一种基于嵌入式软件的光电平台跟踪延迟时间的测试方法与流程
本技术涉及光电平台,具体涉及一种基于嵌入式软件的光电平台跟踪延迟时间的测试方法。
背景技术:
1、在光电平台跟踪系统中,光电平台的跟踪延迟时间是指从探测器曝光输出经过电路传输及图像处理到伺服控制系统的接收所需要的时间,该测试可以从系统级的层面得到实际的跟踪延迟时间,相比传统方法更加准确、可靠。准确的跟踪延迟时间有利于帮助验证光电平台的伺服控制系统是否能够快速、准确的响应控制指令,以及平台的跟踪性能是否满足系统要求,光电平台涉及多个分系统,依次为成像探测器分系统、电路传输分系统、图像跟踪处理分系统与伺服控制分系统四个部分,但现有技术中,在对延迟时间进行计算的时候,是分阶段进行计算的,即成像探测器会将自己计算出的延迟时间传输至电路传输延迟系统中,并与电路传输延时计算的时间做加和,然后再将加和之后的延迟时间输入至图像跟踪处理算法中,在加上图像跟踪处理算法本身的处理时间,即为总的延迟时间,然后再将该总的延迟时间输入光电平台伺服控制系统中,光电平台伺服控制系统会根据该总的延迟时间进行对应的参数修改;
2、但在进行跟踪能力测试时,多个分系统之间的相互耦合和相互作用,无法准确的测试出平台跟踪控制性能,例如,成像探测器的帧频越高,图像传输的延迟越小,图像跟踪处理算法和平台控制算法的效率越高,这些因素都会影响光电平台的跟踪能力。然而,在测试时,这些因素之间的相互耦合可能会掩盖光电平台的实际跟踪控制性能,导致最终得到的延迟时间不准确。
技术实现思路
1、本技术的目的是针对以上问题,提供一种基于嵌入式软件的光电平台跟踪延迟时间的测试方法,包括如下步骤:
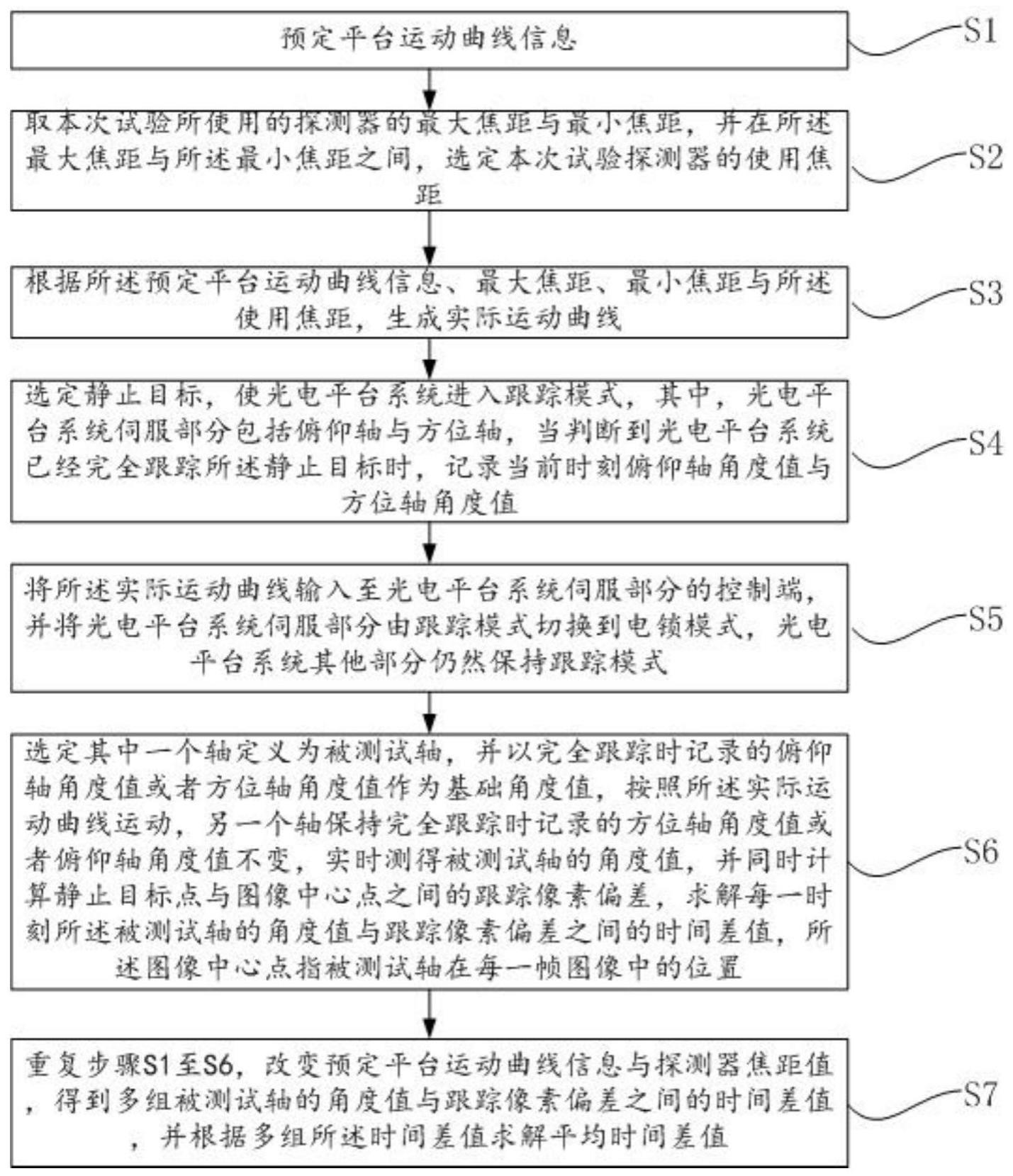
2、s1、预定平台运动曲线信息;
3、s2、获取本次试验所使用的探测器的最大焦距与最小焦距,并在所述最大焦距与所述最小焦距之间,选定本次试验探测器的使用焦距;
4、s3、根据所述预定平台运动曲线信息、最大焦距、最小焦距与所述使用焦距,生成实际运动曲线;
5、s4、选定静止目标,使光电平台系统进入跟踪模式,其中,光电平台系统伺服部分包括俯仰轴与方位轴,当判断到光电平台系统已经完全跟踪所述目标时,记录当前时刻俯仰轴角度值与方位轴角度值;
6、s5、将所述实际运动曲线输入至光电平台系统伺服部分的控制端,并将光电平台系统伺服部分由跟踪模式切换到电锁模式,光电平台系统其他部分仍然保持跟踪模式;
7、s6、选定其中一个轴定义为被测试轴,并以完全跟踪时记录的俯仰轴角度值或者方位轴角度值作为基础角度值,按照所述实际运动曲线运动,另一个轴保持完全跟踪时记录的方位轴角度值或者俯仰轴角度值不变,实时测得被测试轴的角度值,并同时计算静止目标点与图像中心点之间的跟踪像素偏差,求解每一时刻所述被测试轴的角度值与跟踪像素偏差之间的时间差值,所述图像中心点指被测试轴在每一帧图像中的位置;
8、s7、重复步骤s1至s6,改变预定平台运动曲线信息与探测器焦距值,得到多组被测试轴的角度值与跟踪像素偏差之间的时间差值,并根据多组所述时间差值求解平均时间差值。
9、根据本技术实施例提供的技术方案,根据以下公式计算得到跟踪像素偏差;
10、
11、其中:为跟踪像素偏差;
12、为光电平台系统伺服部分电锁模式之后静止目标在图像中的位置;
13、为光电平台系统伺服部分电锁模式之后被测试轴在每一张图像中的中心点。
14、根据本技术实施例提供的技术方案,所述平台运动曲线信息包括平台运动曲线幅值与目标频率值,其表达式如下:
15、θgoal=θ0-amp*cos(2*pi*frqgoal*timecnt)
16、其中:θgoal表示平台运动曲线角度值;
17、θ0为完全跟踪后,光电平台当前角度值;
18、amp为平台运动曲线幅值;
19、pi为π;
20、fregoal为频率值;
21、timegoal为以控制周期为增量累加的计数器值。
22、根据本技术实施例提供的技术方案,所述实际运动曲线的表达式如下:
23、θreal=θgoal*zoomreal/zoommin
24、其中:θreal表示实际运动曲线的角度值;
25、zoommin为探测器的最小焦距;
26、zoomreal为探测器的使用焦距,且zoommin≤zoomreal≤zoommax;
27、zoommax为探测器的最大焦距。
28、根据本技术实施例提供的技术方案,所述选定静止目标,控制光电平台系统进入跟踪模式的步骤之后还包括:
29、实时计算第一像素偏差,当判断第一像素偏差小于第一预设阈值时,则判定所述光电平台系统已经完全跟踪所述目标;
30、所述第一像素偏差的计算公式如下:
31、
32、其中:为跟踪像素偏差;
33、为完全跟踪之前静止目标在图像中的位置;
34、为完全跟踪之前被测试轴在每一张图像中的中心点。
35、与现有技术相比,本技术的有益效果:本技术提前设定好平台运动曲线的信息,然后在获取本次试验所使用探测器的最大焦距与最小焦距,并在两者之间选定本次试验使用的实际焦距,然后根据平台运动曲线信息、最大焦距、最小焦距与使用焦距,生成平台的实际运动曲线,然后选定静止目标,使光电平台进入到跟踪模式,其中,光电平台系统伺服部分包括俯仰轴与方位轴,当判断到光电平台已经完全跟踪到静止目标时,记录当前时刻俯仰轴角度值与方位轴角度值,再将实际运动曲线输入至光电平台系统伺服部分的控制端,并将其切换至电锁模式,然后选定其中一个轴定义为被测试轴,并以完全跟踪时记录的俯仰轴角度值或者方位轴角度值作为基础角度值,按照实际运动曲线进行运动,另外一个轴保持完全跟踪时记录的方位轴角度值或者俯仰轴角度值不变,实时测得被测试轴的角度值,并计算静止目标点与图像中心点之间跟踪像素偏差,求解他们之间的时间差值,重复上述步骤,通过改变平台运动曲线信息与探测器焦距值的大小,得到多组时间差值,并求解平均时间差值;
36、在使用过程中,本技术首先要预定平台运动曲线信息,然后获取本次试验探测器的最大焦距与最小焦距,选定本次试验所使用的焦距,并根据预定平台运动曲线信息生成实际运动曲线,然后选定静止目标,并控制光电平台系统进入到跟踪模式,光电平台伺服系统包括俯仰轴与方位轴,当判断到光电平台已经完全跟踪到目标后,记录当前时刻,俯仰轴角度值与方位轴角度值,然后将实际运动曲线输入至光电平台的伺服系统控制端,并同时控制光电平台伺服系统进入到电锁模式,然后选择其中一个轴,将该轴定义为被测试轴,并以完全跟踪时记录的角度值作为基础角度值,按照实际运动曲线进行运动,并且实时测得被测试轴的角度值,并同时计算静止目标点与图像中心点之间的像素偏差,求解每一时刻被测试轴的角度值与跟踪像素偏差之间的时间差值,该时间差值即为延迟时间,然后重复上述步骤,通过改变预定平台运动曲线信息与探测器焦距值的大小,得到多组被测试轴的角度值与跟踪像素偏差之间的时间差值,并根据多组时间差值,求解平均时间差值,该平均时间差值即为最终所求得的平均延迟时间;
37、本技术通过将光电平台的各个子系统作为整体来考虑,来计算其延迟时间,可以避免各个子系统之间因为相互耦合与相互配合所掩盖的光电平台的实际跟踪控制性能,从而得到更精确的延迟时间;同时,采用嵌入式软件生成运动曲线,将光电平台的跟踪链路按照一个系统整体考虑,降低了试验成本,便于实验室条件下的测试;并且市级运动轨迹的幅值、频率与跟踪视场焦距可以按照实际需要进行设置,方便调节,满足跟踪目标不同运动情况下跟踪延迟测试,适用性强,并且,本技术所述的方法无需增加硬件电路模块,可以直接将测试结果通过上位机进行大量重复测试,方法简单、可靠,还提高了测试效率。
- 还没有人留言评论。精彩留言会获得点赞!