一种确定光机后焦的系统及方法与流程
本技术涉及vr设备测试,尤其涉及一种确定光机后焦的方法及系统。
背景技术:
1、虚拟现实(vr,virtual reality)设备凭借其良好的交互性,越来越受到用户的青睐。
2、光机是虚拟现实设备中用于观察投影屏幕的光学组件,是影响vr设备尺寸及质量的重要部件,为确保vr设备的质量,需要对光机的各项参数指标进行测试。对于光机来说,虚像距会直接影响vr产品的体验效果,而光机后焦(光机中透镜与显示屏之间的距离)是影响虚像距的重要参数指标。
3、但是现有技术中无法确定出光机后焦,进而无法对光机后焦进行测试,导致光机质量无法得到确保。
技术实现思路
1、针对现有技术存在的问题,本发明实施例提供了一种确定光机后焦的系统及方法,以解决或者部分解决现有技术中无法确定出光机后焦,进而无法对光机后焦进行测试,导致光机质量无法得到确保的技术问题。
2、本发明实施例的第一方面,提供一种确定光机后焦的系统,所述系统包括:待测光机、光学测试模组及摄像模组;所述待测光机与所述光学测试模组可组合成第一光学模组,所述待测光机与所述摄像模组可组合成第二光学模组;其中,
3、利用所述第一光学模组和所述第二光学模组对确定所述待测光机的后焦时,在所述第一光学模组中,控制所述待测光机的第一镜片向所述光学测试模组方向移动,直至确定所述第一镜片移动至第一目标位置;所述第一目标位置为所述光学测试模组对待测光机显示屏拍摄的图像为最清晰实像时第一镜片所处的位置;
4、在所述第二光学模组中,控制所述第一镜片向所述显示屏方向移动,直至确定所述第一镜片移动至第二目标位置时,获取所述第一镜片移动的距离;所述第二目标位置为所述摄像模组对所述显示屏拍摄的图像为最清晰虚像时第一镜片所处的位置;
5、根据所述第一目标位置与所述第一镜片移动的距离确定所述待测光机的后焦。
6、上述方案中,所述待测光机,放置在测试台架的台面上;
7、光学测试模组,安装在所述测试台架的移动机构上;
8、摄像模组,安装在所述测试台架的移动机构上;
9、上述方案中,所述待测光机包括:
10、第一镜片,安装在镜片支架上,所述镜片支架安装在镜筒内;
11、第二镜片,安装在镜筒上,所述第二镜片上设置有光学复合膜;
12、调焦环,安装在所述镜筒外侧,所述调焦环与所述第一镜片相连接;
13、显示屏,安装在屏幕支架上,所述屏幕支架与所述镜筒相连接。
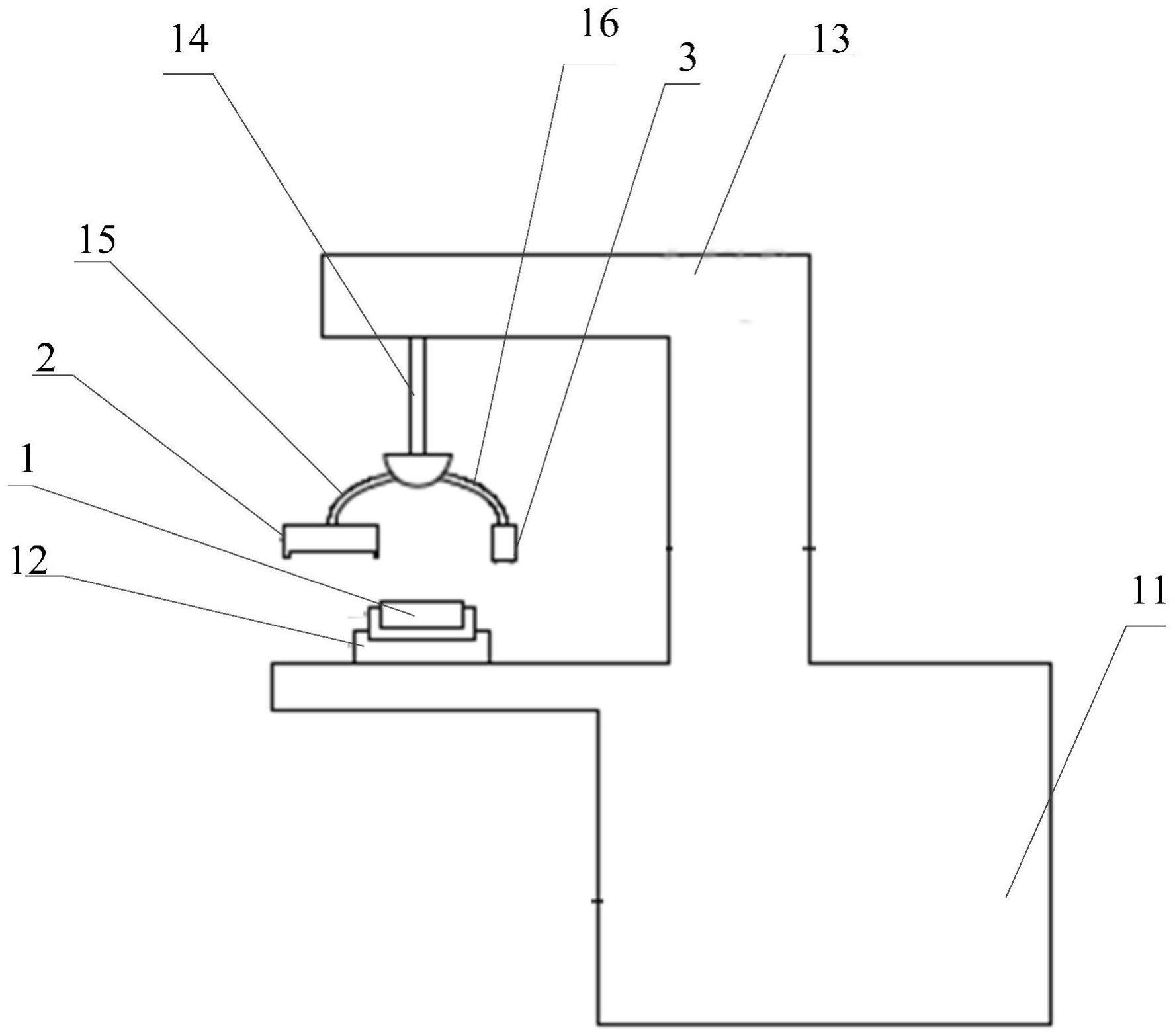
14、上述方案中,所述测试台架包括:
15、基座、治具、支臂和移动机构;
16、所述治具安装在所述基座的台面上,所述治具用于固定所述待测光机;
17、所述支臂安装在所述基座上;所述移动机构包括旋转轴、第一抓臂和第二抓臂,所述旋转轴的一端与所述支臂相连;所述第一抓臂安装在所述旋转轴的另一端,所述第一抓臂的一端安装有所述光学测试模组;所述第二抓臂安装在所述旋转轴的另一端,所述第二抓臂的一端安装有所述摄像模组。
18、上述方案中,所述光学测试模组包括:
19、基板;
20、连接器,与所述基板的一端电连接,所述连接器用于传输图像数据;
21、连接支架,安装在所述基板的一侧面,用于将所述待测光机与所述光学测试模组进行连接;
22、滤光片,安装在所述连接支架上;
23、感光部件,安装在所述基板的朝向所述滤光片的一侧面,且位于所述基板与所述滤光片之间。
24、本发明的第二方面,提供一种确定光机后焦的方法,应用在上述第一方面中任一项所述的系统中,所述方法包括:
25、当待测光机与光学测试模组组合成第一光学模组时,控制所述待测光机的第一镜片向所述光学测试模组方向移动,直至确定所述第一镜片移动至第一目标位置;所述第一目标位置为所述光学测试模组对待测光机显示屏拍摄的图像为最清晰实像时第一镜片所处的位置;
26、当摄像模组与所述待测光机组合成第二光学模组,控制所述第一镜片向所述显示屏方向移动,直至确定所述第一镜片移动至第二目标位置时,获取所述第一镜片移动的距离;所述第二目标位置为所述摄像模组对所述显示屏拍摄的图像为最清晰虚像时第一镜片所处的位置;
27、根据所述第一目标位置与所述第一镜片移动的距离确定所述待测光机的后焦。
28、上述方案中,所述根据所述第一目标位置与所述第一镜片运动的距离确定所述待测光机的后焦,包括:
29、根据公式以及公式d=u+v确定u的值;所述u为在所述第一光学模组中,所述第一镜片移动至第一目标位置时,第一镜片与所述显示屏之间的距离;所述d为在所述第一光学模组中,光学测试模组的感光芯片与所述显示屏之间的距离;所述f为所述待测光机的焦距;
30、根据所述第一镜片运动的距离及所述第一镜片与所述显示屏之间的距离确定所述待测光机的后焦。
31、上述方案中,所述根据所述第一镜片运动的距离及所述第一镜片与所述显示屏之间的距离确定所述待测光机的后焦,包括:
32、根据公式h=u-h确定所述待测光机的后焦h;其中,
33、所述u为在所述第一光学模组中,所述第一镜片移动至第一目标位置时,第一镜片与所述显示屏之间的距离;所述h为在所述第二光学模组中,所述第一镜片运动的距离。
34、上述方案中,所述确定所述第一镜片移动至第一目标位置,包括:
35、控制所述显示屏为点亮状态;
36、在所述第一光学模组中,当所述第一镜片朝向所述光学测试模组移动时,控制所述光学测试模组按照预设频率对所述显示屏进行拍照,获得多个第一图像;
37、在所述多个第一图像中确定出最清晰第一图像,将最清晰第一图像对应的第一镜片的位置确定为所述第一目标位置。
38、上述方案中,所述确定所述第一镜片移动至第二目标位置,包括:
39、控制所述显示屏为点亮状态;
40、在所述第二光学模组中,当所述第一镜片背向所述摄像模组移动时,控制所述摄像模组按照预设频率对所述显示屏进行拍照,获得多个第二图像;
41、在所述多个第二图像中确定出最清晰第二图像,将最清晰第二图像对应的第一镜片的位置确定为所述第二目标位置。
42、本发明提供了一种确定光机后焦的系统及方法,系统包括:待测光机、光学测试模组及摄像模组;所述待测光机与所述光学测试模组可组合成第一光学模组,所述待测光机与所述摄像模组可组合成第二光学模组;其中,利用所述第一光学模组和所述第二光学模组对确定所述待测光机的后焦时,在第一光学模组中,控制所述待测光机的第一镜片向所述光学测试模组方向移动,直至确定所述第一镜片移动至第一目标位置;所述第一目标位置为所述光学测试模组对待测光机显示屏拍摄的图像为最清晰实像时第一镜片所处的位置;在第二光学模组中,控制所述第一镜片向所述显示屏方向移动,直至确定所述第一镜片移动至第二目标位置时,获取所述第一镜片移动的距离;所述第二目标位置为所述摄像模组对所述显示屏拍摄的图像为最清晰虚像时第一镜片所处的位置;根据所述第一目标位置与所述第一镜片移动的距离确定所述待测光机的后焦;如此,可利用第一光学模组找到待测光机中第一镜片的位置,以及在第二光学模组中获取第一镜片移动的距离,从而确定出待测光机的后焦,进而可判断后焦是否满足产品要求,确保待测光机的质量。
- 还没有人留言评论。精彩留言会获得点赞!