一种基于差分传感器阵列的高精度姿态测量系统的制作方法
本发明涉及导航,更具体地说,本发明涉及一种基于差分传感器阵列的高精度姿态测量系统。
背景技术:
1、近年来,物联网(internet of things,iot)、虚拟现实(virtual reality,vr)、无人驾驶飞机(unmanned aerial vehicle,uav)技术飞速发展,这些技术的实现都需要获取姿态信息并加以处理,因此姿态测量在这些技术中有着重要的地位。
2、姿态测量技术通常通过微机电系统(micro-electro-mechanical system,mems)传感器测量物理信号,利用牛顿力学原理进行数据采集并通过特定算法计算载体姿态角。通常是利用加速度计、磁力计和陀螺仪等惯性器件测量载体的原始运动数据,然后利用相应的算法求解载体的姿态信息。近些年随着半导体和微电子行业的蓬勃发展,基于微机电系统的惯性传感器的制造工艺和性能得到了显著提升,使传感器的输出精度得到大幅提升,因此mems广泛应用在姿态测量技术中。
3、同时姿态测量还要求一套从传感器输出数据进行数据融合从而实现高精度姿态解算。通常传感器输出的数据包含加速度计、陀螺仪、磁力计,还有统也包含了气压计和温度计等,每种传感器的输出数据解算的结果可能都不尽相同,因此需要一种算法来融合并最大化利用惯性传感器输出的数据,从而得到最佳的姿态估计。传统的姿态解算算法包含卡尔曼滤波、互补滤波,同时卡尔曼滤波也拥有众多改进算法,包含快速卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波等。
4、现有的姿态测量系统由于仅采用一个传感器采集数据,测量仪器输出精度低,不适用于对现有姿态测量精度的要求。而采用更高精度的传感器会导致成本的大幅上升,维护困难。
5、从医疗决策辅助系统到组合导航系统,许多工程学科已经认识到采用多个传感器可提高获取物体信息的准确性。智能时钟提高了时钟的准确性或稳定性,或者通过与外部标准进行比较来对其进行表征。实际上,该技术采用了多个传感器的数据融合来提高精度。因此,通过增加传感器个数来提升系统的整体性能是可能的。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种基于差分传感器阵列的高精度姿态测量系统,本发明所要解决的技术问题是:现有的姿态测量系统一般都是采用单个传感器进行姿态解算,噪声较大,测量精度不高,并且单纯提高传感器精度所需成本极大。
2、为实现上述目的,本发明提供如下技术方案:一种基于差分传感器阵列的高精度姿态测量系统,包括电源与通信接口、物理层、数据链路层与应用层,其中具体的:
3、电源与通信接口:电源与通信接口采用可靠性高的微型矩形电连接器j30j(9针),该连接器可以工作在-55摄氏度至+125摄氏度之间,能适用于各种等恶劣环境,接触电阻小于10毫欧姆,绝缘电阻大于5000兆欧姆,对信号传输影响较小;
4、为了提高系统的稳定性,采用两路电源,每路电源占用两个针脚,在一路电源中断的情况下也能够正常工作;为了防止在某路电源失效时电流倒灌入,在电源输入处加入二极管,在系统正常工作时,二极管导通,电源正常供电,当任何一路电源失效时,由于二极管的导通特性,此时二极管工作在反向截止状态,电流无法通过,从而保护失效电源,并防止有效电源短路;
5、通信接口占用四个针脚,分别用于接收和发送的两路差分信号;
6、传感器阵列摆放方式:两导线上的干扰电流振幅相等,方向相反称为差模干扰,而方向相同者称为共模干扰,在传感器中也会出现类似的干扰;因此惯性传感器共使用8个,同时将这8个陀螺仪分为两组,两组陀螺仪摆放方向相反,每组内用于降低差模干扰,两组结合降低共模干扰,其中u2、u6、u3、u9正向摆放,而u8、u11、u10、u7反向摆放;
7、传感器阵列数据融合算法:由于传感器阵列中传感器的摆放方式不尽相同,因此需要使用特定的传感器阵列数据融合算法来整合不同方向的传感器输出数据;该融合算法如下式所示,其中x,y,z分别为传感器各个轴输出的数据,n为传感器个数:
8、x融合=∑xi/n
9、y融合=∑yi/n
10、z融合=∑zi/n
11、物理层:为了增强信号传输的稳定性和抗干扰能力,物理层通信协议采用rs-422;由于rs-422传输差模信号,抗干扰能力强,相较于rs232最多传输15米,rs-422最远能传输1200米;rs422采用2线全双工差分的传输方式,它采用平衡传输采用单向/非可逆,有使能端或没有使能端的传输线;和rs-485不同的是eia-422不允许出现多个发送端而只能有多个接受端;硬件构成上rs-422相当于两组rs-485,即两个半双工的rs-485构成一个全双工的rs-422;
12、数据链路层与应用层:在数据链路层采用通用异步接收/发送(universalasynchronous receiver/transmitter,uart);在应用层使用特殊的数据包格式。
13、在一个优选的实施方式中,所述物理层中rs422输出的是差分信号,因此通过专用的转换芯片将mcu输出的串口信号转换为rs-422对应的电平信号。
14、在一个优选的实施方式中,所述数据链路层与应用层中为了满足数据传输速度的要求,选择的波特率为115200,停止位为1位,无奇偶校验。
15、在一个优选的实施方式中,所述应用层使用的特殊的数据中data数据内容中的数据采用小端模式,即低字节在前,高字节在后;为了保证传输的正确性,在每个数据包的结尾加入和校验和附加校验。
16、在一个优选的实施方式中,所述和校验的计算方法为:从帧头0xaa字节开始,一直到data区结束,对每一字节进行累加操作,只取低8位;附加校验的计算方法为:计算和校验时,每进行一字节的加法运算,同时进行一次sum check的累加操作,只取低8位;目标地址默认为0xff,支持的功能码范围从0x01至0x04,分别用于传输加速度与陀螺仪、磁力计与温度、欧拉角、四元数。
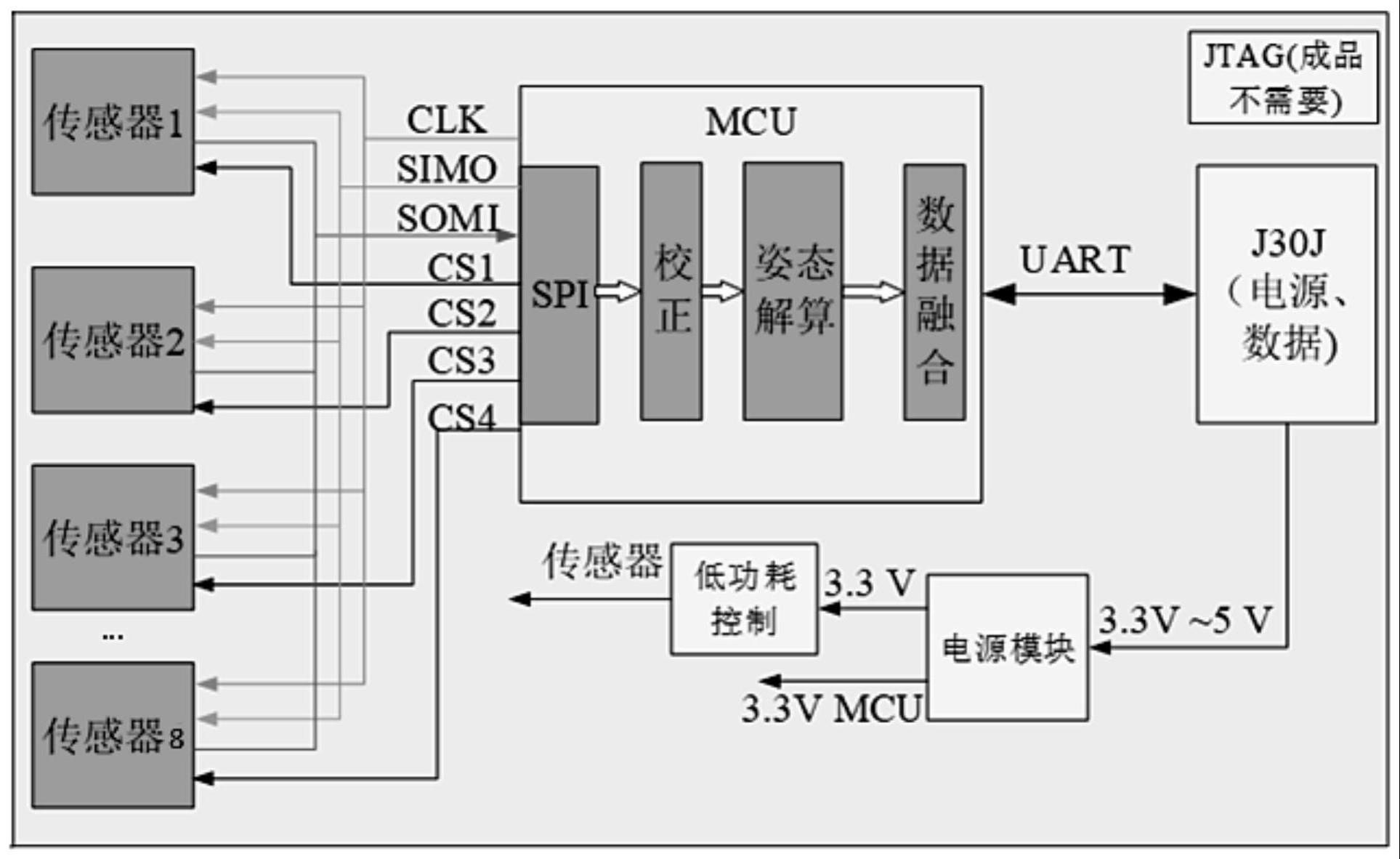
17、在一个优选的实施方式中,所述物理层中包括mcu,mcu实现数据采集与处理:mcu用于实现从惯性传感器中获取数据并采用特定数据融合算法计算姿态,最后将处理完成的数据传回上位机;使用的是华大半导体的hc32f460系列单片机,采用的是arm的m4内核,主频高达200mhz,并且拥有丰富的外设用于数据采集与通信;由于算法的复杂性与数据输出实时性的要求,最终选择了这款mcu;物理层还包含使用spi配置和读取惯性传感器寄存器,通过融合算法对原始传感器数据进行姿态解算,并通过专用数据包格式透过串口与模块外部进行数据交换;
18、在系统复位后首先会初始化mcu内部相关寄存器,将时钟设置为200mhz,并将mcu配置为高性能模式;然后初始化用于通信的外设,包含spi与串口,并检测与传感器通信是否正常;随后与传感器进行通信并设置和读取相应寄存器,复位传感器并使能加速度计、陀螺仪,并使用内部iic总线与传感器内部磁力计通信,配置相关寄存器并获取校准参数;随后将进行校准,此时需要将设备放置在水平表面并静置一段时间,校准完成后将校准参数储存在mcu内部;校准完毕后正常输出角度值,在读取数据的过程中使用两个dma的八个通道分别控制四个spi接收与发送的寄存器;dma读取完毕后通知cpu在缓存区域取回数据,从而减少中断次数,减轻cpu负担。
19、本发明的技术效果和优点:
20、本发明通过使用多个惯性传感器组成传感器阵列,实现传感器阵列的数据采集,并使用mcu实现了专用的数据融合算法,将传感器输出的数据转化为四元数和欧拉角,并通过rs-422协议传回上位机,实现姿态实时测量。
- 还没有人留言评论。精彩留言会获得点赞!