模型训练方法和装置、轨迹预测方法和装置与流程
本发明涉及自动驾驶,尤其涉及一种模型训练方法和装置、轨迹预测方法和装置。
背景技术:
1、为了保证自动驾驶过程中车辆的安全性,需要对交通参与者的轨迹进行预测,以避免车辆与障碍物发生碰撞。
2、现有的方法在预测过程中,通常仅对单个交通参与者的未来轨迹进行拟合。
3、该方法忽略了不同交通参与者轨迹之间的相互影响,导致预测得到的轨迹准确度较低,进而影响车辆行驶的安全性。
技术实现思路
1、有鉴于此,本发明实施例提供一种模型训练方法和装置、轨迹预测方法和装置,能够提高轨迹预测的准确度。
2、第一方面,本发明实施例提供了一种模型训练方法,包括:
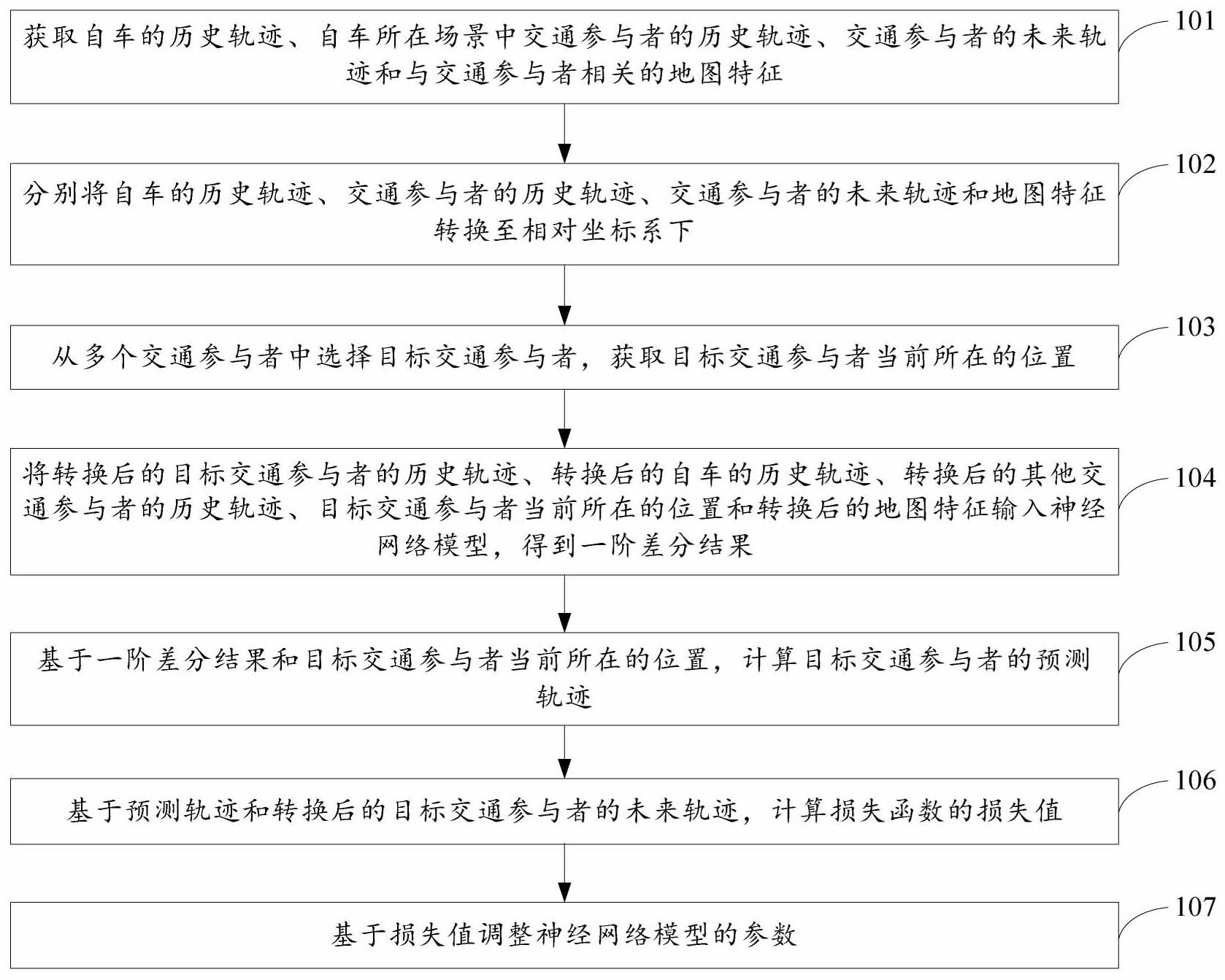
3、获取自车的历史轨迹、所述自车所在场景中交通参与者的历史轨迹、所述交通参与者的未来轨迹和与所述交通参与者相关的地图特征;
4、分别将所述自车的历史轨迹、所述交通参与者的历史轨迹、所述交通参与者的未来轨迹和所述地图特征转换至相对坐标系下;其中,所述相对坐标系的原点位于所述自车的历史轨迹上;
5、从多个所述交通参与者中选择目标交通参与者,获取所述目标交通参与者当前所在的位置;
6、将转换后的目标交通参与者的历史轨迹、转换后的自车的历史轨迹、转换后的其他交通参与者的历史轨迹、所述目标交通参与者当前所在的位置和转换后的地图特征输入神经网络模型,得到一阶差分结果;其中,所述神经网络模型通过自注意力机制获得目标交通参与者与场景的交互特征,并基于目标交通参与者与场景的交互特征得到所述一阶差分结果;
7、基于所述一阶差分结果和所述目标交通参与者当前所在的位置,计算所述目标交通参与者的预测轨迹;
8、基于所述预测轨迹和转换后的所述目标交通参与者的未来轨迹,计算损失函数的损失值;
9、基于所述损失值调整所述神经网络模型的参数。
10、第二方面,本发明实施例提供了一种轨迹预测方法,包括:
11、获取自车的历史轨迹、所述自车所在场景中交通参与者的历史轨迹、所述交通参与者的未来轨迹和与所述交通参与者相关的地图特征;
12、分别将所述自车的历史轨迹、所述交通参与者的历史轨迹、所述交通参与者的未来轨迹和所述地图特征转换至相对坐标系下;其中,所述相对坐标系的原点位于所述自车的历史轨迹上;
13、从多个所述交通参与者中选择目标交通参与者,获取所述目标交通参与者当前所在的位置;
14、将转换后的目标交通参与者的历史轨迹、转换后的自车的历史轨迹、转换后的其他交通参与者的历史轨迹、所述目标交通参与者当前所在的位置和转换后的地图特征输入神经网络模型,得到一阶差分结果;其中,所述神经网络模型通过自注意力机制获得目标交通参与者与场景的交互特征,并基于目标交通参与者与场景的交互特征得到所述一阶差分结果;
15、基于所述一阶差分结果和所述目标交通参与者当前所在的位置,计算所述目标交通参与者的预测轨迹;
16、基于所述预测轨迹和转换后的所述目标交通参与者的未来轨迹,计算损失函数的损失值;
17、基于所述损失值调整所述神经网络模型的参数;
18、基于训练好的神经网络模型,预测当前交通参与者的轨迹。
19、第三方面,本发明实施例提供了一种模型训练装置,包括:
20、坐标转换模块,配置为获取自车的历史轨迹、所述自车所在场景中交通参与者的历史轨迹、所述交通参与者的未来轨迹和与所述交通参与者相关的地图特征;分别将所述自车的历史轨迹、所述交通参与者的历史轨迹、所述交通参与者的未来轨迹和所述地图特征转换至相对坐标系下;其中,所述相对坐标系的原点位于所述自车的历史轨迹上;
21、训练模块,配置为从多个所述交通参与者中选择目标交通参与者,获取所述目标交通参与者当前所在的位置;将转换后的目标交通参与者的历史轨迹、转换后的自车的历史轨迹、转换后的其他交通参与者的历史轨迹、所述目标交通参与者当前所在的位置和转换后的地图特征输入神经网络模型,得到一阶差分结果;其中,所述神经网络模型通过自注意力机制获得目标交通参与者与场景的交互特征,并基于目标交通参与者与场景的交互特征得到所述一阶差分结果;
22、调整模块,配置为基于所述一阶差分结果和所述目标交通参与者当前所在的位置,计算所述目标交通参与者的预测轨迹;基于所述预测轨迹和转换后的所述目标交通参与者的未来轨迹,计算损失函数的损失值;基于所述损失值调整所述神经网络模型的参数。
23、第四方面,本发明实施例提供了一种轨迹预测装置,包括:
24、坐标转换模块,配置为获取自车的历史轨迹、所述自车所在场景中交通参与者的历史轨迹、所述交通参与者的未来轨迹和与所述交通参与者相关的地图特征;分别将所述自车的历史轨迹、所述交通参与者的历史轨迹、所述交通参与者的未来轨迹和所述地图特征转换至相对坐标系下;其中,所述相对坐标系的原点位于所述自车的历史轨迹上;从多个所述交通参与者中选择目标交通参与者,获取所述目标交通参与者当前所在的位置;
25、训练模块,配置为将转换后的目标交通参与者的历史轨迹、转换后的自车的历史轨迹、转换后的其他交通参与者的历史轨迹、所述目标交通参与者当前所在的位置和转换后的地图特征输入神经网络模型,得到一阶差分结果;其中,所述神经网络模型通过自注意力机制获得目标交通参与者与场景的交互特征,并基于目标交通参与者与场景的交互特征得到所述一阶差分结果;
26、调整模块,配置为基于所述一阶差分结果和所述目标交通参与者当前所在的位置,计算所述目标交通参与者的预测轨迹;基于所述预测轨迹和转换后的所述目标交通参与者的未来轨迹,计算损失函数的损失值;基于所述损失值调整所述神经网络模型的参数;
27、预测模块,配置为基于训练好的神经网络模型,预测当前交通参与者的轨迹。
28、第五方面,本发明实施例提供了一种电子设备,包括:
29、一个或多个处理器;
30、存储装置,用于存储一个或多个程序,
31、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上述任一实施例所述的方法。
32、第六方面,一种计算机可读介质,其上存储有计算机程序,所述程序被处理器执行时实现如上述任一实施例所述的方法。
33、上述发明中的一个实施例具有如下优点或有益效果:神经网络模型基于自注意力机制,学习目标交通参与者与场景中其他交通参与者相互关系,得到目标交通参与者与场景的交互特征。该神经网络模型在轨迹预测过程中,不仅考虑了目标交通参与者自身的轨迹变化趋势,还考虑了目标交通参与者与场景中其他交通参与者的相互作用,能够提高轨迹预测的准确度。另外,将自车的历史轨迹等物理世界中的点转换至相对坐标系下,使该方法能够在不同的场景下迁移使用,如在不同的路段使用,提高轨迹预测效率。
34、上述的非惯用的可选方式所具有的进一步效果将在下文中结合具体实施方式加以说明。
- 还没有人留言评论。精彩留言会获得点赞!