三维测量校正方法、三维测量方法及其装置、计算机装置与流程
本技术涉及三维测量领域,具体涉及一种三维测量校正方法、三维测量方法及其装置、计算机装置。
背景技术:
1、在工业三维测量领域,在对待测物进行三维测量成像时,待测物表面实际激光光斑和其它散斑噪声容易混杂,从而使得三维测量成像效果不佳。
技术实现思路
1、第一方面,本技术提供了一种三维测量校正方法,所述三维测量校正方法包括:
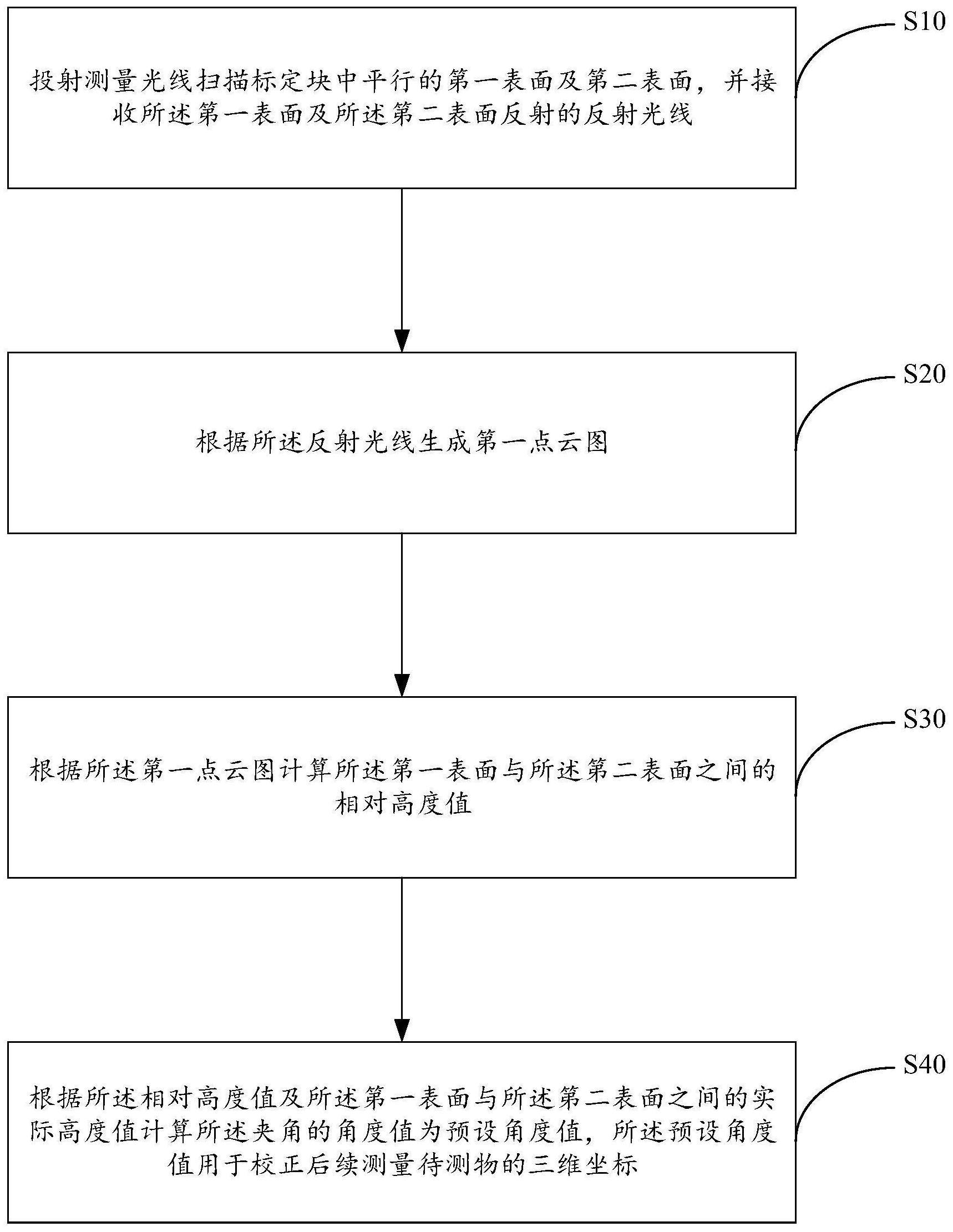
2、投射测量光线扫描标定块中平行的第一表面及第二表面,并接收所述第一表面及所述第二表面反射的反射光线,其中,测量光线的出光面与所述第一表面之间呈夹角设置;
3、根据所述反射光线生成第一点云图;
4、根据所述第一点云图计算所述第一表面与所述第二表面之间的相对高度值;及
5、根据所述相对高度值及所述第一表面与所述第二表面之间的实际高度值计算所述夹角的角度值为预设角度值,所述预设角度值用于校正后续测量待测物的三维坐标。
6、其中,所述根据所述相对高度值及所述第一表面与所述第二表面之间的实际高度值计算所述夹角的角度值为预设角度值,所述预设角度值用于校正后续测量待测物的三维坐标包括:
7、获取所述第一表面与所述第二表面之间的实际高度值;
8、根据dtheta=asin(hreal/hscan)计算所述预设角度值,其中,dtheta为所述预设角度值,hreal为所述实际高度值,hscan为所述相对高度值;及
9、根据x_new=x,y_new=y+z×cos(dtheta),z_new=z×sin(dtheta)计算校正后的三维坐标,其中,x、y、z为所述第一点云图中的坐标,且x方向平行于所述第一表面,x_new、y_new、z_new为校正后的坐标。
10、其中,所述根据所述第一点云图计算所述第一表面与所述第二表面之间的相对高度值包括:
11、根据所述第一点云图计算所述第一表面与所述第二表面中共面的多个第一子平面之间的相对高度,以得到多个子相对高度值;及
12、根据hscan_aver=sumhscan/n计算所述多个子相对高度值的平均值,其中,hscan_aver为所述多个子相对高度值的平均值,sumhscan为所述多个子相对高度值的和,n为所述第一子平面的个数,且n≥2;
13、所述根据所述相对高度值及所述第一表面与所述第二表面之间的实际高度值计算所述夹角的角度值为预设角度值,所述预设角度值用于校正后续测量待测物的三维坐标包括:
14、获取所述第一表面与所述多个第一子平面之间的多个子实际高度值;
15、根据hreal_aver=sumhreal/n计算所述多个子实际高度值的平均值,其中,hreal_aver为所述多个子相对高度值的平均值,sumhreal为所述多个子实际高度值的和;及
16、根据dtheta=asin(hreal_aver/hscan_aver)计算所述预设角度值,其中,dtheta为所述预设角度值;及
17、根据x_new=x,y_new=y+z×cos(dtheta),z_new=z×sin(dtheta)计算校正后的三维坐标,其中,x、y、z为所述第一点云图中的坐标,且x方向平行于所述第一表面,x_new、y_new、z_new为校正后的坐标。
18、其中,所述根据所述第一点云图计算所述第一表面与所述第二表面之间的相对高度值包括:
19、根据所述第一点云图计算所述第一表面与所述第二表面中平行的多个第二子平面之间的相对高度,以得到多个子相对高度值;
20、所述根据所述相对高度值及所述第一表面与所述第二表面之间的实际高度值计算所述夹角的角度值为预设角度值,所述预设角度值用于校正后续测量待测物的三维坐标包括:
21、获取所述第一表面与所述多个第二子平面之间的多个子实际高度值;
22、根据计算多个子预设角度值的平均值,其中,hreali为所述子实际高度值,hscani为所述子相对高度值,dtheta_aver为所述多个子预设角度值的平均值,n为所述第二子平面的个数,且n≥2;及
23、根据x_new=x,y_new=y+z×cos(dtheta_aver),z_new=z×sin(dtheta_aver)计算校正后的三维坐标,其中,x、y、z为所述第一点云图中的坐标,且x方向平行于所述第一表面,x_new、y_new、z_new为校正后的坐标。
24、其中,所述夹角大于0°且小于或等于20°。
25、其中,所述第一表面的平面度小于或等于5μm,且所述第二表面的平面度小于或等于5μm。
26、其中,所述投射测量光线扫描标定块中平行的第一表面及第二表面,并接收所述第一表面及所述第二表面反射的反射光线包括:
27、投射测量光线至标定块;
28、将所述测量光线在第一方向及第二方向移动以扫描所述第一表面及所述第二表面,其中,所述第一方向平行于所述第一表面,所述第二方向平行于所述第一表面且垂直于所述第一方向;及
29、接收所述第一表面及所述第二表面反射的反射光线。
30、本技术提供了一种三维测量校正方法,在预设坐标系xyz中,将出射测量光线的出光面自与所述第一表面平行的状态绕x轴旋转,以使所述出光面与所述第一表面之间呈夹角设置,从而区分所述测量光线在所述第一表面及所述第二表面形成的实际激光光斑和其它散斑噪声,即提高图像采集效果。通过所述第一表面与所述第二表面之间的相对高度值及实际高度值计算所述出光面与所述第一表面之间夹角,以得到所述预设角度值,所述预设角度值可用于后续测量待测物的三维坐标进行自动校正。因此,本技术提供的三维测量校正方法能够在提高图像采集效果的情况下,获取用于对测量待测物的三维坐标进行自动校正的预设角度值。
31、第二方面,本技术还提供了一种三维测量方法,所述三维测量方法还包括:
32、根据第一方面所述的三维测量校正方法得出所述预设角度值;
33、投射测量光线扫描待测物,其中,所述待测物位于所述标定块的原有位置;
34、将所述测量光线在第一方向及第二方向移动以扫描整个所述待测物,其中,所述第一方向平行于所述第一表面,所述第二方向平行于所述第一表面且垂直于所述第一方向;
35、接收所述待测物反射的反射光线;及
36、根据所述待测物反射的反射光线及所述预设角度值生成所述待测物的第二点云图。
37、本技术提供的三维测量方法能够通过第一方面所述的三维测量校正方法对所述待测物的测量进行自动校正,从而提高所述待测物的成像效果。
38、第三方面,本技术还提供了一种三维测量装置,所述三维测量装置包括:
39、标定块,所述标定块具有平行设置的第一表面及第二表面;
40、固定支架,所述固定支架用于固定所述标定块;
41、三维轮廓测量仪,所述三维轮廓测量仪包括相机,所述相机用于产生测量光线,所述测量光线经由所述相机的出光面出射,所述测量光线用于扫描所述第一表面及所述第二表面,所述相机还用于接收所述第一表面及所述第二表面反射的反射光线,其中,所述测量光线的出光面与所述第一表面之间呈夹角设置;
42、所述三维轮廓测量仪还包括处理器,所述处理器用于:根据所述反射光线生成第一点云图;根据所述第一点云图计算所述第一表面与所述第二表面之间的相对高度值;根据所述相对高度值及所述第一表面与所述第二表面之间的实际高度值计算所述夹角的角度值为预设角度值,所述预设角度值用于校正后续测量待测物的三维坐标。
43、本技术提供的所述三维测量装置可采用第一方面所述的三维测量校正方法计算出所述预设角度值,且在完成校正后,采用第二方面所述的三维测量方法对待测物进行扫描成像,以提高所述待测物的成像效果。
44、第四方面,本技术还提供了一种计算机装置,所述计算机装置包括:
45、计算机可读存储介质,所述计算机可读存储介质存储有计算机可读程序;及
46、处理器,所述处理器用于读取及调用所述程序,以执行如第一方面所述的三维测量校正方法;或者所述处理器用于读取及调用所述程序,以执行第二方面所述的三维测量方法。
47、本技术提供的计算机装置通过所述处理器读取及调用所述程序,以执行第一方面所述三维测量校正方法后,读取及调用所述程序,以执行第二方面所述三维测量方法,可在对待测物进行扫描成像时,提高所述待测物的成像效果。
- 还没有人留言评论。精彩留言会获得点赞!