一种连续梁桥施工用工艺辅助测定方法与流程
本发明涉及连续梁桥,特别涉及一种连续梁桥施工用工艺辅助测定方法。
背景技术:
1、连续梁桥是一种桥梁结构,其特点是在跨越河流、道路或其他地形障碍时具有连续的跨度施工结构。由于其设计跨度较大,连续梁桥在施工过程中常常会面临垂度扰度问题。
2、垂度扰度是指由于连续梁桥在施工过程中,因施工段暂未施工完成,部分施工段悬浮于空中而底部无支撑结构的状态下,因其自重和施工荷载等因素导致的桥梁在施工过程中产生的变形,主要表现为梁的垂直位移和倾斜。这种变形会对桥梁的结构稳定性和使用安全性产生负面影响。
3、为了检测和监测连续梁桥施工过程中的垂度扰度问题,现有的技术的解决方式通常是采用连续光学仪器在施工过程中进行定期测量,并将数据反馈至施工决策人员作为参考,并进一步确定修复与维护决策。这些光学仪器可以在不同的施工时间段对桥梁进行测量,获取变形数据,并通过分析和比对来判断桥梁的稳定性和变形情况。
4、然而,现有技术中采用连续光学仪器进行测量存在一些缺点。因连续梁桥的体积大、跨度大,该方法需要在不同时间段及不同的施工段对桥梁进行多次测量,但光学测量只能提供离散的测量数据,对于桥梁变形的连续监测有一定的限制。此外,仅仅依靠光学测量无法提供即时的变形状态估计,限制了对桥梁变形过程的实时监测能力。
5、为此,提出一种连续梁桥施工用工艺辅助测定方法。
技术实现思路
1、有鉴于此,本发明实施例希望提供一种连续梁桥施工用工艺辅助测定方法,以解决或缓解现有技术中存在的技术问题,即离散的测量数据存在一定的限制,并对此至少提供一种有益的选择;
2、本发明实施例的技术方案是这样实现的:
3、第一方面
4、一种连续梁桥施工用工艺辅助测定方法,在传统光学测量的基础上,进一步提供一种统合型的控制框架,通过元胞自动机、卡尔曼滤波、支持向量机和遗传算法的配合,可以实现对连续梁桥施工过程中的垂度扰度问题进行更准确和实时的监测与预测。这个综合算法结合了桥梁行为和变形情况的元胞状态更新规则,利用卡尔曼滤波对局部变形状态进行估计,通过支持向量机进行异常检测,并通过遗传算法优化线形控制策略,以减小变形量并提高结构稳定性。
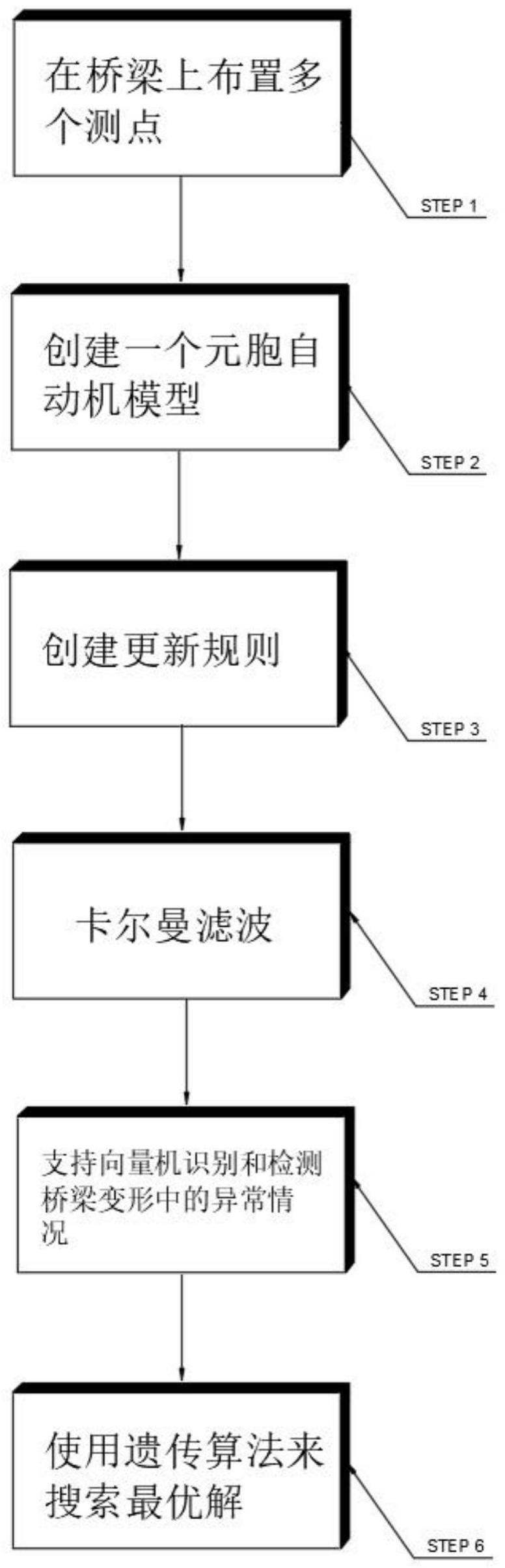
5、上述的测定方法的逻辑如下:
6、step1:在桥梁上布置多个测点,并使用多个光学仪器同时进行测量,获取桥梁不同位置的变形数据。
7、在上述的实施方式中,为了对连续梁桥的垂度扰度问题进行监测,需要在桥梁上布置多个测点,并使用光学仪器进行测量。这些测点覆盖了桥梁的不同位置,可以获取到桥梁在施工过程中的变形数据。
8、需要指出的是,通过在桥梁上布置多个测点,并使用多个光学仪器进行测量,可以获取到桥梁不同位置的变形数据。这些光学仪器可以通过光学传感器等技术手段对桥梁进行测量,获取到位移、倾斜和挠度等变形数据。
9、step2:创建一个元胞自动机模型,其中每个元胞代表桥梁的一个位置。
10、在上述的实施方式中,为了对桥梁的行为和变形情况进行建模和分析,需要创建一个元胞自动机模型,其中每个元胞代表桥梁的一个位置。
11、需要指出的是,元胞自动机是一种基于离散空间和时间的建模方法,其中每个元胞表示系统的一个局部状态。在这个步骤中,本发明将桥梁划分为若干个位置,每个位置对应一个元胞。元胞之间通过邻居关系进行交互和状态更新。
12、step3:根据桥梁的行为和变形情况,结合元胞的位置、邻居元胞的状态、材料特性和外部负载的因素,通过线性函数描述元胞的状态更新规则。
13、在上述的实施方式中,为了准确描述桥梁元胞的状态更新规则,需要考虑桥梁的行为和变形情况,以及元胞位置、邻居元胞的状态、材料特性和外部负载等因素。
14、需要指出的是,在元胞自动机模型中,每个元胞的状态更新规则是通过考虑桥梁的行为和变形情况,并结合元胞的位置、邻居元胞的状态、材料特性和外部负载等因素,使用线性函数来描述的。
15、cellstate(t+1)=f(cellstate(t),neighborstates(t),bridgeproperties,externalload)
16、其中,cellstate(t)表示元胞在时刻t的状态,neighborstates(t)表示邻居元胞在时刻t的状态,bridgeproperties表示桥梁的材料特性,externalload表示外部负载。函数f表示线性函数关系,用于计算元胞在下一个时刻的状态。
17、step4:对于每个元胞:将桥梁的局部变形状态定义为卡尔曼滤波的问题,对测量数据进行滤波并获得桥梁变形状态测定。
18、在上述的实施方式中,为了对桥梁的局部变形状态进行测定,需要将局部变形状态定义为卡尔曼滤波的问题,并对测量数据进行滤波处理。
19、需要指出的是,卡尔曼滤波是一种用于估计系统状态的滤波方法,通过融合系统的动态模型和测量数据,可以得到对系统状态的最优估计。在这个步骤中,对于每个元胞,将桥梁的局部变形状态定义为卡尔曼滤波的问题,并使用测量数据进行滤波处理,得到桥梁的变形状态测定。
20、卡尔曼滤波算法公式可以表示为:
21、stateestimation(t+1)=a*stateestimation(t)+b*controlinput(t)
22、measurementestimation(t)=c*stateestimation(t)
23、kalmangain(t)=p(t)*c^t*(c*p(t)*c^t+r)^(-1)
24、stateestimation(t+1)
25、=stateestimation(t)+kalmangain(t)*(measurement(t)-measurementestimation(t))
26、p(t+1)=(i-kalmangain(t)*c)*p(t)
27、其中,stateestimation(t)表示在时刻t的状态估计,measurement(t)表示在时刻t的测量值,a和b是状态转移矩阵,c是测量矩阵,controlinput(t)是控制输入,p(t)是状态协方差矩阵,r是测量噪声协方差矩阵,i是单位矩阵。
28、step5:对于每个元胞:使用滤波后的数据,结合使用支持向量机将测点的位置、形状和材料特性信息作为特征向量;识别和检测桥梁变形中的异常情况。
29、在上述的实施方式中,为了识别和检测桥梁变形中的异常情况,需要使用滤波后的数据,并结合使用支持向量机来进行异常检测,利用测点的位置、形状和材料特性信息作为特征向量进行分类。
30、需要指出的是,支持向量机是一种机器学习算法,可以用于分类和回归问题。在这个步骤中,对于每个元胞,使用滤波后的数据作为输入,将测点的位置、形状和材料特性信息作为特征向量,通过训练支持向量机模型,可以对桥梁的变形情况进行分类,识别和检测异常情况。
31、step6:对于每个元胞:使用滤波后的数据,结合定义桥梁线形控制策略问题,使用遗传算法来搜索最优解,遗传算法通过循环迭代,寻找最优线形控制策略。
32、在上述的实施方式中,为了确定桥梁的最优线形控制策略,需要使用滤波后的数据,并结合遗传算法进行搜索,以找到最优解。
33、需要指出的是,遗传算法是一种优化算法,通过模拟自然界的进化过程,通过选择、交叉和变异等操作,不断优化问题的解。在这个步骤中,对于每个元胞,使用滤波后的数据作为输入,结合定义的桥梁线形控制策略问题,使用遗传算法来搜索最优解,通过循环迭代的方式逐渐优化线形控制策略,以达到最优的桥梁形态。
34、第二方面
35、一种计算机设备,所述计算机设备包括处理器、与所述处理器耦接的存储器,所述存储器中存储有程序指令,所述程序指令被所述处理器执行时,使所述处理器执行如上述所述的测定方法。
36、该计算机设备是一种用于执行上述step1~6测定方法的设备。它包括以下主要组件:
37、(1)处理器:计算机设备配备了一种处理器,用于执行指令并控制设备的操作。处理器负责执行后的step1~6测定方法中的算法,处理测量数据,进行状态更新、滤波、异常检测和优化控制等计算操作。
38、(2)存储器:计算机设备与处理器耦接的存储器用于存储程序指令和数据。存储器中存储了后的step1~6测定方法所需的程序指令,包括元胞自动机模型的创建、状态更新规则的定义、卡尔曼滤波的实现、支持向量机的训练和分类、遗传算法的搜索等。
39、(3)输入和输出接口:计算机设备还包括输入和输出接口,用于与外部设备进行数据交互。通过输入接口,测量数据可以输入到计算机设备中,供处理器进行处理。通过输出接口,计算机设备可以将处理结果输出到外部设备,如显示器或其他数据存储设备。
40、通过配备处理器和存储器,并执行所存储的程序指令,该计算机设备能够自动执行后的step1~6测定方法,实现桥梁变形的监测和控制。它提供了高效、准确、自动化的桥梁变形测定方案,并能根据实际需求进行灵活的参数设置和优化调整,帮助确保桥梁的结构安全性和运行稳定性。
41、第三方面
42、一种存储介质,存储有能够实现如上述所述的测定方法的程序指令。
43、该存储介质是一种用于存储能够实现后的step1~6测定方法的程序指令的介质。它可以是各种类型的非易失性存储器,如硬盘驱动器、固态硬盘、闪存驱动器等,或者是可编程存储器,如闪存芯片、eeprom芯片等。
44、在该存储介质中,存储有经过编写和编译的程序指令,这些指令描述了后的step1~6测定方法中的各个步骤和算法。具体而言,存储介质中存储有元胞自动机模型的创建过程、元胞状态更新规则的定义、卡尔曼滤波的实现方法、支持向量机的训练和分类算法、遗传算法的搜索过程等。
45、通过将存储介质与计算机设备或其他可执行设备连接,程序指令可以从存储介质中读取,并由设备的处理器执行。这样,存储介质提供了一种便捷的方式,使得能够实现后的step1~6测定方法的程序指令能够被计算机设备或其他可执行设备识别和执行。
46、该存储介质的使用使得实施后的step1~6测定方法更加方便和灵活。通过更新存储介质中的程序指令,可以实现算法的改进和优化,以适应不同的桥梁监测需求和技术发展。同时,存储介质的可靠性和稳定性也能保证程序指令的安全存储和读取,以确保测定方法的可靠性和准确性。
47、与现有技术相比,本发明的有益效果是:
48、一、实时监测和预警能力:通过元胞自动机模型和相关算法的运用,可以实时对桥梁的变形状态进行监测和分析。这种实时监测能力使得问题可以在早期被发现和识别,从而及时采取相应的措施进行修复或维护,以防止潜在的安全风险。
49、二、自动化数据处理和分析:通过卡尔曼滤波、支持向量机和遗传算法等算法的应用,可以对测量数据进行自动化的处理和分析。这种自动化处理和分析的能力极大地提高了数据的利用效率和准确性,减少了人为干预的错误和主观性,提高了整体的数据处理效率。
50、三、故障检测和线形控制的优化:通过异常检测算法和遗传算法的应用,可以及时识别和检测桥梁变形中的异常情况,并采取相应的线形控制策略。这样可以提高桥梁的安全性和稳定性,优化线形控制策略,减少了人为因素和主观判断的影响。
51、四、全面性和准确性的测量:通过布置多个测点并使用多个光学仪器同时进行测量,可以获取桥梁不同位置的变形数据。这样的测量方法可以提供全面性和准确性的数据,更好地了解桥梁的变形情况。
52、与现有技术相比,本发明解决了传统技术的缺陷如下:
53、一、传统测量方法的局限性:传统方法往往只能采用有限的测点进行测量,导致无法全面了解桥梁的变形情况。而本发明的测量方法通过多点测量和多仪器协同工作,解决了这一缺陷,提供了更全面、准确的数据。
54、二、人工处理和分析的限制:传统方法需要人工对数据进行处理和分析,存在主观性和人为干预的问题。而本发明的数据处理和分析算法的应用,实现了自动化处理和分析,提高了数据的准确性和利用效率。
55、三、缺乏实时监测和预警能力:传统方法往往缺乏实时监测和预警能力,无法及时发现和识别桥梁变形的异常情况。而本发明的算法和模型的应用,实现了实时监测和预警,提高了安全性和维护效率。
- 还没有人留言评论。精彩留言会获得点赞!