路网更新方法、装置、电子设备和存储介质与流程
本技术涉及地图或交通领域,具体涉及一种路网更新方法、装置、电子设备和存储介质。
背景技术:
1、近年来,随着计算机技术以及互联网技术的发展,智能驾驶在不同业务场景的应用落地,使得智能驾驶广受大众关注。其中,智能驾驶的实现非常依赖于对道路状况的识别结果,由于各种特殊的道路状况层出不穷,因此需要实时更新路网中的数据。
2、然而,目前路网中的数据主要是利用高精度的硬件采集到的高精度的点云数据来生成的,其对采集硬件要求很高,且不同时间内作业得到的数据需要通过算法进行拼接处理才能得到高质量的点云和各种路网属性信息。因此,导致路网中的数据受硬件以及硬件采集环境的影响较大,无法保证路网中数据的准确性。
技术实现思路
1、本技术实施例提供一种路网更新方法、装置、电子设备和存储介质,可以提升路网的高程信息的准确性。
2、本技术实施例提供一种路网更新方法,包括:
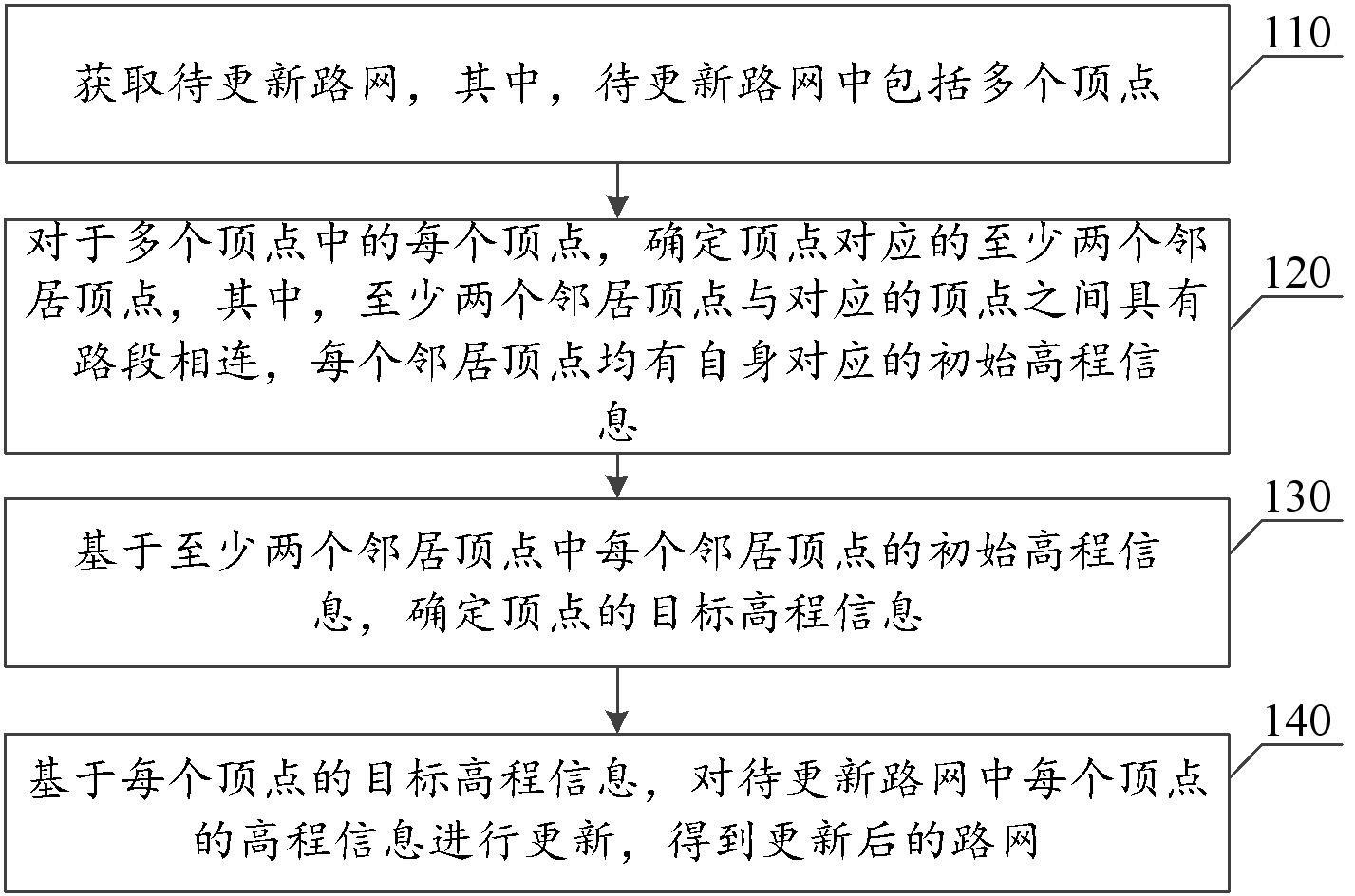
3、获取待更新路网,所述待更新路网中包括多个顶点;
4、对于所述多个顶点中的每个顶点,确定所述顶点对应的至少两个邻居顶点,其中,所述至少两个邻居顶点与对应的顶点之间具有路段相连,每个所述邻居顶点均有自身对应的初始高程信息;
5、基于所述至少两个邻居顶点中每个邻居顶点的初始高程信息,确定所述顶点的目标高程信息;
6、基于所述每个顶点的目标高程信息,对所述待更新路网中每个顶点的高程信息进行更新,得到更新后的路网。
7、本技术实施例还提供一种网更新装置,包括:
8、路网获取单元,用于获取待更新路网,所述待更新路网中包括多个顶点;
9、第一确定单元,用于对于多个顶点中的每个顶点,确定所述顶点对应的至少两个邻居顶点,其中,所述至少两个邻居顶点与对应的顶点之间具有路段相连,每个所述邻居顶点均有自身对应的初始高程信息;
10、第二确定单元,用于基于所述至少两个邻居顶点中每个邻居顶点的初始高程信息,确定所述顶点的目标高程信息;
11、更新单元,用于基于所述每个顶点的目标高程信息,对所述待更新路网中每个顶点的高程信息进行更新,得到更新后的路网。
12、在一些实施例中,第二确定单元,包括:
13、权重系数获取子单元,用于对每个所述顶点对应的邻居顶点进行权重系数运算处理,得到所述每个顶点对应的邻居顶点的目标权重系数;
14、目标高程信息获取子单元,基于所述至少两个邻居顶点中每个邻居顶点的初始高程信息和所述至少两个邻居顶点中每个邻居顶点的目标权重系数,进行加权求和处理,得到所述顶点的目标的高程信息。
15、在一些实施例中,更新单元,具体用于:
16、将所述多个顶点中目标高程信息与初始高程信息之间的差值大于或等于预设差值的顶点,确定为目标顶点,并将所述待更新路网中对应所述目标顶点的路段的高度调节至与所述目标高程信息对应的位置;
17、或,基于所述每个顶点的目标高程信息,对所述待更新路网中每个顶点进行分段线性拟合处理,得到所述更新后的路网。
18、在一些实施例中,所述路网更新装置,还包括:
19、提醒单元,用于在用户行驶过程中,若基于所述更新后的路网确定所述用户偏航行驶,则输出提醒信息;其中,所述提醒信息用于提醒用户已经偏航行驶。
20、在一些实施例中,所述路网更新装置,还包括:
21、导航路线获取单元,用于获取所述用户的导航路线;
22、路况信息获取单元,用于若确定所述导航路线包括目标对象,则获取所述目标对象的路况信息;其中,所述目标对象包括目标高架和目标路段,所述路况信息包括所述目标高架对应的高度范围和所述目标路段对应的坡度信息;
23、高度信息确定单元,用于基于所述更新后的路网,确定所述用户的高度信息,所述高度信息包括当前高度和所述用户的高度变化状态,所述高度变化状态包括高度上升状态或高度下降状态;
24、偏航确定单元,用于若确定所述当前高度不处于所述目标高架对应的高度范围内,或所述高度变化状态与所述目标路段对应的坡度信息不匹配的情况下,则确定所述用户偏航行驶。
25、在一些实施例中,第一确定单元,包括:
26、无向图构建子单元,用于构建与所述多个顶点对应的无向图;
27、第一输入子单元,用于将所述无向图输入至训练完成的图神经网络模型中,通过所述训练完成的图神经网络模型基于所述无向图,确定所述每个顶点对应的至少两个邻居顶点;
28、第二确定单元包括,包括:
29、输出子单元,用于通过所述训练完成的图神经网络模型,基于所述每个顶点对应的至少两个邻居顶点的初始高程信息,输出的所述每个顶点的目标高程信息。
30、在一些实施例中,该路网更新装置,还包括:
31、模型获取单元,用于获取图神经网络模型;
32、训练单元,用于对所述图神经网络模型进行训练,得到训练完成的图神经网络模型。
33、在一些实施例中,训练单元,包括:
34、训练顶点确定子单元,用于确定所述待更新路网中的每个顶点为训练顶点;
35、训练无向图构建子单元,用于基于所述训练顶点构建训练无向图;
36、第二输入子单元,用于将所述训练无向图输入至图神经网络模型;
37、邻居顶点确定子单元,用于针对每个训练顶点,通过所述图神经网络模型,确定所述训练顶点的对应的至少两个邻居顶点;
38、处理子单元,用于基于所述至少两个邻居顶点中每个邻居顶点的初始高程信息和所述至少两个邻居顶点中每个邻居顶点的权重系数,进行加权求和处理,得到所述训练顶点的更新后的高程信息;
39、目标损失值确定子单元,用于基于所述更新后的高程信息,确定目标损失值;
40、训练完成确定子单元,用于若确定所述目标损失值小于或等于预设损失值,则确定所述图神经网络模型训练完成。
41、在一些实施例中,训练单元,还包括:
42、更新子单元,用于若确定所述目标损失值大于预设损失值,则通过所述图神经网络模型对所述每个训练顶点对应邻居顶点的权重系数进行更新处理,得到更新后的权重系数;
43、迭代子单元,用于针对所述每个训练顶点,通过所述图神经网络模型基于所述训练顶点对应的更新后的权重系数和所述顶点的更新后的高程信息,返回执行:基于所述至少两个邻居顶点中每个邻居顶点的初始高程信息和所述至少两个邻居顶点中每个邻居顶点的权重系数,进行加权求和处理,得到所述训练顶点的更新后的高程信息的步骤,直到所述目标损失值小于或等于预设损失值,并确定所述图神经网络模型训练完成。
44、在一些实施例中,目标损失值确定子单元,包括:
45、第一损失值确定模块,用于基于所述每个训练顶点的更新后的高程信息和所述更新后的高程信息对应的更新前高程信息,确定第一损失值;其中,所述更新后的高程信息是其对应的更新前高程信息进行一次加权求和处理后得到的;
46、第二损失值确定模块,用于基于所述每个训练顶点的更新后的高程信息、所述每个训练顶点的邻居顶点的更新后的高程信息以及所述每个训练顶点对应的第一差值,确定第二损失值;其中,所述第一差值为训练顶点的初始高程信息与所述训练顶点的邻居顶点的初始高程信息之间的差值;
47、目标损失值确定模块,用于基于所述第一损失值和第二损失值,确定目标损失值。
48、在一些实施例中,第一损失值确定模块,具体用于:
49、针对所述每个训练顶点,确定所述训练顶点的更新后的高程信息与所述更新后的高程信息对应的迭代前高程信息之间的差值,得到每个训练顶点对应的第二差值;
50、对所述每个训练顶点对应的第二差值进行平方计算后进行求和处理,得到第一累加值;确定所述第一累加值与所述训练无向图中所有训练顶点的数量之间的商值,为所述第一损失值。
51、在一些实施例中,第二损失值确定模块,具体用于:
52、针对所述每个训练顶点,确定所述训练顶点的更新后的高程信息与所述训练顶点对应的邻居顶点的更新后的高程信息之间的差值,为所述训练顶点对应的第三差值;
53、计算所述每个训练顶点的第三差值与第一差值之间的差值,得到每个训练顶点的第四差值;
54、对所述每个训练顶点的第四差值进行平方计算后进行求和处理,得到第二累加值;
55、确定所第二累加值与待测路段的数量之间的商值,为所述第二损失值,其中,所述待测路段为所述待更新路网中的全部路段。
56、本技术实施例还提供一种电子设备,包括存储器存储有多条指令;所述处理器从所述存储器中加载指令,以执行本技术实施例所提供的一种路网更新方法中的步骤。
57、本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行本技术实施例所提供的一种路网更新方法中的步骤。
58、本技术实施例提供的路网更新方法中,可以先获取包括多个顶点的待更新路网,针对待更新路网的多个顶点中的每个顶点,将与所述顶点之间具有路段相连的至少两个其它顶点,确定为所述顶点对应的邻居顶点,其中,每个所述邻居顶点均有自身对应的初始高程信息。然后,再基于邻居顶点中每个邻居顶点的初始高程信息,确定所述顶点的目标高程信息。最后,基于所述每个顶点的目标高程信息,对所述待更新路网中每个顶点的高程信息进行更新,得到更新后的路网。
59、在本技术实施例中,由于顶点对应的至少两个邻居顶点与该顶点之间具有路段相连,所以该顶点与其对应的邻居顶点在高度上是具有相关性的,然后,再基于所述至少两个邻居顶点中每个邻居顶点的初始高程信息,确定所述顶点的目标高程信息,从而能够依据该顶点周围的与其有高度相关的邻居顶点的初始高程信息,确定出该顶点的目标高程信息,即从路网全局的高程信息去确定单个待测顶点的高程信息,减少了通过硬件对每个待测顶点的高程信息进行单独采集时,由硬件以及采集环境的影响。最后,再基于所述每个顶点的目标高程信息,对所述待更新路网中每个顶点的高程信息进行更新,得到更新后的路网,由此,提升了更新后的路网中高程信息的准确性。
- 还没有人留言评论。精彩留言会获得点赞!