数字雷达转模拟图像扫描线补偿方法、装置及存储介质与流程
本发明涉及雷达信号处理领域,具体涉及一种数字雷达转模拟图像扫描线补偿方法、装置及存储介质,适用于船舶运动状态下将数字雷达图像转成模拟格式的应用场景。
背景技术:
1、船用雷达是一种应用于船舶航行、进行周围环境监测与辅助避碰的设备,工作时定向天线辐射并接收电磁波,通过旋转天线完成周围环境360°的探测,并经过触发信号、船首信号、正北信号(选配)、方位信号、视频信号,以模拟电平的方式下发,由雷达处理单元将这几路模拟电平信号转化成数字网络格式的视频数据,通过显控终端完成图像的显示。其中,触发信号表示脉冲产生,船首信号表示天线旋转至天线方向零位,正北信号表示天线旋转至正北方位,方位信号表示天线旋转过程中所处的各个方位,视频信号则表示此刻方位下的模拟视频图像。
2、数字雷达相比与传统的雷达,其将雷达信息处理单元集成在收发机内部,取代了传统的触发信号、船首信号、正北信号、方位信号、视频模拟信号,直接以数字网络格式输出雷达图像。数字网络接口取代模拟接口,精简了设备连接,给调试和维护带来极大便利,也带来了设备兼容性问题,如电子海图等设备沿用旧的雷达模拟接口,无法直接接收数字格式的网络视频信号,此时对数字导航雷达网络格式图像重新转换为模拟格式提出了要求与使用场景。
3、由于数字雷达的网络扫描线每个天线旋转周期通常只有1000-1800个数据包,而模拟格式的方位脉冲信号每个天线旋转周期却有4096个脉冲,这就意味着并不是每个模拟方位上都对应于数字扫描线产生。因此在数字转模拟的过程中,需要对数字扫描线进行倍频,才能达到4096个脉冲的计数。比如常见的数字雷达扫描线每周期1024个数据包,需4倍频才能占满全部模拟型号的方位。
4、当本船存在转向、摆动等运动时,正北信号受本船运动的影响会产生时间上的偏移,此时两个正北脉冲间的方位脉冲数量会动态改变。具体地,当本船存在顺时针转动时,由于第二个正北方位提前到达,相邻两正北之间的方位脉冲会变少,即达不到4096个;当本船存在逆时针转动时,由于第二个正北方位延迟到达,相邻两个正北之间的方位脉冲会变多,即多于4096个。
5、传统模拟信号由于每个方位脉冲对应360/4096≈0.088°,24个方位脉冲的变化才会带来0.088°*24-2.11°的误差角度,但是当采用数字扫描线转换模拟信号时,由于4倍频运算的存在,仅需6条数字扫描就会引起2.11°的误差角度,该误差在图像上表现为当本船顺时针旋转时,在图像正北处存在某个小缺角,旋转越快,缺角越大;当本船逆时针旋转时,超过图像北向上方位时存在小角度回转,旋转越快,回转角度越大。
6、值得注意的是,采用模拟信号传输图像的方式,仍存在运动场景下正北信号到达时刻改变问题,只是由于方位脉冲数量多,单脉冲对应角度小,需较多数量才能在图像上呈现明显的缺角或回转。但是数字格式的扫描线数量少,存在4倍频过程,每条数字扫描线对应0.088°*4=0.352°的方位,即便本船慢速转动,仅丢失几条扫描线便会产生明显影响。
7、针对以上问题,现有方法采用将收发机下发的1024条数字扫描线插值到4096条,然后1:1转化为模拟信号的方式来处理。该插值操作通常由上位机软件完成,上位机将插值后的数据转发至下位机,由下位机1:1转化为模拟信号。该方法需要根据扫描线方位增长情况选择插值位置,并且由于每条数字扫描线大小为1-2k,下位机需要较大的内存才能缓存够整圈,必要时甚至需要外挂ddr内存,资源消耗较大。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种数字雷达转模拟图像扫描线补偿方法、装置及存储介质,通过补偿数字扫描线的条数,使其保证最近两个相同方位的数字扫描线数据包个数为1024个,然后仅由下位机进行方位信号倍频,实现船舶运动条件下的图像补偿。
2、本发明的技术目的是通过以下技术方案实现的:
3、数字雷达转模拟图像扫描线补偿方法,该方法包括以下步骤:
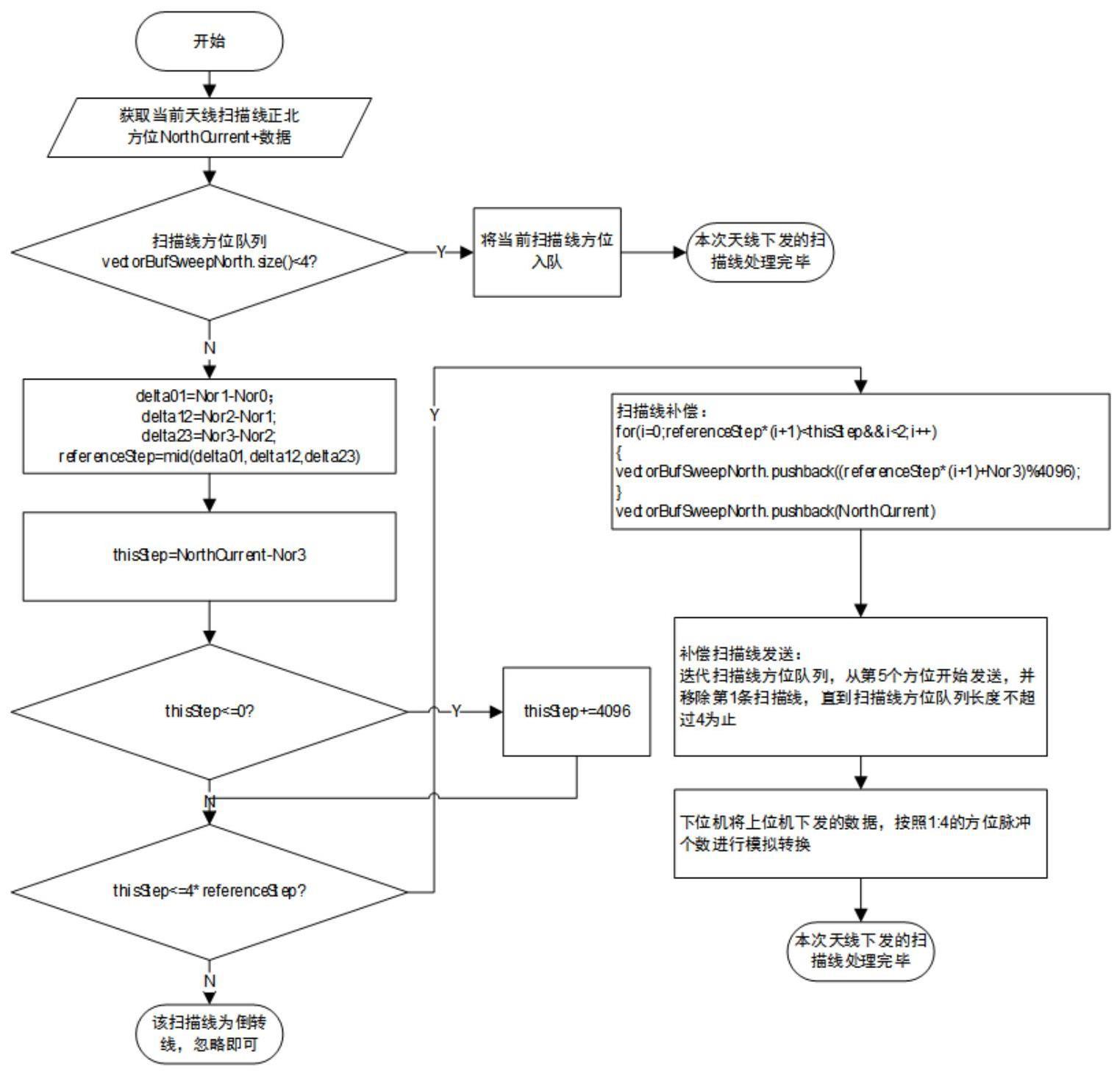
4、s1、上位机根据数字雷达下发的数据获取当前数字扫描线的正北方位;
5、s2、若当前数字扫描线所在的扫描线方位存储队列长度小于n,n≥4,将当前数字扫描线的正北方位存储入扫描线方位存储队列;若当前数字扫描线所在的扫描线方位存储队列长度大于等于n,则进行下一步;
6、s3、上位机获取数字雷达下发的当前数字扫描线的前4条数字扫描线,以队列的数据结构存储当前数字扫描线的前4条数字扫描线的正北方位;
7、s4、分别计算当前数字扫描线的前4条数字扫描线正北方位之间的步长,步长=后一数字扫描线正北方位-前一数字扫描线正北方位,计算得到前4条数字扫描线正北方位之间的步长的中值并将中值作为当前数字扫描线补偿的理论步进增量;
8、s5、补偿判定:如果当前数字扫描线正北方位的步长大于0且不超过设定的补偿判定值,则进行数字扫描线补偿;
9、s6、数字扫描线补偿时,每条补偿的数字扫描线的正北方位的步长为理论步进增量,且补偿的数字扫描线的正北方位小于当前数字扫描线的正北方位;
10、s7、将补偿的数字扫描线正北方位插入当前数字扫描线正北方位所在扫描线方位存储队列中当前数字扫描线正北方位的前侧;
11、迭代扫描当前数字扫描线所在的扫描线方位存储队列,获取补偿的数字扫描线的正北方位及当前数字扫描线的正北方位并发送至下位机;
12、s8、下位机根据接收到的数字扫描线生成模拟格式信号,将方位脉冲进行1:4的倍频,下位机输出4096个脉冲输出。
13、进一步地,在步骤s5中,若当前数字扫描线正北方位的步长大于设定的补偿判定值,忽略该扫描线;若当前数字扫描线正北方位的步长小于等于0,进行取模修正后进行补偿判定。
14、进一步地,在步骤s5中进行取模修正时,当前数字扫描线正北方位的步长+4096进行修正。
15、进一步地,步骤s6中,补偿的数字扫描线的正北方位=当前数字扫描线的前一条数字扫描线的正北方位+理论步进增量*(i+1),i=0、1。
16、进一步地,补偿判定值=n*理论步进增量。
17、进一步地,在步骤s7中,迭代扫描时每次取扫描线方位存储队列中第5个数字扫描线正北方位并将第一个数字扫描线正北方位剔除,迭代扫描至扫描线方位存储队列长度不超过4。
18、本发明还提供了一种数字导航雷达转模拟图像装置,用于船舶导航,包括数字雷达、上位机、下位机,上位机按照上述的数字雷达转模拟图像扫描线补偿方法将从数字雷达获取的数字扫描线正北方位处理后发送至下位机。
19、本发明另外还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序运行时执行上述的数字雷达转模拟图像扫描线补偿方法中步骤s1-步骤s7。
20、相比与现有技术,本发明的有益效果在于:
21、1、本发明的方法使得上位机发送至下位机的扫描线的线束保持在1024条,下位机接收上位机下发的扫描线后仅需对应方位脉冲进行倍频处理即可实现4096个方位脉冲的输出,相较于上位机下发4096条扫描线,数据量小、存储占用低、对硬件资源的消耗可以降低至1/4。
22、2、数字数字雷达旋转周期约2.4s,若数字扫描线以4096条发送,则每条扫描线占用时间约为2.4/4096=585us,该时间窗口理论可实现最远300m/us*585us/2≈47nm的转换距离,若数字扫描线以1024条发送,则可实现最远47*4=188nm的转换距离。
23、3、模拟格式的视频信号需借助da转芯片输出,并由下位机进行时序控制,每个数字雷达旋转周期1024条扫描线降低了da芯片的速率要求,可以1/4的时钟频率控制芯片工作,降低了器件选型的成本,利于时序的综合。
- 还没有人留言评论。精彩留言会获得点赞!