检测VR镜片脏污的方法、装置、设备、介质和程序产品与流程
本技术涉及光学检测,特别是涉及一种检测vr镜片脏污的方法、装置、检测设备、存储介质和计算机程序产品。
背景技术:
1、随着科技技术的快速发展,带有多层镜片的镜片模组(例如vr镜片)在vr眼镜中广泛使用,而带有多层镜片的镜片模组在生产过程中,不可避免地会产生脏污、灰尘、污染物等,且这些脏污可能会存在于镜片之间的某个面上,
2、传统技术中,镜片的脏污检测的方式,是利用相机移动以进行拍摄不同的影像,针对所拍摄的影像上,通过局部对比度的差异作为检测脏污的标准。
3、然而,由于相机拍摄过程中存在很多噪声,特别是随着脏污空间分辨率的增加,可能导致对比度较微弱的脏污无法检测出来。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够更加完整地检测出镜片的脏污信息的检测vr镜片脏污的方法、装置、检测设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种检测vr镜片脏污的方法。应用于检测设备,所述检测设备包括人眼相机、待检测镜片模组和光源;所述人眼相机包括人眼镜头,所述待检测镜片模组包括第一镜片,所述方法包括:
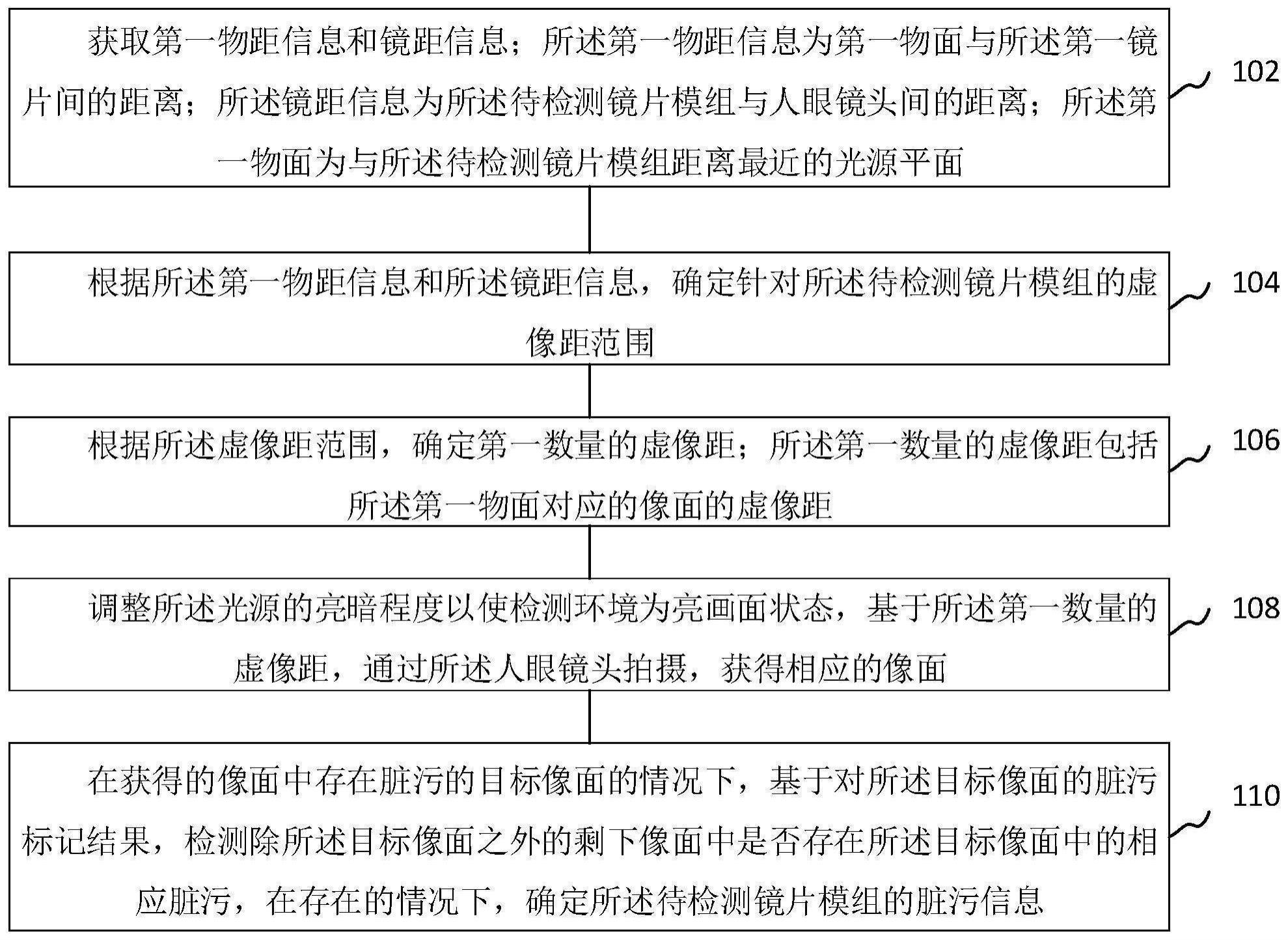
3、获取第一物距信息和镜距信息;所述第一物距信息为第一物面与所述第一镜片间的距离;所述镜距信息为所述待检测镜片模组与人眼镜头间的距离;所述第一物面为与所述待检测镜片模组距离最近的光源平面;
4、根据所述第一物距信息和所述镜距信息,确定针对所述待检测镜片模组的虚像距范围;
5、根据所述虚像距范围,确定第一数量的虚像距;所述第一数量的虚像距包括所述第一物面对应的像面的虚像距;
6、调整所述光源的亮暗程度以使检测环境为亮画面状态,基于所述第一数量的虚像距,通过所述人眼镜头拍摄,获得相应的像面;
7、在获得的像面中存在脏污的目标像面的情况下,基于对所述目标像面的脏污标记结果,检测除所述目标像面之外的剩下像面中是否存在所述目标像面中的相应脏污,在存在的情况下,确定所述待检测镜片模组的脏污信息。
8、在其中一个实施例中,所述根据所述第一物距信息和所述镜距信息,确定针对所述待检测镜片模组的虚像距范围,包括:
9、根据所述第一物距信息和所述镜距信息,确定光源、待检测镜片模组以及人眼相机的相对位置;
10、根据所述光源、所述待检测镜片模组以及所述人眼相机的相对位置,确定针对所述待检测镜片模组的虚像距范围。
11、在其中一个实施例中,所述虚像距范围包括最短虚像距和最长虚像距;所述根据所述虚像距范围,确定第一数量的虚像距,包括:
12、确定所述最短虚像距的像面对应的第二物面,所述第二物面处于所述待检测镜片模组中;其中,所述最短虚像距为所述第二物面对应的第一像面的虚像距;所述最长虚像距为第一物面对应的像面的虚像距;第二物距信息为所述第一透镜的顶点至所述第二物面的距离;
13、根据所述第二物距信息,确定第一数量的虚像距。
14、在其中一个实施例中,所述根据所述第二物距信息,确定第一数量的虚像距,包括:
15、根据所述第二物距信息,确定对应的分辨率信息;
16、根据所述分辨率信息和所述虚像距范围,确定所述第一数量的虚像距。
17、在其中一个实施例中,所述脏污标记结果的获取过程,包括:
18、获取第一测试图像和第二测试图像;所述第一测试图像为棋盘格图像,所述第二测试图像为测试白画面图像;
19、根据所述第一测试图像,记录并标记所述目标像面中脏污的第一位置信息;
20、根据所述第二测试图像,记录并标记所述目标像面中脏污的对比度信息;
21、将所述第一位置信息和所述对比度信息作为脏污标记结果。
22、在其中一个实施例中,所述确定所述待检测镜片模组的脏污信息,包括:
23、获取目标脏污,所述目标脏污为所述目标像面与剩余像面中存在的相应脏污;
24、根据所述第一数量的虚像距和所述第二物距信息,确定针对目标脏污的第二位置信息;
25、根据所述第一位置信息、所述第二位置信息和所述对比度信息,确定所述待检测镜片模组中脏污的位置信息和对比度信息。
26、第二方面,本技术还提供了一种检测vr镜片脏污的装置。应用于检测设备,所述检测设备包括人眼相机、待检测镜片模组和光源;所述人眼相机包括人眼镜头,所述待检测镜片模组包括第一镜片,所述装置包括:
27、第一信息获取模块,用于获取第一物距信息和镜距信息;所述第一物距信息为第一物面与所述第一镜片间的距离;所述镜距信息为所述待检测镜片模组与人眼镜头间的距离;所述第一物面为与所述待检测镜片模组距离最近的光源平面;
28、虚像距范围确定模块,用于根据所述第一物距信息和所述镜距信息,确定针对所述待检测镜片模组的虚像距范围;
29、虚像距数量确定模块,用于根据所述虚像距范围,确定第一数量的虚像距;所述第一数量的虚像距包括所述第一物面对应的像面的虚像距;
30、像面获取模块,用于调整所述光源的亮暗程度以使检测环境为亮画面状态,基于所述第一数量的虚像距,通过所述人眼镜头拍摄,获得相应的像面;
31、模组脏污确定模块,用于在获得的像面中存在脏污的目标像面的情况下,基于对所述目标像面的脏污标记结果,检测除所述目标像面之外的剩下像面中是否存在所述目标像面中的相应脏污,在存在的情况下,确定所述待检测镜片模组的脏污信息。
32、第三方面,本技术还提供了一种检测设备。所述检测设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
33、获取第一物距信息和镜距信息;所述第一物距信息为第一物面与所述第一镜片间的距离;所述镜距信息为所述待检测镜片模组与人眼镜头间的距离;所述第一物面为与所述待检测镜片模组距离最近的光源平面;
34、根据所述第一物距信息和所述镜距信息,确定针对所述待检测镜片模组的虚像距范围;
35、根据所述虚像距范围,确定第一数量的虚像距;所述第一数量的虚像距包括所述第一物面对应的像面的虚像距;
36、调整所述光源的亮暗程度以使检测环境为亮画面状态,基于所述第一数量的虚像距,通过所述人眼镜头拍摄,获得相应的像面;
37、在获得的像面中存在脏污的目标像面的情况下,基于对所述目标像面的脏污标记结果,检测除所述目标像面之外的剩下像面中是否存在所述目标像面中的相应脏污,在存在的情况下,确定所述待检测镜片模组的脏污信息。
38、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
39、获取第一物距信息和镜距信息;所述第一物距信息为第一物面与所述第一镜片间的距离;所述镜距信息为所述待检测镜片模组与人眼镜头间的距离;所述第一物面为与所述待检测镜片模组距离最近的光源平面;
40、根据所述第一物距信息和所述镜距信息,确定针对所述待检测镜片模组的虚像距范围;
41、根据所述虚像距范围,确定第一数量的虚像距;所述第一数量的虚像距包括所述第一物面对应的像面的虚像距;
42、调整所述光源的亮暗程度以使检测环境为亮画面状态,基于所述第一数量的虚像距,通过所述人眼镜头拍摄,获得相应的像面;
43、在获得的像面中存在脏污的目标像面的情况下,基于对所述目标像面的脏污标记结果,检测除所述目标像面之外的剩下像面中是否存在所述目标像面中的相应脏污,在存在的情况下,确定所述待检测镜片模组的脏污信息。
44、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
45、获取第一物距信息和镜距信息;所述第一物距信息为第一物面与所述第一镜片间的距离;所述镜距信息为所述待检测镜片模组与人眼镜头间的距离;所述第一物面为与所述待检测镜片模组距离最近的光源平面;
46、根据所述第一物距信息和所述镜距信息,确定针对所述待检测镜片模组的虚像距范围;
47、根据所述虚像距范围,确定第一数量的虚像距;所述第一数量的虚像距包括所述第一物面对应的像面的虚像距;
48、调整所述光源的亮暗程度以使检测环境为亮画面状态,基于所述第一数量的虚像距,通过所述人眼镜头拍摄,获得相应的像面;
49、在获得的像面中存在脏污的目标像面的情况下,基于对所述目标像面的脏污标记结果,检测除所述目标像面之外的剩下像面中是否存在所述目标像面中的相应脏污,在存在的情况下,确定所述待检测镜片模组的脏污信息。
50、上述检测vr镜片脏污的方法、装置、检测设备、存储介质和计算机程序产品,获取第一物距信息和镜距信息;根据第一物距信息和镜距信息,确定针对待检测镜片模组的虚像距范围;根据虚像距范围,确定第一数量的虚像距;调整光源的亮暗程度以使检测环境为亮画面状态,基于第一数量的虚像距,通过人眼镜头拍摄,获得相应的像面;在获得的像面中存在脏污的目标像面的情况下,基于对目标像面的脏污标记结果,检测除目标像面之外的剩下像面中是否存在目标像面中的相应脏污,在存在的情况下,确定待检测镜片模组的脏污信息。相对于传统技术中使用相机移动进行拍摄得到不同的影像进行检测脏污的方式,本方法中通过人眼镜头进行拍摄,人眼镜头是一个高精度变焦镜头,保证了影像具有较高的信噪比以及分辨率,影像的清晰度大大提升,从而通过较高的信噪比和更加清晰的影像,检测出待检测镜片模组中对比度较微弱的脏污,从而实现能够更加完整地检测出镜片的脏污信息。并且,通过人眼镜头,实现了模拟人眼,减少待检测镜片模组中镜片的曲面影响而导致地形变,从而减少检测镜片脏污的误差。
- 还没有人留言评论。精彩留言会获得点赞!