一种磁浮飞行风洞磁浮平台气动与运动力学耦合分析方法与流程
本发明涉及磁浮飞行风洞领域,具体地,涉及一种磁浮飞行风洞磁浮平台气动与运动力学耦合分析方法。
背景技术:
1、在航空航天领域,各类先进的军民用航空航天飞行器发展必然给国防安全和社会经济带来巨大变化,同时也面临量新的空气动力学问题需要攻关突破如高速气动力精确预测及一体化设计、湍流减阻、边界层转捩、地面效应等基础和前沿问题都强烈依赖于风洞试验,而且对风洞的流场动态特性、低扰动特性以及特种模拟能力提出了更高的要求,传统风洞设备越来难以满足日益特殊空气动力试验需求。除此之外,在先进轨道交通领域,磁浮真空管道超高速列车等先进轨道交通技术已经是重点研发方向。真空管道列车面临着复杂的激波边界层干扰、超声速气动减阻、管道激波反射、活塞效应等一系列复杂的空气动力学问题,必须要在风洞中加以解决。目前,传统跨超声速风洞存在试验段尺寸(长度及截面积)和气流相对运动带来的模拟真实性不足等问题,难以解决受限空间内超高速列车的空气动力特性及其力/热/结构/控制耦合的科学问题。
2、“飞行风洞”的概念最早由美国研究者在上世纪90年代所提出,具备“体动风静”的特殊运行方式和性能优势。nasa- langley research center在较早以前就开始关注这一全新概念的地面试验设备,称之为高升力飞行风洞(high-lift flight tunnel),并开展了三期关键技术的研究和论证规划工作,由于该设备设计建设相关的关键技术攻关难度较高,因此,nasa- langley research center至今仍未取得较明显的进展。磁浮飞行风洞是一种“体动风静”运行模式的新概念空气动力试验设备,其中磁浮平台是用于搭载试验模型,实现悬浮隔振、驱动控制模型运动、减速制动以模拟真实运行状态的关键组成部分。在长直线密闭管道中高速运动过程的气动特性复杂,涉及到波系传播形成的气动力和电磁悬浮力的共同作用。
3、磁浮技术的限制磁浮飞行风洞是利用真空管道列车概念结合动模型试验技术提出的一种新概念风洞设备,其原理是在一段封闭的直线长管道内安装磁浮驱动模型运动机构,利用电磁悬浮、牵引和导向技术驱动模型高速运动,模拟各类飞行器及高速列车运动的物理过程,构建接近真实飞行环境和运动特点的“体动风静”的试验状态,可以满足航空航天飞行器、高速列车等宽马赫数范围、宽雷诺数范围、低噪声、低湍流度、高真空度(高空)、特殊气体介质、受限空间条件下的空气动力学及其交叉学科地面试验需求。
4、磁浮飞行风洞采用高速运行的磁浮平台驱动试验模型在等截面、直线、密闭管道内做加速、匀速及减速运动,通过改变磁浮平台的加速度及加速时间来实现运行马赫数的精确调节和控制,可以模拟试验模型的快速加速/减速过程及速度急剧变化时的气动现象。试验过程中,风洞内磁浮平台高速运动过程所产生的气动力和声波的传播十分复杂,同时电磁悬浮的磁浮平台在复杂非稳定的气动载荷作用下将产生运动力学状态改变,磁浮平台的运动力学和空气动力学将相互耦合。
5、传统空气动力学仿真和运动力学计算分析方法在处理此类耦合问题还存在一定的局限性。传统方法将运动力学计算和空气动力学计算分别求解,两个计算模块间相互按一定的计算步骤传输数据实现联合耦合求解,并且计算时间很长,试验过程中,风洞内模型高速运动过程所产生的气动力和声波的传播十分复杂,存在正激波、斜激波和反射激波等复杂波系。复杂的流场特性会导致悬浮运行的磁浮平台运动力学特性发生改变,变化的运动特性又将对流场特性产生影响。因此,磁浮平台在密闭管道内高速运动过程所受到的气动特性与运动特性之间存在耦合效应,属于运动力学和空气动力学的耦合问题。现有技术在处理运动力学和空气动力学耦合时,一般采用接口程序实现两个计算模块的数据交换,在一个模块计算的过程中另一个模块基本都在等待参数的状态中。同时空气动力学计算的时间步长和运动力学计算的时间步长存在数量级的差异,会导致运动力学计算较长时间处于等待状态,严重影响计算的效率。此外由于是给定一定时间步长进行迭代,空气动力学计算迭代步长相对运动力学计算迭代步长较长,导致空气动力学计算得到的气动载荷变化在两个输出的迭代步之间存在较大变化,可能会导致运动力学计算在突变输入下计算不收敛。
技术实现思路
1、本发明目的为提高磁浮飞行风洞磁浮平台气动与运动力学耦合分析的计算效率和精度。
2、为实现上述发明目的,本发明提供了一种磁浮飞行风洞磁浮平台气动与运动力学耦合分析方法,所述方法包括:
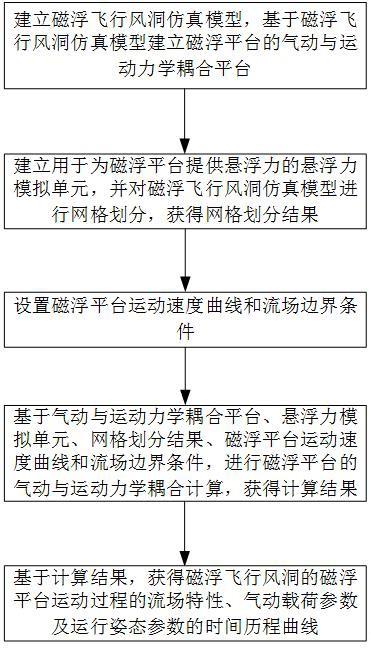
3、步骤1:建立磁浮飞行风洞仿真模型,基于磁浮飞行风洞仿真模型建立磁浮平台的气动与运动力学耦合平台;
4、步骤2:建立用于为磁浮平台提供悬浮力的悬浮力模拟单元,并对磁浮飞行风洞仿真模型进行网格划分,获得网格划分结果;
5、步骤3:设置磁浮平台运动速度曲线和流场边界条件;
6、步骤4:基于气动与运动力学耦合平台、悬浮力模拟单元、网格划分结果、磁浮平台运动速度曲线和流场边界条件,进行磁浮平台的气动与运动力学耦合计算,获得计算结果;
7、步骤5:基于计算结果,获得磁浮飞行风洞的磁浮平台运动过程的流场特性、气动载荷参数及运行姿态参数的时间历程曲线。
8、由于本方法建立了磁浮飞行风洞仿真模型及气动与运动力学耦合平台,因此本发明可以实现磁浮飞行风洞磁浮平台的气动与运动耦合分析计算的同空间和时间化处理,相比于传统计算方法相比,可以实现磁浮平台运行的流场计算和运动力学计算同时间步和空间场计算。
9、采用本方法有效统一磁浮平台运动空气动力学计算和运动力学计算的计算步长,基于同平台计算,避免了运动力学计算等待的情况,提高计算效率。此外本方法由于空气动力学计算输出载荷与运动力学计算同步进行,避免了气动载荷输入动力学计算突变导致计算不收敛的问题,提高了运动力学计算的精度。在磁浮平台空气动力学计算中实时引入磁浮平台的运动力学导致的运行姿态变化将可以使流场特征计算更加准确,提高流场特性分析的准确性。
10、进一步的,磁浮飞行风洞仿真模型包括:磁浮飞行风洞管道,磁浮飞行风洞管道内设有轨道,轨道上悬浮有可在轨道上方运动的磁浮平台,磁浮平台用于携带试验模型在磁浮飞行风洞管道内移动。
11、进一步的,所述步骤1具体包括:
12、步骤1.1:根据磁浮平台结构外形和磁浮飞行风洞管道参数绘制磁浮飞行风洞仿真模型结构图;
13、步骤1.2:基于磁浮飞行风洞仿真模型结构图,设置磁浮平台为运动固体域,设置磁浮飞行风洞管道内其余部分为流体域,建立磁浮飞行风洞仿真模型;
14、步骤1.3:在流体域中进行流场特性分析设置,包括流场密度、粘度和温度参数设置以及湍流模型设置;
15、步骤1.4:基于磁浮飞行风洞仿真模型建立气动与运动力学耦合平台,设置流体域压力条件实时作用于运动固体域边界,运动固体域边界为流体计算的动态边界;
16、步骤1.5:采用拉格朗日方法对流体域进行描述,采用欧拉方法对运动固体域进行描述。
17、进一步的,步骤2中对磁浮飞行风洞仿真模型网格划分包括:
18、首先,根据流场特性设置磁浮飞行风洞管道内流体域网格大小及根据磁浮平台结构特性设置运动固体域网格大小;然后设置边界层参数,然后选择网格类型进行网格划分,根据流场特性设置合适的网格大小,在保证计算精度的同时实现最高计算速度。
19、进一步的,步骤3具体包括:
20、步骤3.1:设置磁浮平台运动速度曲线;
21、步骤3.2:设置磁浮飞行风洞管道流体域进出口及壁面边界条件;
22、步骤3.3:设置磁浮平台为磁浮飞行风洞管道流体域的内部运动边界。
23、其中,对磁浮平台速度进行定义便于模拟实际试验工况,设置流体域边界条件和内部运动边界均便于开展流体分析。
24、进一步的,步骤4包括:
25、步骤4.1:基于网格划分结果、磁浮平台运动速度曲线和流场边界条件,计算获得流场的流速;
26、步骤4.2:根据流场的流速计算得到运动固体域受到的气动力矩阵;
27、步骤4.3:基于悬浮力模拟单元获得作用于磁浮平台的悬浮力,基于悬浮力和气动力矩阵计算得到运动固体域的运动特性参数;
28、步骤4.4:判断是否到达终点计算时刻,若到达则执行步骤4.5;若未到达,则基于步骤4.3计算得到的运动固体域的运动特性参数更新流场边界条件并返回执行步骤4.1;运动特性参数包括x、y和z轴三个方向的平动以及x、y和z轴三个方向转动的速度和位移参数;
29、步骤4.5:终止计算,获得计算结果。
30、进一步的,步骤5包括:
31、步骤5.1:根据计算结果生成流场特性参数结果,包括速度场信息和压力场信息;
32、步骤5.2:根据计算结果分析获得磁浮平台受到的气动载荷和运行姿态参数的时间历程结果。
33、进一步的,气动力矩阵的计算方式为:
34、;
35、;
36、其中,f为流场对磁浮平台产生的气动载荷,∇为哈密尔顿算子、∇ufluid为流场速度梯度,∇·ufluid为流场的速度散度, p表示压力, μ表示流体粘度, t表示温度,n表示交界面外法向,i表示特征矩阵,ffluid为流场对磁浮平台作用的气动力矩阵,d v和d v分别表示网格单元的空间框架和材料框架的缩放因子。
37、进一步的,磁浮平台的速度计算方式为:
38、;
39、其中,usolid为磁浮平台的速度,∂xsolid为磁浮平台位移的导数,∂ t为时间的导数。
40、进一步的,采用以下公式计算得到运动固体域的运动特性参数:
41、;
42、其中,msolid表示磁浮平台的质量矩阵,csolid表示磁浮平台的阻尼矩阵,ksolid表示磁浮平台的刚度矩阵,faction表示悬浮力。
43、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
44、本发明能够提高磁浮飞行风洞磁浮平台气动与运动力学耦合分析的计算效率和精度。
- 还没有人留言评论。精彩留言会获得点赞!