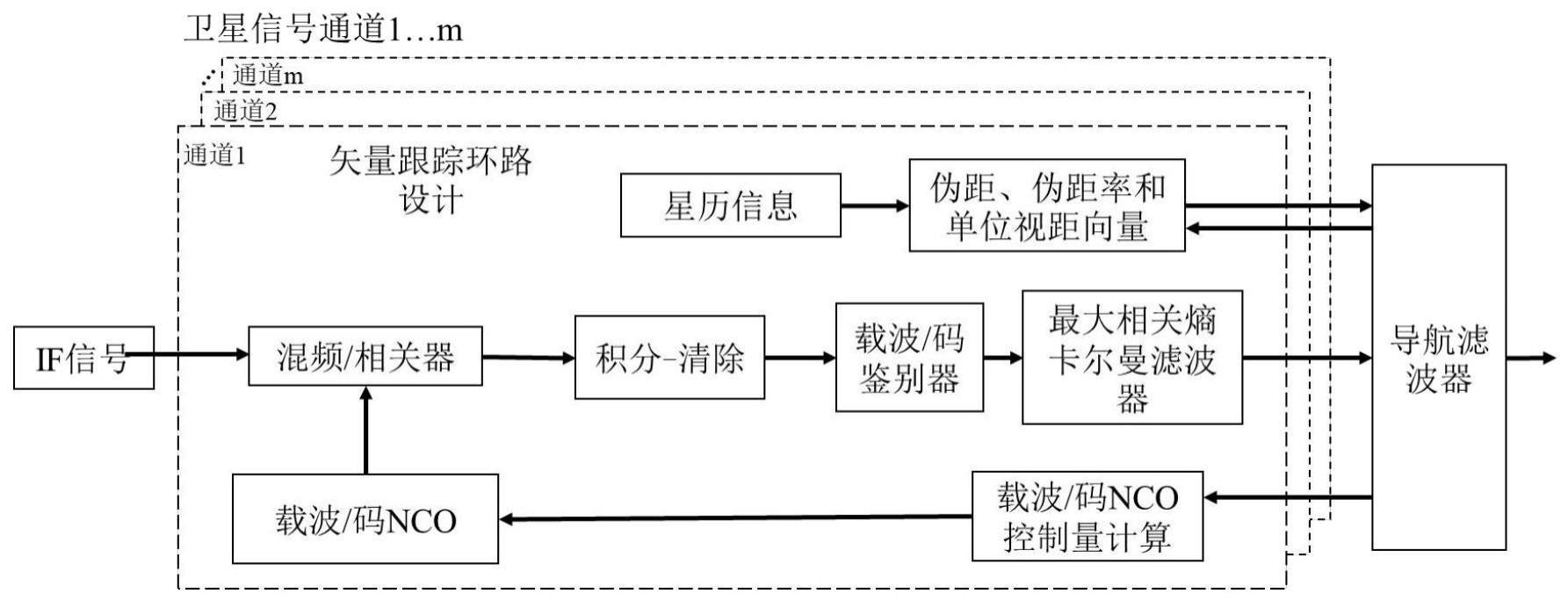
36、一种gnss接收机级联式矢量跟踪环路,包括:
37、混频/相关器,用于将if信号与本地复制的载波/码信号进行混频和相关处理,得出基带信号;
38、积分-清除模块,用于对混频/相关器输出的基带信号进行相干积分处理,得出相干积分值;
39、载波/码鉴别器,用于对积分-清除模块输出的相干积分值进行非相干积分处理,得出平均载波相位误差以及平均码相位误差;
40、预滤波器,用于将载波/码鉴别器输出的平均载波相位误差和平均码相位误差用作滤波的量测信息输入,对基带信号实施基于最大相关熵的卡尔曼滤波处理,得出载波频率误差以及码相位误差;
41、伪距、伪距率和单位视距向量模块,用于依据接收机位置信息以及卫星位置信息计算得出单位视距向量,依据单位视距向量计算得出导航滤波器量测矩阵,依据预滤波器输出的码相位误差和载波频率误差计算得出导航滤波器量测信息,其中包括伪距误差δρ与伪距率误差
42、导航滤波器,用于利用卫星的位置、速度和时间信息以及导航滤波器量测信息、单位视距向量和量测矩阵,来对gnss接收机基带信号进行卡尔曼滤波处理,从而得到gnss接收机及其载体的位置、速度以及时间信息。
43、进一步地,
44、预滤波器的状态向量是码相位误差δτ、载波相位误差δθ、载波频率误差δf以及载波频率变化率误差观测向量是码鉴别器输出和载波鉴别器的输出
45、在gnss接收机中,通道i的预滤波器的状态量为
46、
47、式中,δτi表示通道i的码相位误差,δθ表示通道i的载波相位误差,δf表示通道i的载波频率误差,表示通道i的载波频率变化率误差;
48、量测向量表示为
49、
50、式中,为通道i的平均码相位误差,为通道i的平均载波相位误差,矩阵右上角t表示矩阵的转置;
51、量测参数依据相干积分值,利用伪码、载波鉴别函数计算得到;码鉴别器为dll,载波鉴别器选择pll模式;平均码相位误差和平均载波相位误差分别采用非相干超前减滞后幅值法和二象限反正切函数进行计算:
52、
53、
54、式中,ip、qp、ie、qe、il、ql分别为相关器的即时、超前、滞后的同相支路和正交支路的相干积分输出;
55、gnss接收机环路预滤波器的线性离散系统如下
56、
57、式中,fk-1表示k-1时刻的状态转移矩阵,wk-1表示k-1时刻的系统噪声向量;hk表示k时刻的量测转移矩阵,vk表示k时刻的量测噪声向量;wk-1在k时刻的协方差矩阵为qk=e[wkwkt],vk在k时刻的协方差矩阵为rk=e[vkvkt];
58、环路最大相关熵卡尔曼滤波状态一步预测和状态均方误差一步预测如下:
59、
60、
61、式中,表示k时刻的先验状态估计,表示k-1时刻的后验状态估计,pk/k-1表示k时刻的先验估计协方差矩阵,pk-1表示k-1时刻的后验估计协方差矩阵;
62、量测更新如下:
63、
64、
65、pk=(i-kkhk)pk/k-1
66、式中,pk表示k时刻的后验估计协方差矩阵,i表示单位矩阵,表示经过mcc准则变换后得到的量测噪声协方差矩阵,且同时,量测噪声协方差矩阵rk可以表示为rk=diag([r1,r2]),具体计算如下:
67、
68、
69、式中,表示码相位误差的方差,表示载波相位误差的方差;c/n0为相应通道的载噪比。
70、进一步地,所述矢量跟踪环路还包括载波/码nco控制量计算模块和载波/码nco模块;
71、所述本地复制的载波/码信号,其是由载波/码nco控制量计算模块以及载波/码nco模块利用导航滤波器输出的位置、速度信息来获取的;
72、所述载波/码nco控制量计算模块利用导航滤波器输出的位置、速度信息,来产生码频率控制量以及载波频率控制量;
73、所述载波/码nco模块基于载波/码nco控制量计算模块得出的码频率控制量以及载波频率控制量,来更新频率控制字,控制本地载波信号和c/a码信号的生成,得到本地复制的c/a码信号与载波信号。
74、进一步地,所述积分-清除模块得出的相干积分值包括超前同相信号ie、即时同相信号ip、滞后同相信号il、超前正交信号qe、即时正交信号qp、以及滞后正交信号ql。
75、进一步地,
76、所述伪距误差通过公式
77、
78、来计算得出,
79、式中,表示卫星i在k时刻的伪距误差,δτi表示通道i的码相位误差,c表示光速,fca表示c/a码频率;
80、所述伪距率误差可以通过公式
81、
82、来计算得出,
83、式中,表示卫星i在k时刻的伪距率误差,表示通道i的载波频率变化率误差,c表示光速,fcode表示码频率(10.23mhz),fcarrier表示载波频率(1575.42mhz),vusr表示接收机的速度,表示卫星i的速度,li是表示gnss接收机与卫星i的单位视距向量,表示接收机钟漂,表示卫星钟漂;
84、量测矩阵表示为:
85、
86、代表在k时刻卫星i和接收机之间的视距向量,下标表示x,y,z三个方向。
87、本发明的矢量跟踪方法和矢量跟踪环路,其主要的创新之处在于,在矢量跟踪环路中设置一个预滤波器,其能够将平均载波相位误差以及平均码相位误差用作滤波的量测信息输入,对基带信号实施基于最大相关熵的卡尔曼滤波处理,其目的是为了解决在gnss信号受阻环境下的系统产生量测野值的问题,这样一来就可以解决原先的gnss信号受阻、跟踪失锁等技术问题,从而实现信号持续地、准确地跟踪,达到获得更精准的位置/速度信息的良好技术效果。
88、本发明的矢量跟踪方法和矢量跟踪环路相对现有技术,其有益效果在于:提高了矢量跟踪的鲁棒性,使gnss接收机在卫星信号遮挡环境、高动态等恶劣环境下能够实现较好的定位导航效果。
- 还没有人留言评论。精彩留言会获得点赞!