一种双层复合石英坩埚透明层厚度检测方法与流程
本发明属于石英坩埚厚度测量,具体涉及一种双层复合石英坩埚透明层厚度检测方法。
背景技术:
1、拉制单晶硅必须使用双层复合石英坩埚,双层复合石英坩埚作为一种消耗性器皿,对双层复合石英坩埚的外观要求十分严格,出厂前要对其尺寸、外观等参数进行严格地检查,否则会严重影响单晶硅生产质量。随着半导体工业对单晶硅的需求量与日俱增,双层复合石英坩埚的需求量也有显著增加。双层复合石英坩埚的双层结构为透明层与不透明层,透明层存在少量气泡,拉制单晶硅的生产过程中,双层石英坩埚的透明层会受到不同的化学物质侵蚀,因此需要定期检测双层石英坩埚透明层的厚度,来保证生产质量和设备寿命。目前,常用的透明层检测方法包括光谱分析、显微镜观察等手段,这些方法通常需要特殊的仪器设备和操作技能,成本较高,且操作复杂,容易出现误差,检测效率较低。因此,现在需要开发一种简单、快速、准确的双层复合石英坩埚透明层厚度检测方法,从而提高生产效率和品质。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种双层复合石英坩埚透明层厚度检测方法,通过设置两个呈垂直布设的电子显微镜,巧妙利用机械臂在到往侧壁检测点之间的路程,使呈竖直布设的电子显微镜在该路程间可以采集底部检测点的检测视频,从而节约视频采集时间,提高视频采集效率;再通过获取检测视频中透明层起始帧图像和透明层终止帧图像的帧数,结合机械臂的运动速度和电子显微镜的拍摄帧率计算坩埚透明层厚度,计算逻辑清晰,且便于对每个厚度检测点的透明层厚度数据进行后期视频溯源,从而便于提高生产质量。
2、为解决上述技术问题,本发明采用的技术方案是:一种双层复合石英坩埚透明层厚度检测方法,其特征在于,该方法包括以下步骤:
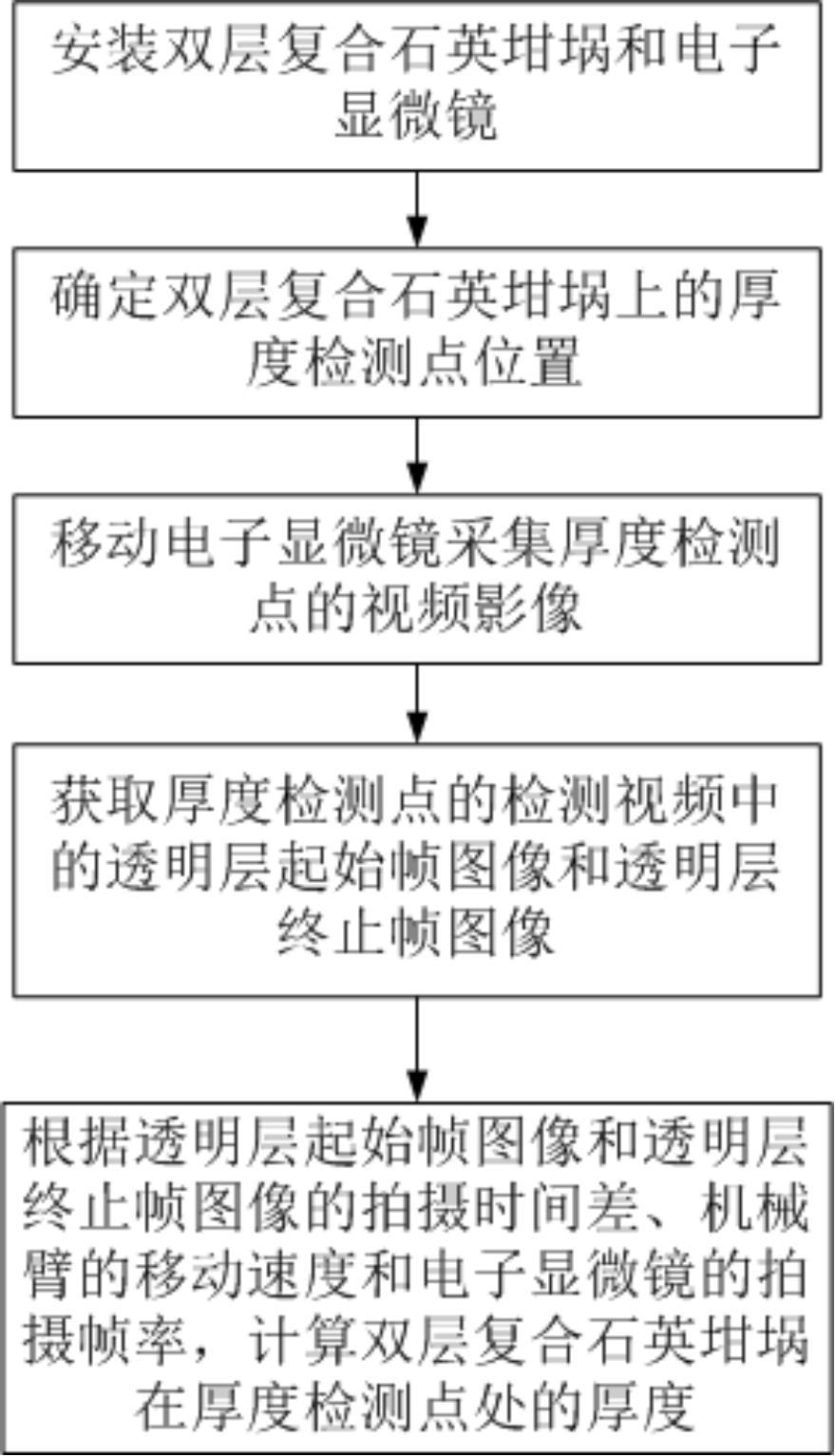
3、步骤一、安装双层复合石英坩埚和电子显微镜:
4、将双层复合石英坩埚安装在旋转平台上,在旋转平台旁侧的机械臂前端安装两个电子显微镜,两个电子显微镜呈垂直布设;
5、步骤二、确定双层复合石英坩埚上的厚度检测点位置,所述厚度检测点包括沿双层复合石英坩埚周向布设的多个检测点组,每个所述检测点组包括侧壁检测点和底部检测点,所述底部检测点位于双层复合石英坩埚的底部中心旁侧;
6、步骤三、移动电子显微镜采集厚度检测点的视频影像:
7、对任一个检测点组的视频影像采集方法均相同,具体步骤为:
8、步骤301、机械臂带动两个电子显微镜移动至双层复合石英坩埚上方,使呈竖直布设的电子显微镜正对一个底部检测点,随后带动两个电子显微镜垂直伸入至双层复合石英坩埚内,直至呈水平布设的电子显微镜中心与侧壁检测点位于同一高度;呈竖直布设的电子显微镜在垂直移动的过程中采集其正对的底部检测点的视频影像,并将其记做底部检测视频;
9、步骤302、机械臂带动两个电子显微镜原地旋转,使呈水平布设的电子显微镜的中心线穿过一个侧壁检测点且与双层复合石英坩埚侧壁垂直,随后机械臂带动两个电子显微镜朝向该侧壁检测点水平移动,直至呈水平布设的电子显微镜的拍摄面与双层复合石英坩埚的内侧壁相距一个设定间隔,停止移动;其中,移动过程中呈水平布设的电子显微镜采集该侧壁检测点的视频影像,并将其记做侧壁检测视频;电子显微镜的垂直移动和水平移动均为匀速移动;
10、一个检测点组的视频影像采集完毕后,机械臂复位至步骤301中双层复合石英坩埚的上方,旋转平台带动双层复合石英坩埚旋转,进行下一组检测点组的视频影像采集;底部检测视频和侧壁检测视频均记作厚度检测点的检测视频;
11、步骤四、获取厚度检测点的检测视频中的透明层起始帧图像和透明层终止帧图像:
12、将厚度检测点的检测视频中初始出现气泡的一帧图像记作该厚度检测点的透明层起始帧图像,将厚度检测点的检测视频中气泡由存在到消失的第一帧图像记做该厚度检测点的透明层终止帧图像;
13、步骤五、根据透明层起始帧图像和透明层终止帧图像的拍摄时间差、机械臂的移动速度和电子显微镜的拍摄帧率,计算双层复合石英坩埚在厚度检测点处的厚度。
14、上述的一种双层复合石英坩埚透明层厚度检测方法,其特征在于:所述侧壁检测点包括至少两层侧壁检测点,步骤302还包括,一层侧壁检测点的视频采集完毕后,机械臂带动电子显微镜水平后退至水平移动的起始位,随后带动电子显微镜垂直移动,使呈水平布设的电子显微镜的正对另一层侧壁检测点,再进行另一个侧壁检测点的视频采集。
15、上述的一种双层复合石英坩埚透明层厚度检测方法,其特征在于:步骤三中,在进行下一组检测点组的视频影像采集前,旋转平台带动双层复合石英坩埚旋转,共旋转n-1次,n为检测点组的数量,每次旋转的旋转方向相同,旋转n-1次后双层复合石英坩埚的总旋转角度不小于240°,n为不小于3的正整数。
16、上述的一种双层复合石英坩埚透明层厚度检测方法,其特征在于:步骤四中,获取透明层起始帧图像的具体步骤为:
17、对检测视频的各个帧图像依次进行灰度转换、滤波降噪和直方图均衡化图像增强处理,将各帧处理后的帧图像按照采集时间先后顺序进行边缘检测,将第一个检测出气泡的帧图像作为透明层起始帧图像。
18、上述的一种双层复合石英坩埚透明层厚度检测方法,其特征在于:步骤四中,获取透明层终止帧图像的具体步骤为:
19、利用vit模型对检测视频的各个帧图像进行分类,对任意一帧图像进行分类的具体步骤为:
20、1)将帧图像等分成n个图像块,2)将图像块从左到右,从上到下铺平并依次输入到全连接层,全连接层将n个图像块映射成d维向量;3)在d维向量起始位置设置一个类别记号;类别记号的维度为d维;4)为“类别记号+n个图像块特征”赋予一个位置编码;位置编码的维度为d维;5)将“类别记号+n个图像块特征”与其位置编码进行按位相加,作为transformer编码器的输入;6)取transformer编码器输出的第一个embedding,将其输入到多层感知器mlp中,得到该帧图像所属透明层终止帧图像类别的概率;其中,transformer编码器输出的第一个embedding即为类别记号对应的embedding;
21、将属于透明层终止帧图像类别的概率最大的一帧图像记做透明层终止帧图像。
22、上述的一种双层复合石英坩埚透明层厚度检测方法,其特征在于:步骤五的具体步骤为:
23、根据公式dt=td*vt和td=(pe-ps)/fps计算厚度检测点的厚度dt;其中,vt为机械臂在采集视频时的运动速度,td为检测视频中透明层起始帧图像至透明层终止帧图像的拍摄时间差,pe为透明层终止帧图像所在帧数,ps为透明层起始帧图像所在帧数,fps为电子显微镜的拍摄帧率。
24、本发明与现有技术相比的优点为:本发明通过设置两个呈垂直布设的电子显微镜,巧妙利用机械臂在到往侧壁检测点之间的路程,使呈竖直布设的电子显微镜在该路程间可以采集底部检测点的检测视频,从而节约视频采集时间,提高视频采集效率;再通过获取检测视频中透明层起始帧图像和透明层终止帧图像的帧数,结合机械臂的运动速度和电子显微镜的拍摄帧率计算坩埚透明层厚度,计算逻辑清晰,且便于对每个厚度检测点的透明层厚度数据进行后期视频溯源,从而便于提高生产质量。
25、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!