堰塞湖信息确定方法、系统、电子设备及存储介质与流程
本发明涉及堰塞湖应急处理,尤其涉及一种堰塞湖信息确定方法、系统、电子设备及存储介质。
背景技术:
1、堰塞湖是在地震、降雨等自然灾害的作用下,由滑坡体、泥石流堆积体、火山喷发物及溢流物等形成的横向堤坝堵塞山谷、河谷或河床后贮水而形成的湖泊。由于堰塞坝体无泄水通道,库内水位上涨速度快,同时堰塞坝体结构复杂,极易发生溃坝险情,严重威胁下游生命财产安全。因此,预测堰塞湖的溢坝时间,对于发现堰塞湖险情以及风险决策尤为重要。
2、相关技术中,可以通过水文监测、遥感监测以及无人机探测等方法预测堰塞湖的溢坝时间,但是此类方法不仅耗费人力物力,人员也难以确保安全抵达,而且实时采集的数据处理效率低且数据精度受限。因此,如何准确且快速预测堰塞湖溢坝时间成为目前亟需解决的技术问题。
技术实现思路
1、本发明提供一种堰塞湖信息确定方法、系统、电子设备及存储介质,用以解决现有技术预测堰塞湖的溢坝时间的方法耗费人力物力、人员难以确保安全抵达以及实时采集的数据处理效率低且数据精度受限的缺陷,实现准确且快速确定堰塞湖溢坝预估时间的目的。
2、本发明提供一种堰塞湖信息确定方法,包括:
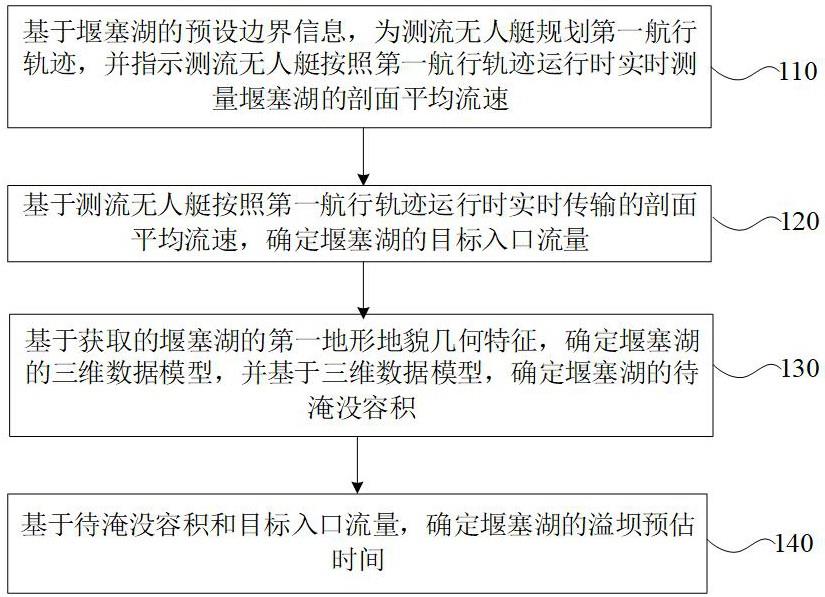
3、基于堰塞湖的预设边界信息,为测流无人艇规划第一航行轨迹,并指示所述测流无人艇按照所述第一航行轨迹运行时实时测量所述堰塞湖的剖面平均流速;
4、基于所述测流无人艇按照所述第一航行轨迹运行时实时传输的所述剖面平均流速,确定所述堰塞湖的目标入口流量;
5、基于获取的所述堰塞湖的第一地形地貌几何特征,确定所述堰塞湖的三维数据模型,并基于所述三维数据模型,确定所述堰塞湖的待淹没容积;
6、基于所述待淹没容积和所述目标入口流量,确定所述堰塞湖的溢坝预估时间。
7、根据本发明提供的一种堰塞湖信息确定方法,所述方法还包括:
8、基于所述预设边界信息,为测深无人艇规划第二航行轨迹,并指示所述测深无人艇按照所述第二航行轨迹运行时实时测量所述堰塞湖的深度;
9、基于所述测深无人艇按照所述第二航行轨迹运行时实时传输的多个所述深度,利用平均值法确定所述堰塞湖的目标平均深度;
10、基于所述目标平均深度和所述预设边界信息对应的目标水域面积,确定所述堰塞湖的目标容量。
11、根据本发明提供的一种堰塞湖信息确定方法,所述基于所述待淹没容积和所述目标入口流量,确定所述堰塞湖的溢坝预估时间,还包括:
12、基于所述待淹没容积和所述堰塞湖的目标容量,利用求和法确定所述堰塞湖的总容量;
13、基于所述总容量和所述目标水域面积,利用求和法确定所述堰塞湖的总深度;
14、基于所述总深度和所述目标平均深度,利用求差法确定所述堰塞湖的溢坝预估深度;
15、基于所述溢坝预估深度和所述目标水域面积,利用乘积法确定所述堰塞湖的溢坝预估容积;
16、基于所述溢坝预估容积和所述目标入口流量,利用比值法确定所述堰塞湖的溢坝预估时间。
17、根据本发明提供的一种堰塞湖信息确定方法,所述基于所述目标平均深度以及所述预设边界信息对应的目标水域面积,确定所述堰塞湖的目标容量,包括:
18、基于所述目标平均深度以及所述目标水域面积,利用乘积法确定所述堰塞湖的第一容量;
19、基于所述预设边界信息,为水下机器人规划第三航行轨迹,并指示所述水下机器人按照所述第三航行轨迹运行时实时测量所述堰塞湖的第二地形地貌几何特征;
20、基于所述水下机器人按照所述第三航行轨迹运行时实时传输的所述第二地形地貌几何特征,利用dem建模法确定所述堰塞湖的湖底数字高程模型,并基于所述湖底数字高程模型中各单元网格的容积,确定所述堰塞湖的第二容量;
21、在所述第一容量和所述第二容量之间的差值满足预设误差的情况下,确定所述第一容量或所述第二容量为所述目标容量。
22、根据本发明提供的一种堰塞湖信息确定方法,所述测深无人艇的数量为多个时,每个所述测深无人艇分别用于按照对应航行轨迹运行时,实时测量所述堰塞湖中对应子区域的第一深度;各所述子区域的拼接结果为所述堰塞湖的整个区域;
23、基于所述测深无人艇按照所述第二航行轨迹运行时实时传输的多个所述深度,利用平均值法确定所述堰塞湖的目标平均深度,包括:
24、基于每个所述测深无人艇按照所述对应航行轨迹运行时各自实时传输的多个所述第一深度,利用平均值法确定每个所述子区域的第一平均深度;
25、确定各所述第一平均深度的平均值,为所述目标平均深度。
26、根据本发明提供的一种堰塞湖信息确定方法,所述方法还包括:
27、确定每个所述子区域对应的第一水域面积;
28、基于每个所述第一水域面积和每个所述子区域的第一平均深度,利用乘积求和法确定所述堰塞湖的第一容量;各所述第一水域面积的面积之和,为所述预设边界信息对应的目标水域面积。
29、根据本发明提供的一种堰塞湖信息确定方法,所述堰塞湖的预设边界信息的确定过程包括:
30、对所述三维数据模型进行栅格化,确定所述堰塞湖的栅格图,并将所述栅格图的边界信息确定为所述预设边界信息。
31、根据本发明提供的一种堰塞湖信息确定方法,所述方法还包括:
32、基于所述目标平均深度以及预设时间间隔,利用比值法确定所述堰塞湖的水位上升速度。
33、本发明还提供一种堰塞湖信息确定系统,包括测流无人艇和电子设备,所述电子设备与所述测流无人艇之间无线连接;
34、所述电子设备,用于基于堰塞湖的预设边界信息,为所述测流无人艇规划第一航行轨迹,并指示所述测流无人艇按照所述第一航行轨迹运行时实时测量所述堰塞湖的剖面平均流速;
35、所述测流无人艇,用于按照所述第一航行轨迹运行时实时测量所述堰塞湖的剖面平均流速,并将实时测量的所述剖面平均流速传输至所述电子设备;
36、所述电子设备,还用于基于所述测流无人艇按照所述第一航行轨迹运行时实时传输的所述剖面平均流速,确定所述堰塞湖的目标入口流量;
37、所述电子设备,还用于基于获取的所述堰塞湖的第一地形地貌几何特征,利用三维建模法确定所述堰塞湖的三维数据模型,并基于所述三维数据模型,确定所述堰塞湖的待淹没容积;
38、所述电子设备,还用于基于所述待淹没容积和所述目标入口流量,确定所述堰塞湖的溢坝预估时间。
39、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述堰塞湖信息确定方法。
40、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述堰塞湖信息确定方法。
41、本发明提供的堰塞湖信息确定方法、系统、电子设备及存储介质,其中堰塞湖信息确定方法,首先基于堰塞湖的预设边界信息,为测流无人艇规划第一航行轨迹,然后在测流无人艇按照第一航行轨迹运行时,实时接收测流无人艇传输的堰塞湖的剖面平均流速并实时确定堰塞湖的目标入口流量;与此同时,基于获取的堰塞湖的第一地形地貌几何特征,确定堰塞湖的三维数据模型,并基于三维数据模型,确定堰塞湖的待淹没容积;最后基于实时确定的待淹没容积和目标入口流量,确定堰塞湖的溢坝预估时间。以此能够在测流无人艇沿第一航行轨迹运行的过程中,边运行边确定堰塞湖的溢坝预估时间,实现了准确且快速确定堰塞湖溢坝预估时间的目的,为后续对堰塞湖进行风险判决和应急处置决策提供充分依据和可靠保障。进一步的,堰塞湖的溢坝预估时间的整个确定过程利用了测流无人艇的自主航行和实时传输测量结果,不仅节省了人力物力,还能确保人员安全,同时也提高了确定堰塞湖溢坝时间的准确性和及时性。
- 还没有人留言评论。精彩留言会获得点赞!