面向城市交通的定位数据质量控制方法、装置及存储介质与流程
本发明涉及定位,尤其涉及一种面向城市交通的定位数据质量控制方法、装置及存储介质。
背景技术:
1、智能驾驶是未来交通领域解决道路拥堵、事故频发等问题重点方向,北斗/全球卫星导航系统gnss高精度定位是智能驾驶的重要组成元素,其核心任务是实时获取车辆高精度、高可靠性的位置信息。
2、相比一般导航定位,面向城市车辆交通的定位导航有特殊的难度:一方面,卫星信号被建筑物、树木、移动体等反射或干扰遮挡频发,极易引发观测数据产生周跳或粗差,如不即时处理将导致定位不连续;另一方面,车端算力有限,频繁处理周跳或粗差将较大占用算力资源,挤压其他进程算力空间。因此,车端的北斗/gnss实时数据质量控制成为直接影响其实时高精度定位精度和可靠性的关键环节,亟需提供一种可应对城市交通的定位数据质量控制方式。
技术实现思路
1、本发明实施例的目的是提供一种面向城市交通的定位数据质量控制方法、装置及存储介质,通过采用站间单差观测方程作为数据质量控制模型,对模型残差个各观测方程可能出现的部分粗差或周跳进行显著性检验以实现车辆实时定位,且有效节省了车端算力。
2、为实现上述目的,本发明实施例提供了一种面向城市交通的定位数据质量控制方法,包括:
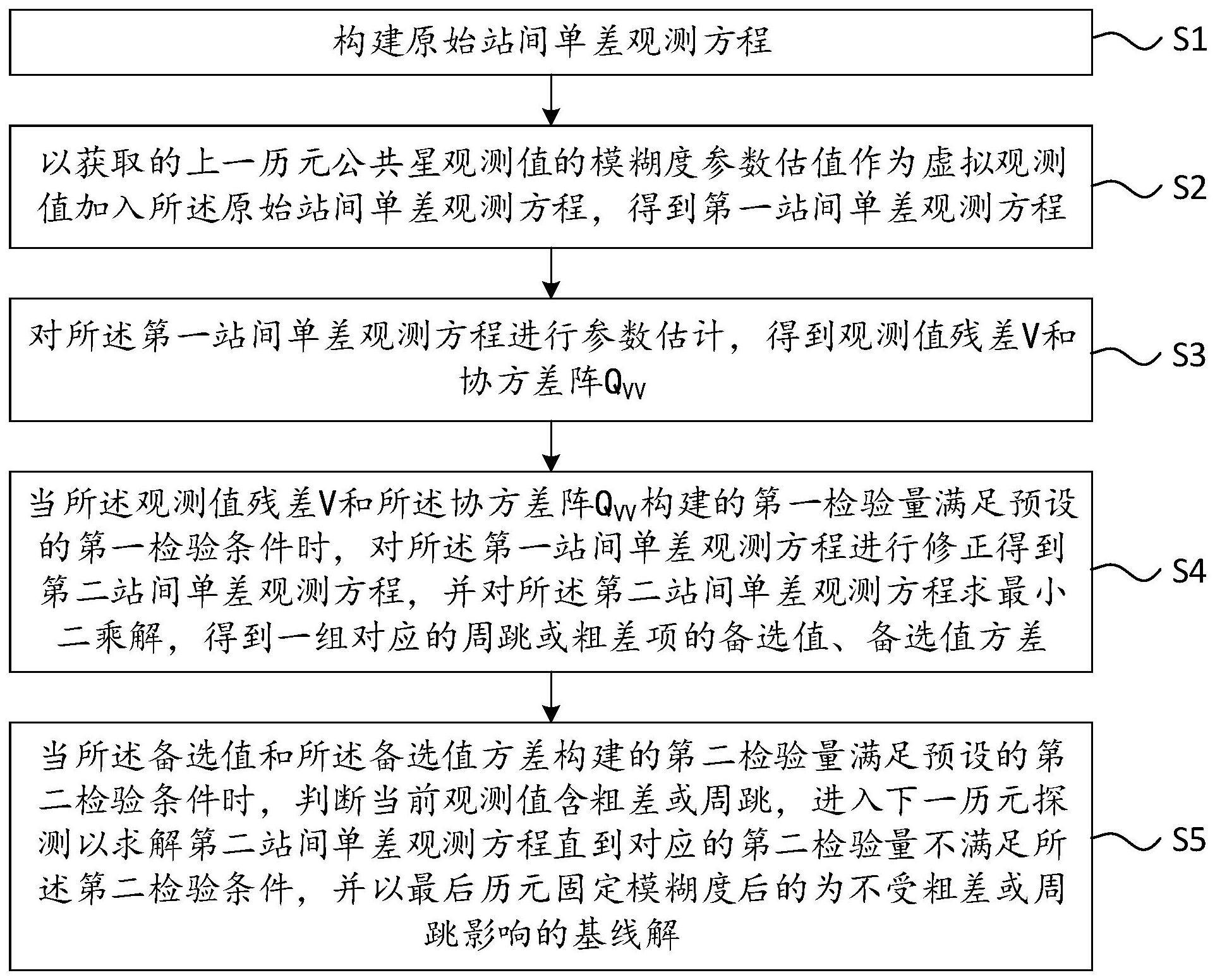
3、构建原始站间单差观测方程;
4、以获取的上一历元公共星观测值的模糊度参数估值作为虚拟观测值加入所述原始站间单差观测方程,得到第一站间单差观测方程;
5、对所述第一站间单差观测方程进行参数估计,得到观测值残差v和协方差阵qvv;
6、当所述观测值残差v和所述协方差阵qvv构建的第一检验量满足预设的第一检验条件时,对所述第一站间单差观测方程进行修正得到第二站间单差观测方程,并对所述第二站间单差观测方程求最小二乘解,得到一组对应的周跳或粗差项的备选值、备选值方差;
7、当所述备选值和所述备选值方差构建的第二检验量满足预设的第二检验条件时,判断当前观测值含粗差或周跳,进入下一历元探测以求解第二站间单差观测方程直到对应的第二检验量不满足所述第二检验条件,并以最后历元固定模糊度后的为不受粗差或周跳影响的基线解。
8、作为上述方案的改进,所述原始站间单差观测方程为:
9、
10、和为系数阵,其具体表示形式分别如下:
11、
12、
13、其中,δp表示单差伪距观测值,表示单差相位观测值,表示站星双差模糊度,x表示为非模糊度待估参数,e*为*维的单位向量;g(m-1)×3表示站星方位向量;mm-1表示对流层投影函数;表示f维的单位向量;λi表示第i个频率的波长,λ1表示第1个频率的波长;i*为*维的单位矩阵;待估参数可表示为:
14、
15、
16、其中,为r测站与b测站的基线向量,τrb为天顶对流层延迟站间单差,δl为电离层延迟站间单差,dtrb,j为吸收伪距偏差的有偏站间伪距钟差,dt′rb,j为吸收相位偏差及参考星站间单差模糊度的有偏站间相位钟差;表示第j个频r测站s星对应的模糊度参数,表示b测站s星模糊度参数,表示r测站基准星模糊度,表示b测站基准星模糊度;
17、
18、dtrb,j=dtr-dtb+dr,j-db,j;
19、
20、τrb=τr-τb;
21、
22、其中,表示f维的第j个要素为1其余要素为0的单位向量,xr、yr、zr表示测站r的三维空间坐标,xb、yb、zb表示测站b的三维空间坐标,dtr、dtb分别表示测站r和测站b的测站接收机钟差,dr,j、db,j分别表示测站r和测站b的测站伪距码偏差,δr,j表示测站r的测站相位偏差,τr、τb分别表示测站r和测站b的对流层延迟,表示m维的第s个要素为1其余要素为0的单位向量、分别表示测站r和测站b的电离层延迟。
23、作为上述方案的改进,在所述以获取的上一历元公共星观测值的模糊度参数估值作为虚拟观测值加入所述原始站间单差观测方程,得到第一站间单差观测方程之前,还包括:
24、对所述原始站间单差观测方程求最小二乘解,得到:
25、
26、其中,q表示原始站间单差观测值协方差阵,表示x的最优估值,表示站星双差模糊度估值。
27、作为上述方案的改进,所述第一站间单差观测方程为:
28、
29、其中,表示上一历元的站星双差模糊度估值,on表示n维0矩阵,in表示n维单位阵。
30、作为上述方案的改进,所述观测值残差v和协方差阵qvv通过以下方式得到:
31、对所述第一站间单差观测方程求最小二乘解,得到:
32、
33、
34、其中,表示当前历元的估值,表示当前历元的站星双差模糊度估值;q′表示第一站间单差观测方程协方差阵,表示双差模糊度方差协方差阵;
35、根据所述第一站间单差观测方程的最小二乘解计算得到观测值残差v和协方差阵qvv:
36、
37、
38、作为上述方案的改进,还包括:
39、服从f(r,∞)分布,r为多余观测数,构造第一检验条件:
40、
41、其中,v表示观测值残差,qvv表示协方差阵,fε(r,∞)为显著水平为ε下的临界值,如接受h1,则第一检验量满足所述第一检验条件,认为当前历元含有周跳或粗差。
42、作为上述方案的改进,所述第二站间单差观测方程为:
43、
44、其中,表示上一历元的站星双差模糊度估值,2mf表示观测值数,c表示公共星模糊度数,表示2mf维的第j个要素为1其余要素为0的单位向量,vj,t表示第t次探测中在第j个观测值对应的周跳或粗差项。
45、作为上述方案的改进,所述第二检验量为:
46、
47、其中,j=1,2,…,2mf+c;表示备选值,表示备选值方差;
48、γt服从正态分布,所述第二检验条件为:
49、
50、其中,nε/2(0,1)表示显著水平为ε的标准正态分布截止值,如接受h1,则第二检验量满足第二检验条件,认为当前观测值含粗差。
51、为实现上述目的,本发明实施例提供了一种面向城市交通的定位数据质量控制装置,包括:
52、原始方程构建模块,用于构建原始站间单差观测方程;
53、第一方程构建模块,用于以获取的上一历元公共星观测值的模糊度参数估值作为虚拟观测值加入所述原始站间单差观测方程,得到第一站间单差观测方程;其中,所述当前历元为非首历元;
54、参数估计模块,用于对所述第一站间单差观测方程进行参数估计,得到观测值残差v和协方差阵qvv;
55、备选值计算模块,用于当所述观测值残差v和所述协方差阵qvv构建的第一检验量满足预设的第一检验条件时,对所述第一站间单差观测方程进行修正得到第二站间单差观测方程,并对所述第二站间单差观测方程求最小二乘解,得到一组对应的周跳或粗差项的备选值、备选值方差;
56、求解模块,用于当所述备选值和所述备选值方差构建的第二检验量满足预设的第二检验条件时,判断当前观测值含粗差或周跳,进入下一历元探测以求解第二站间单差观测方程直到对应的第二检验量不满足所述第二检验条件,并以最后历元固定模糊度后的为不受粗差或周跳影响的基线解。
57、为实现上述目的,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如上述任一实施例所述的面向城市交通的定位数据质量控制方法。
58、与现有技术相比,本发明实施例公开的面向城市交通的定位数据质量控制方法、装置及计算机可读存储介质,首先,构建原始站间单差观测方程,然后以获取的上一历元公共星观测值的模糊度参数估值作为虚拟观测值加入所述原始站间单差观测方程,得到第一站间单差观测方程,通过对所述第一站间单差观测方程进行参数估计来得到观测值残差v和协方差阵qvv;当所述观测值残差v和所述协方差阵qvv构建的第一检验量满足预设的第一检验条件时,通过对所述第一站间单差观测方程进行修正得到第二站间单差观测方程,并对所述第二站间单差观测方程求最小二乘解,以得到一组对应的周跳或粗差项的备选值、备选值方差;当所述备选值和所述备选值方差构建的第二检验量满足预设的第二检验条件时,判断当前观测值含粗差或周跳并进入下一历元探测以求解第二站间单差观测方程直到对应的第二检验量不满足所述第二检验条件,并以最后历元固定模糊度后的为不受粗差或周跳影响的基线解。本发明实施例能够通过采用站间单差观测方程作为数据质量控制模型,对模型残差和各观测方程可能出现的部分粗差或周跳进行显著性检验以实现车辆实时定位,且有效节省了车端算力。
- 还没有人留言评论。精彩留言会获得点赞!