定位算法的精度检测装置的制作方法
本技术涉及无人驾驶,特别是涉及一种定位算法的精度检测装置。
背景技术:
1、随着无人驾驶开发领域的发展,定位模块用于获得无人驾驶车辆自身在地图中的位置信息,其中,定位算法可结合其他辅助算法实现定位模块的主要功能。
2、然而,目前的定位算法由于无法获取到无人驾驶车辆的位置参考值,评估定位算法精度时,得到的误差综合了构建地图的误差和定位算法的误差,因此无法对本车的定位算法进行精度检测。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种定位算法的精度检测方法、装置、计算机设备和存储介质。
2、一种定位算法的精度检测方法,所述方法包括:
3、获取运动对象的实时点云图像;
4、采用实时定位算法,对所述实时点云图像和已构建的点云地图中的源点云图像进行匹配,得到所述运动对象的实时定位数据;
5、采用离线定位算法,对所述实时点云图像和所述点云地图中的源点云图像进行匹配,得到所述运动对象的离线定位数据;所述离线定位算法的定位精度大于所述实时定位算法的定位精度;
6、将所述离线定位数据作为实时定位数据的参考值,根据所述参考值和所述实时定位数据,确定所述实时定位数据的精度。
7、在其中一个实施例中,所述点云地图的构建方式,包括:
8、获取源点云图像,进行目标检测,得到源障碍物点云图像;
9、将所述源点云图像中的源障碍物点云图像滤除,根据所述滤除处理后的源点云图像构建点云地图。
10、在其中一个实施例中,所述获取源点云图像,进行目标检测,得到源障碍物点云图像,包括:
11、获取源点云图像,将所述源点云图像输入到训练好的目标检测模型,得到源障碍物点云图像;所述目标检测模型为根据包含有障碍物的点云样本图像训练得到的。
12、在其中一个实施例中,所述采用实时定位算法,对所述实时点云图像和已构建的点云地图中的源点云图像进行匹配,得到所述运动对象的实时定位数据,包括:
13、采用实时定位算法,对所述实时点云图像和已构建的点云地图中的源点云图像进行匹配,得到所述实时点云图像对应的源点云图像;
14、将所述实时点云图像对应的源点云图像的位置信息作为所述运动对象在所述点云地图中的实时定位数据。
15、在其中一个实施例中,所述采用离线定位算法,对所述实时点云图像和所述点云地图中的源点云图像进行匹配,得到所述运动对象的离线定位数据,包括:
16、获取实时点云图像,将所述实时点云图像输入到离线定位算法中训练好的目标检测模型,得到目标障碍物点云图像;
17、将所述目标障碍物点云图像从所述实时点云图像中滤除,得到滤除处理后的实时点云图像;
18、将所述滤除处理后的实时点云图像输入到离线定位算法中训练好的匹配模型,得到与所述滤除处理后的实时点云图像对应的源点云图像;所述匹配模型为根据实时点云图像和对应的源点云图像训练得到的;
19、将所述实时点云图像对应的源点云图像的位置信息作为所述运动对象的离线定位数据。
20、在其中一个实施例中,所述将所述滤除处理后的实时点云图像输入到训练好的匹配模型,计算所述滤除处理后的实时点云图像的匹配值,得到与所述滤除处理后的实时点云图像对应的源点云图像,包括:
21、根据所述滤除处理后的各个实时点云图像的匹配值的大小,筛选出所述匹配值最大的实时点云图像,将所述匹配值最大的实时点云图像对应的源点云图像作为匹配模型的输出。
22、在其中一个实施例中,所述匹配模型中静态物体点云的匹配值所对应的权重,高于动态物体点云的匹配值所对应的权重。
23、在其中一个实施例中,所述将所述离线定位数据作为实时定位数据的参考值,根据所述参考值和所述实时定位数据,确定所述实时定位数据的精度,包括:
24、获取所述实时定位数据与所述对应离线定位数据;
25、计算各个所述实时定位数据与所述对应离线定位数据的差值;
26、计算所述各个差值的平均值或加权平均值或中值,将所述平均值或加权平均值或中值作为所述定位算法的精度。
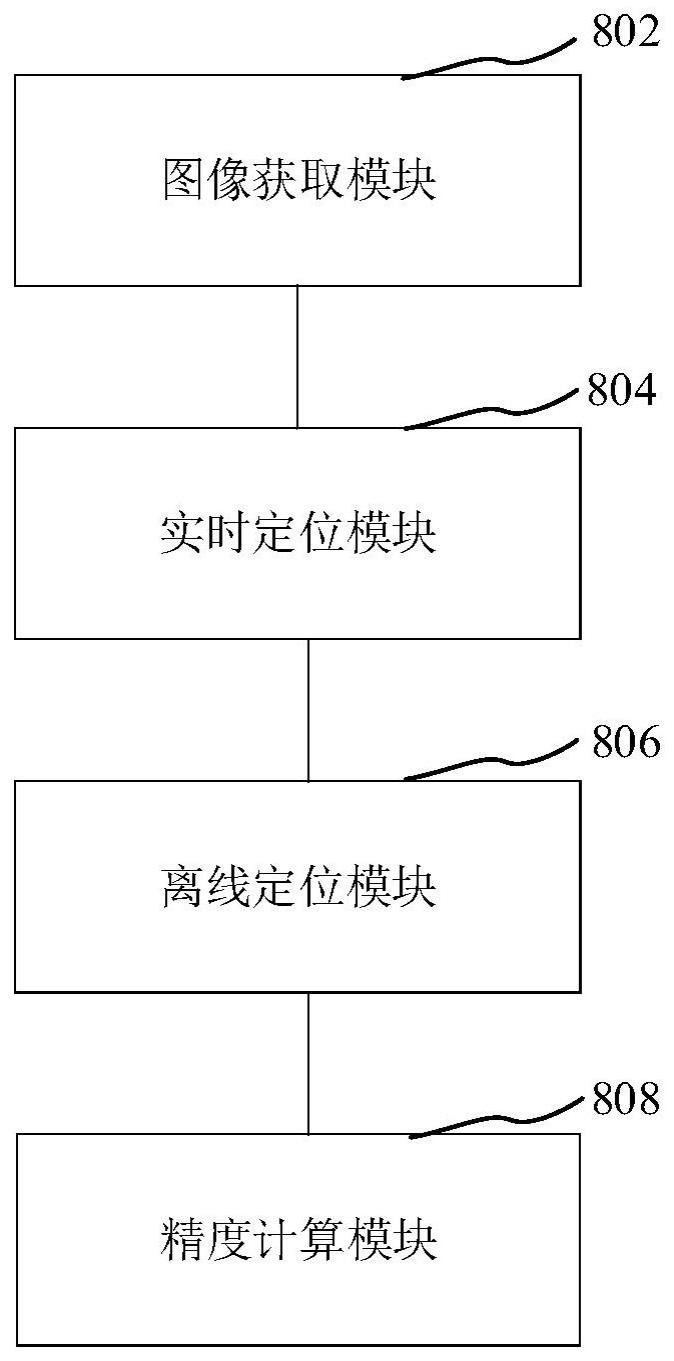
27、一种定位算法的精度检测装置,所述装置包括:
28、图像获取模块,用于获取运动对象的实时点云图像;
29、实时定位模块,用于采用实时定位算法,对所述实时点云图像和已构建的点云地图中的源点云图像进行匹配,得到所述运动对象的实时定位数据;
30、离线定位模块,用于采用离线定位算法,对所述实时点云图像和所述点云地图中的源点云图像进行匹配,得到所述运动对象的离线定位数据;所述离线定位算法的定位精度大于所述实时定位算法的定位精度;
31、精度计算模块,用于将所述离线定位数据作为实时定位数据的参考值,根据所述参考值和所述实时定位数据,确定所述实时定位数据的精度。
32、在其中一个实施例中,所述装置还包括地图构建模块;所述地图构建模块包括:
33、第一目标检测单元,用于获取源点云图像,进行目标检测,得到源障碍物点云图像;
34、第一障碍滤除单元,用于将所述源点云图像中的源障碍物点云图像滤除;
35、构建单元,用于根据所述滤除处理后的源点云图像构建点云地图。
36、在其中一个实施例中,所述目标检测单元还用于获取源点云图像,将所述源点云图像输入到训练好的目标检测模型,得到源障碍物点云图像;所述目标检测模型为根据包含有障碍物的点云样本图像训练得到的。
37、在其中一个实施例中,所述实时定位模块,包括:
38、图像匹配单元,用于采用实时定位算法,对所述实时点云图像和已构建的点云地图中的源点云图像进行匹配,得到所述实时点云图像对应的源点云图像;
39、数据获取单元,用于将所述实时点云图像对应的源点云图像的位置信息作为所述运动对象在所述点云地图中的实时定位数据。
40、在其中一个实施例中,所述离线定位模块,包括:
41、第二目标检测单元,用于获取实时点云图像,将所述实时点云图像输入到离线定位算法中训练好的目标检测模型,得到目标障碍物点云图像;
42、第二障碍滤除单元,用于将所述目标障碍物点云图像从所述实时点云图像中滤除,得到滤除处理后的实时点云图像;
43、图像匹配单元,用于将所述滤除处理后的实时点云图像输入到离线定位算法中训练好的匹配模型,得到与所述滤除处理后的实时点云图像对应的源点云图像,匹配模型为根据实时点云图像和对应的源点云图像训练得到的;
44、数据获取单元,用于将所述实时点云图像对应的源点云图像的位置信息作为所述运动对象的离线定位数据。
45、在其中一个实施例中,所述图像匹配单元还用于根据所述滤除处理后的各个实时点云图像的匹配值的大小,筛选出所述匹配值最大的实时点云图像,将所述匹配值最大的实时点云图像对应的源点云图像作为匹配模型的输出。
46、在其中一个实施例中,所述图像匹配单元还用于设置匹配模型中静态物体点云的匹配值所对应的权重,高于动态物体点云的匹配值所对应的权重。
47、在其中一个实施例中,所述精度计算模块包括:
48、数据获取单元,用于获取所述实时定位数据与所述对应离线定位数据;
49、差值计算单元,用于计算各个所述实时定位数据与所述对应离线定位数据的差值;
50、精度确定单元,用于计算所述各个的差值的平均值或加权平均值或中值,将所述平均值或加权平均值或中值作为所述定位算法的精度。
51、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述定位算法的精度检测步骤:
52、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述定位算法的精度检测步骤:
53、上述定位算法的精度检测方法、装置、计算机设备和存储介质,通过实时定位和离线定位,将离线定位数据作为实时定位数据的参考值,根据该参考值和对应的实时定位数据计算精度,实现了对运动对象的定位算法的精度检测。此外,采用更高精度的离线定位算法获取运动对象的离线定位数据,使得定位算法的精度检测更准确。
- 还没有人留言评论。精彩留言会获得点赞!