机器人移动方法和机器人移动装置与流程
本技术属于机器人,尤其涉及一种机器人移动方法和机器人移动装置。
背景技术:
1、随着室内定位技术的广泛应用,各种技术的复合应用场景越来越多。相关技术中存在基于传感器或地磁信号对目标对象进行定位并基于定位信息对目标对象进行导航的方法,但该导航方法的精度较低,且采集工作较多导致导航结果容易出错。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种机器人移动方法和机器人移动装置,解决了蓝牙在复杂环境下定位误差较大且易受障碍物干扰的问题,同时解决了在有墙体信号屏蔽的多区间uwb信号无法覆盖问题,无需高成本固定布置uwb基站;除此之外,本技术最终的定位精度达到了厘米级别,定位精准度和准确度较高。
2、第一方面,本技术提供了一种机器人移动方法,该方法包括:
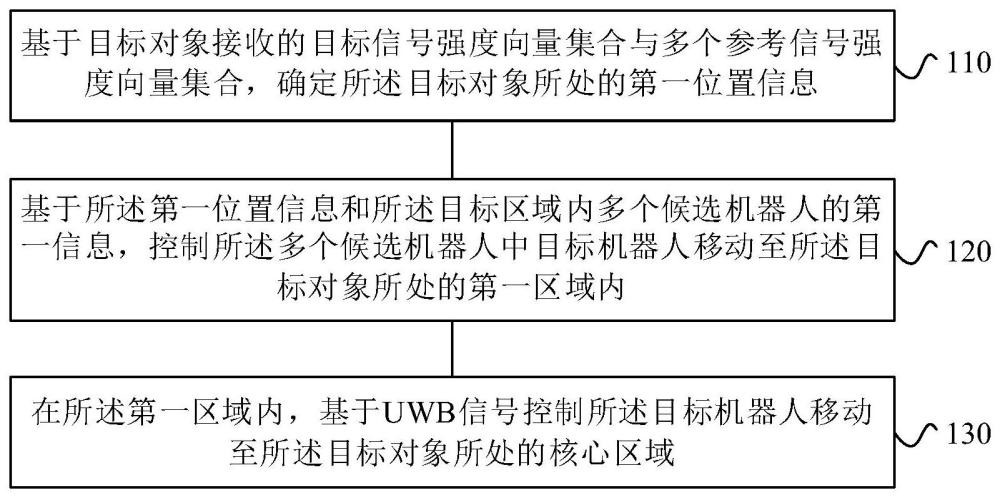
3、基于目标对象接收的目标信号强度向量集合与多个参考信号强度向量集合,确定所述目标对象所处的第一位置信息;所述目标信号强度向量集合为基于所述目标对象接收的多个子区域中蓝牙信标装置对应的信号强度向量确定的,所述多个子区域与所述多个参考信号强度向量集合一一对应,所述参考信号强度向量集合为基于与所述参考信号强度向量集合对应的子区域中参考点所接收的各所述子区域中所述蓝牙信标装置对应的信号强度向量确定的,所述多个子区域为对所述目标对象所在的目标区域进行划分得到的;
4、基于所述第一位置信息和所述目标区域内多个候选机器人的第一信息,控制所述多个候选机器人中目标机器人移动至所述目标对象所处的第一区域内;
5、在所述第一区域内,基于uwb信号控制所述目标机器人移动至所述目标对象所处的核心区域。
6、根据本技术实施例提供的机器人移动方法,通过将目标对象所处的目标区域划分为多个子区域,并基于目标对象接收到的各子区域中蓝牙信标装置发送的蓝牙信号,控制机器人移动至目标对象所处的第一区域,然后从蓝牙定位切换至uwb定位,在第一区域内,基于uwb信号控制机器人移动至目标对象所处的核心区域,在基于蓝牙粗定位的基础上,通过uwb信号进行精确定位,解决了蓝牙在复杂环境下定位误差较大且易受障碍物干扰的问题,同时解决了在有墙体信号屏蔽的多区间uwb信号无法覆盖问题,无需高成本固定布置uwb基站;除此之外,本技术最终的定位精度达到了厘米级别,定位精准度和准确度较高。
7、本技术一个实施例的机器人移动方法,所述基于目标对象接收的目标信号强度向量集合与多个参考信号强度向量集合,确定所述目标对象所处的第一位置信息,包括:
8、基于所述目标信号强度向量集合和所述多个参考信号强度向量集合,分别确定所述目标对象与各所述蓝牙信标装置之间的第一欧式距离;
9、基于多个所述第一欧式距离和所述参考点的第二位置信息,确定所述第一位置信息。
10、本技术一个实施例的机器人移动方法,所述基于多个所述第一欧式距离和所述参考点的第二位置信息,确定所述第一位置信息,包括:
11、基于公式:
12、
13、确定所述第一位置信息,其中,i∈[1,nr],nr为所述多个参考信号强度向量集合的数量,为所述第一位置信息,li为所述目标对象与第i个子区域中蓝牙信标装置之间的第一欧式距离,(xi,yi)为所述第i个子区域中参考点的第二位置信息,σ为参数,k为所述多个子区域的数量。
14、本技术一个实施例的机器人移动方法,所述第一信息包括:所述候选机器人的第三位置信息和所述候选机器人的工作状态信息,所述基于所述第一位置信息和所述目标区域内多个候选机器人的第一信息,控制所述多个候选机器人中目标机器人移动至所述目标对象所处的第一区域内,包括:
15、基于所述第一位置信息、所述第三位置信息和所述工作状态信息,从所述多个候选机器人中确定所述目标机器人;所述目标机器人为距离所述目标对象最近且处于最佳待机状态的候选机器人;
16、基于所述第一位置信息和所述第三位置信息,规划第一路径;
17、基于所述第一路径,控制所述目标机器人移动至所述第一区域内。
18、本技术一个实施例的机器人移动方法,所述基于所述第一路径,控制所述目标机器人移动至所述第一区域内,包括:
19、设置于所述目标对象的uwb定位标签基于目标周期发送所述uwb信号;
20、在所述目标机器人接收到所述uwb信号的情况下,确定所述目标机器人进入所述第一区域内。
21、本技术一个实施例的机器人移动方法,所述在所述第一区域内,基于uwb信号控制所述目标机器人移动至所述目标对象所处的核心区域,包括:
22、基于所述uwb信号,确定所述目标对象相对于所述目标机器人的相对空间位姿;
23、基于所述目标区域对应的栅格地图和所述相对空间位姿,获取所述目标机器人与所述目标对象之间的第二路径;
24、基于所述第二路径,控制所述目标机器人移动至所述核心区域。
25、本技术一个实施例的机器人移动方法,所述基于所述uwb信号,确定所述目标对象相对于所述目标机器人的相对空间位姿,包括:
26、基于所述uwb信号,确定所述目标对象相对于所述目标机器人的二维相对坐标;
27、基于所述二维相对坐标、所述目标机器人的所述第一信息以及所述uwb信号对应的波达方向,获取所述相对空间位姿。
28、本技术一个实施例的机器人移动方法,所述基于所述uwb信号,确定所述目标对象相对于所述目标机器人的二维相对坐标,包括:
29、设置于所述目标机器人上的至少两根天线分别接收所述目标对象发送的同一所述uwb信号;
30、基于至少两根天线接收所述uwb信号的信号到达时间差,确定目标角度;
31、基于至少两根天线分别接收到所述uwb信号的接收时间和所述目标角度,确定所述二维相对坐标。
32、本技术一个实施例的机器人移动方法,所述基于所述目标区域对应的栅格地图和所述相对空间位姿,获取所述目标机器人与所述目标对象之间的第二路径,包括:
33、基于所述栅格地图和所述相对空间位姿,获取所述目标机器人与所述目标对象之间的第二路径;
34、基于所述第二路径控制所述目标机器人移动并更新所述目标对象相对于所述目标机器人的相对空间位姿;
35、基于更新后的相对空间位姿修正所述第二路径。
36、第二方面,本技术提供了一种机器人移动装置,该装置包括:
37、第一处理模块,用于基于目标对象接收的目标信号强度向量集合与多个参考信号强度向量集合,确定所述目标对象所处的第一位置信息;所述目标信号强度向量集合为基于所述目标对象接收的多个子区域中蓝牙信标装置对应的信号强度向量确定的,所述多个子区域与所述多个参考信号强度向量集合一一对应,所述参考信号强度向量集合为基于与所述参考信号强度向量集合对应的子区域中参考点所接收的各所述子区域中所述蓝牙信标装置对应的信号强度向量确定的,所述多个子区域为对所述目标对象所在的目标区域进行划分得到的;
38、第二处理模块,用于基于所述第一位置信息和所述目标区域内多个候选机器人的第一信息,控制所述多个候选机器人中目标机器人移动至所述目标对象所处的第一区域内;
39、第三处理模块,用于在所述第一区域内,基于uwb信号控制所述目标机器人移动至所述目标对象所处的核心区域。
40、根据本技术实施例提供的机器人移动装置,通过将目标对象所处的目标区域划分为多个子区域,并基于目标对象接收到的各子区域中蓝牙信标装置发送的蓝牙信号,控制机器人移动至目标对象所处的第一区域,然后从蓝牙定位切换至uwb定位,在第一区域内,基于uwb信号控制机器人移动至目标对象所处的核心区域,在基于蓝牙粗定位的基础上,通过uwb信号进行精确定位,解决了蓝牙在复杂环境下定位误差较大且易受障碍物干扰的问题,同时解决了在有墙体信号屏蔽的多区间uwb信号无法覆盖问题,无需高成本固定布置uwb基站;除此之外,本技术最终的定位精度达到了厘米级别,定位精准度和准确度较高。
41、第三方面,本技术提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的机器人移动方法。
42、第四方面,本技术提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的机器人移动方法。
43、第五方面,本技术提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的机器人移动方法。
44、本技术实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
45、通过将目标对象所处的目标区域划分为多个子区域,并基于目标对象接收到的各子区域中蓝牙信标装置发送的蓝牙信号,控制机器人移动至目标对象所处的第一区域,然后从蓝牙定位切换至uwb定位,在第一区域内,基于uwb信号控制机器人移动至目标对象所处的核心区域,在基于蓝牙粗定位的基础上,通过uwb信号进行精确定位,解决了蓝牙在复杂环境下定位误差较大且易受障碍物干扰的问题,同时解决了在有墙体信号屏蔽的多区间uwb信号无法覆盖问题,无需高成本固定布置uwb基站;除此之外,本技术最终的定位精度达到了厘米级别,定位精准度和准确度较高。
46、进一步地,基于各候选机器人和目标对象之间的欧式距离以及各候选机器人的工作状态信息,从多个候选机器人中选择距离目标对象最近且处于最佳待机状态的候选机器人作为目标机器人,然后基于导航算法获取第一路径,并基于第一路径自主导航至第一区域,能够选取最优的机器人,避免了召唤的机器人工作状态不佳的问题,且通过蓝牙进行粗定位,解决了有墙体信号屏蔽的多区间uwb信号无法覆盖的问题,实现了在场景中任一位置进行机器人自主召唤。
47、更进一步地,通过设置目标对象的uwb定位标签不断发送uwb信号,能够在目标机器人接收到uwb信号的情况下从蓝牙定位切换至uwb定位,在基于蓝牙粗定位的基础上,通过uwb信号进行精确定位,解决了在有墙体信号屏蔽的多区间uwb信号无法覆盖问题,无需高成本固定布置uwb基站。
48、再进一步地,通过栅格地图和相对空间位姿,获取目标机器人与目标对象之间的第二路径,然后基于第二路径控制目标机器人移动并更新目标对象相对于目标机器人的相对空间位姿,再基于更新后的相对空间位姿修正第二路径,可以选择最优路径进行导航,提高了导航过程中的速度、稳定性以及准确性。
49、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!