单极子/交叉环天线方向图测量和测向误差估计方法及系统
本发明属于高频雷达方位角估计,具体涉及一种单极子/交叉环天线方向图测量和测向误差估计方法及系统。
背景技术:
1、高频地波雷达利用垂直极化电磁波在海面绕射传播衰减小的特点,可以实现大范围、全天候、超视距、实时连续的海洋表面动力学参数观测,广泛应用于海洋遥感以及海面目标探测领域。早期的高频地波雷达多为相控阵形式,其波束较窄,方位分辨率高,但是占地面积较大,需要较高的维护成本。针对上述缺点,紧凑型高频地波雷达采用单极子/交叉环形式的接收天线,其占地面积小、架设要求低、维护方便,此外,它通过多重信号分类算法(music)可以达到较高的方位测量精度,更受业内青睐。目前以美国codar公司seasonde系统和武汉大学osmar-s系统为代表的紧凑型高频地波雷达系统,已在世界范围内得到广泛应用。
2、在实际应用中,雷达系统自身的通道不一致性和周围环境引起的方向图畸变会严重影响方位角估计精度,目前解决这个问题最有效的方式是测量天线的真实畸变方向图以获得其不同方位上的幅相响应,并利用该实测方向图估计信号方位。受上述解决思路的启发,传统方法利用车载、船载、人工负载应答器环绕天线移动实现方向图测量;针对应答器移动轨迹受天线架设环境限制的缺点,中国专利cn202010456794.8,名称“基于无人机的线性调频雷达天线方向图测量系统及方法”公布了一种利用无人机搭载轻便式信号源测量天线方向图的方法,该方法虽然操作更为简便,但同样存在接收信号强度不稳定以及gps定位误差问题;中国专利cn103837867a,名称“一种利用ais信息进行高频雷达天线通道校正的方法”描述了一种借助船舶辅助信息计算天线方向图的方法,受船舶分布的影响,该方法不能保证收集到所有角度范围的信号,最终测得的天线方向图需要经过插值处理。
3、由上述分析可知,在天线方向图的测量过程中,由于测量手段的局限性,测量误差不可避免,而大部分已有研究将实测方向图视为真实畸变方向图,忽略了测量误差对方位估计的影响。
技术实现思路
1、针对现有技术的不足,本发明提供一种单极子/交叉环天线方向图测量和测向误差估计方法及系统,利用单极子/交叉环天线的多次方向图测量结果估计真实畸变方向图,计算方向图的测量误差,根据多重信号分类算法,基于实测天线方向图及其测量误差估计测向误差。
2、为了实现上述目的,本发明提供一种单极子/交叉环天线方向图测量和测向误差估计方法,包括以下步骤:
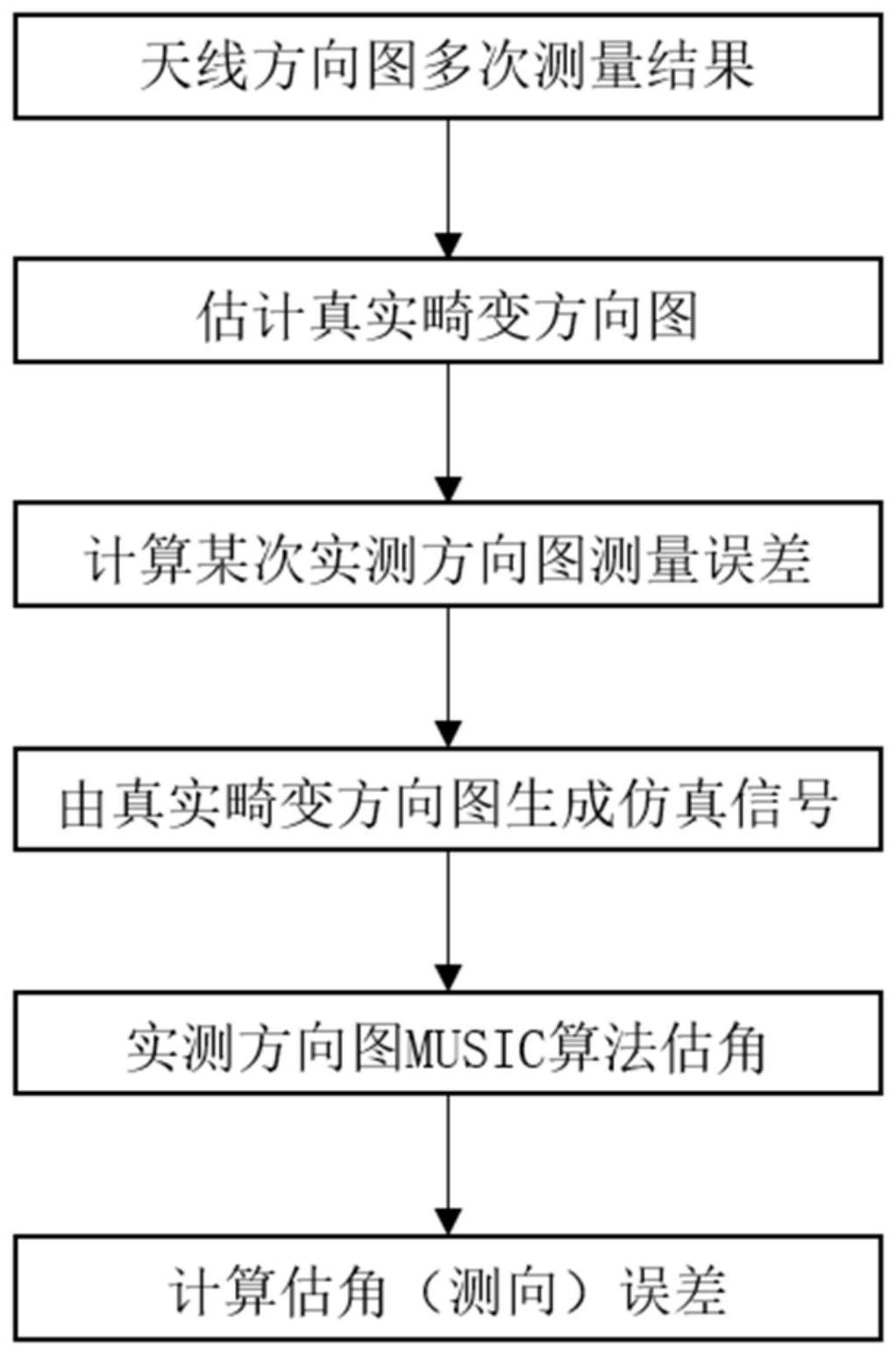
3、步骤1,获取实际环境中雷达天线方向图的多次测量结果,计算多次方向图实测结果的均值作为真实的畸变天线方向图;
4、步骤2,计算某次实测天线方向图与两环通道真实畸变天线方向图的差值,得到某次测量中两环通道天线方向图的测量误差;
5、步骤3,根据真实畸变方向图生成雷达接收回波信号,利用某次实测方向图,采用多重信号分类算法对任一方位的接收回波信号进行方位角估计;
6、步骤4,计算步骤3所述任一方位回波信号的方位角估计结果与真实方位的差值,得到方位角估计误差的大小。
7、而且,所述步骤1中实际环境中单极子/交叉环天线方向图的多次测量结果定义为:
8、adi(θ)=[1,g2i(θ)cos(θ+π/4),g3i(θ)sin(θ+π/4)],i=1,2,3,...,n(1)
9、式中,adi(θ)表示第i次测量得到的实测天线方向图,θ为方位角,g2i(θ)为第i次测量中cos环的畸变因子,即cos环通道相对第一天线通道的幅相差异,g3i(θ)为第i次测量中sin环的畸变因子,即sin环通道相对第一天线通道的幅相差异,π为圆周率,n为天线方向图总测量次数。
10、单极子/交叉环天线的真实畸变方向图由下式计算得到:
11、
12、式中,ar(θ)为真实畸变天线方向图,adi(θ)表示第i次测量得到的实测天线方向图,θ为方位角,n为天线方向图总测量次数。
13、而且,所述步骤2中根据步骤1定义求得两环通道的真实畸变方向图为arb(θ)和ara(θ),分别计算某次实测天线方向图与两环通道真实畸变天线方向图的差值为ar(θ)-adi(θ),则某次测量中两环通道方向图的测量误差可由下式计算得到:
14、g2i(θ)cos(θ+π/4)-arb(θ)=e2i(θ)g2i(θ)cos(θ+π/4) (3)
15、g3i(θ)sin(θ+π/4)-ara(θ)=e3i(θ)g3i(θ)sin(θ+π/4) (4)
16、式中,g2i(θ)为第i次测量中cos环的畸变因子,g3i(θ)为为第i次测量中sin环的畸变因子,e2i(θ)为第i次测量中cos环通道方向图的测量误差系数,e3i(θ)为第i次测量中sin环通道方向图的测量误差系数,θ为方位角,π为圆周率,等式右侧部分即为某次测量中两环通道方向图的测量误差。
17、而且,所述步骤3中由真实畸变方向图生成雷达的接收回波信号,具体计算方式为:
18、x(t)=ar(θ0)s(t)+n(t) (5)
19、式中,x(t)=[xc(t),xb(t),xa(t)]h,xc(t)、xb(t)、xa(t)分别为单极子c、环b、环a通道接收到的回波信号,θ0为信号的真实入射方位,ar(θ0)为利用步骤1得到的θ0方位上的真实畸变方向图表达式,s(t)为θ0方位的单到达角入射信号,n(t)=[nc(t),nb(t),na(t)]h为各天线通道的噪声,[]h表示共轭转置运算。
20、计算雷达的接收回波信号x(t)的协方差矩阵为:
21、
22、式中,为协方差矩阵,x=[x(1),x(2),...x(j),...,x(l)]为天线阵列接收信号矩阵,x(j)=[xc(j),xb(j),xa(j)]h,j=1,2,...,l为采样时间序列号,t为采样时间间隔,对应时间为t=jt,l为回波信号的快拍数,[]h表示共轭转置运算。
23、对协方差矩阵进行特征值分解,得:
24、
25、式中,为最大特征值对应的特征矢量所张成的信号子空间,σs为最大特征值组成的对角矩阵,为小特征值对应的特征矢量所张成的噪声子空间,σn为小特征值组成的对角矩阵,[]h表示共轭转置运算,单信源条件下除最大特征值外的都是小特征值。
26、定义music谱的表达式为:
27、
28、式中,p表示music谱,adi(θ)表示第i次测量得到的实测天线方向图,θ为方位角,i为单位矩阵,为最大特征值对应的特征矢量所张成的信号子空间,[]h表示共轭转置运算。
29、搜索music谱中谱峰最大值,其对应的角度即为方位角估计值
30、
31、式中,adi(θ)为第i次测量得到的实测天线方向图(导向矢量),θ为方位角,i为单位矩阵,为最大特征值对应的特征矢量所张成的信号子空间,[]h表示共轭转置运算。
32、而且,所述步骤4中方位角估计误差即为测向误差,其计算方法为:
33、
34、式中,为步骤3求得的所述信号的方位角估计值,θ0为信号的真实入射方位。
35、本发明还提供一种单极子/交叉环天线方向图测量和测向误差估计系统,用于实现如上所述的一种单极子/交叉环天线方向图测量和测向误差估计方法。
36、而且,包括处理器和存储器,存储器用于存储程序指令,处理器用于调用存储器中的程序指令执行如上所述的一种单极子/交叉环天线方向图测量和测向误差估计方法。
37、或者,包括可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序执行时,实现如上所述的一种单极子/交叉环天线方向图测量和测向误差估计方法。
38、与现有技术相比,本发明具有如下优点:
39、1)相比已有的天线方向图测量方法,本发明进一步考虑了测量误差的影响,不需要对已有测量方法进行改动,即可得到测量误差的大小,操作便捷、不受方向图测量方法的影响。
40、2)相比基于单极子/交叉环天线实测方向图的方位角估计方法,本发明区分了实测方向图与真实畸变方向图的定义表达式,基于实测方向图及其测量误差估计方位角。
41、3)本发明构建了根据实测方向图估计测量误差、根据测量误差估计测向误差的整个流程,为提高雷达测向精度提供了新的思路。
- 还没有人留言评论。精彩留言会获得点赞!