基于时域拟合的结构光三维扫描方法、装置及介质
本发明涉及结构光三维扫描,尤其是基于时域拟合的结构光三维扫描方法、装置及介质。
背景技术:
1、结构光三维扫描技术是物体模型重建的重要技术。在结构光三维扫描技术中,投射条纹图案到被测物体表面,同时使用相机采集条纹图像,再根据条纹图像计算出各像素位置所对应的相位值,以此为基础结合标定的系统模型获得被测物体表面的三维点云数据,进而实现物体模型重建。其中,计算出各像素位置所对应的相位值是获取三维点云数据的重要环节。采用正弦模板结合相移算法获取投影仪坐标的方法具有算法简单、精度高和抗干扰能力强等优点,因此得到了广泛的应用。但是,由于数字投影仪投射正弦条纹模板的速度较低,因而此方法仅仅适用于对三维扫描测量速度要求较低的应用场景。
2、为了实现高速三维扫描测量,近年来出现基于二值离焦技术的高速三维扫描技术研究,通过充分利用数字投影仪对二值模板的高速投射能力,同时使用图案离焦方法使二值图案成为近似正弦条纹图案,并以此快速获得三维扫描点云。然而,这种方法只能在特定离焦距离处形成较为较为理想的正弦条纹图案,当离焦距离由理想位置向前或者向后变化时,二值离焦所形成的图案是包含谐波的非理想正弦条纹图案,基于此二值离焦所形成的图案进行相位计算时将会导致相位误差的产生。相关技术针对此问题提出了通过脉宽调制方法来形成更加接近于正弦图案的二值图案,或者通过投射多光条图案结合格雷码模板来实现高速的三维扫描,同时提高测量深度范围。然而,相关技术仍旧通过形成近似正弦图案来计算相位,其对离焦距离较为敏感,只能通过损失一部分测量精度的方式获得高速三维扫描的能力。而且,相关技术是在图像空间通过拟合高斯条纹获取光条中心位置,即通过各光条(拥有数字微镜列坐标整数值)得到图像坐标精确值(横坐标和纵坐标均带小数位),在进行复杂表面测量时,相关技术得到的高斯条纹会产生变形,难以准确确定高斯条纹中心值,而使得计算结果出现误差,进而导致测量精度难以保证。
3、由此可见,如何在实现高速、大景深三维测量的同时对形状复杂表面进行高精度测量成为了亟待解决的技术问题。
技术实现思路
1、本发明的目的在于至少一定程度上解决现有技术中存在的技术问题之一。
2、为此,本发明的目的在于提供基于时域拟合的结构光三维扫描方法、装置及介质。
3、为了达到上述技术目的,本发明实施例所采取的技术方案包括:
4、一方面,本发明实施例提供了基于时域拟合的结构光三维扫描方法,包括以下步骤:
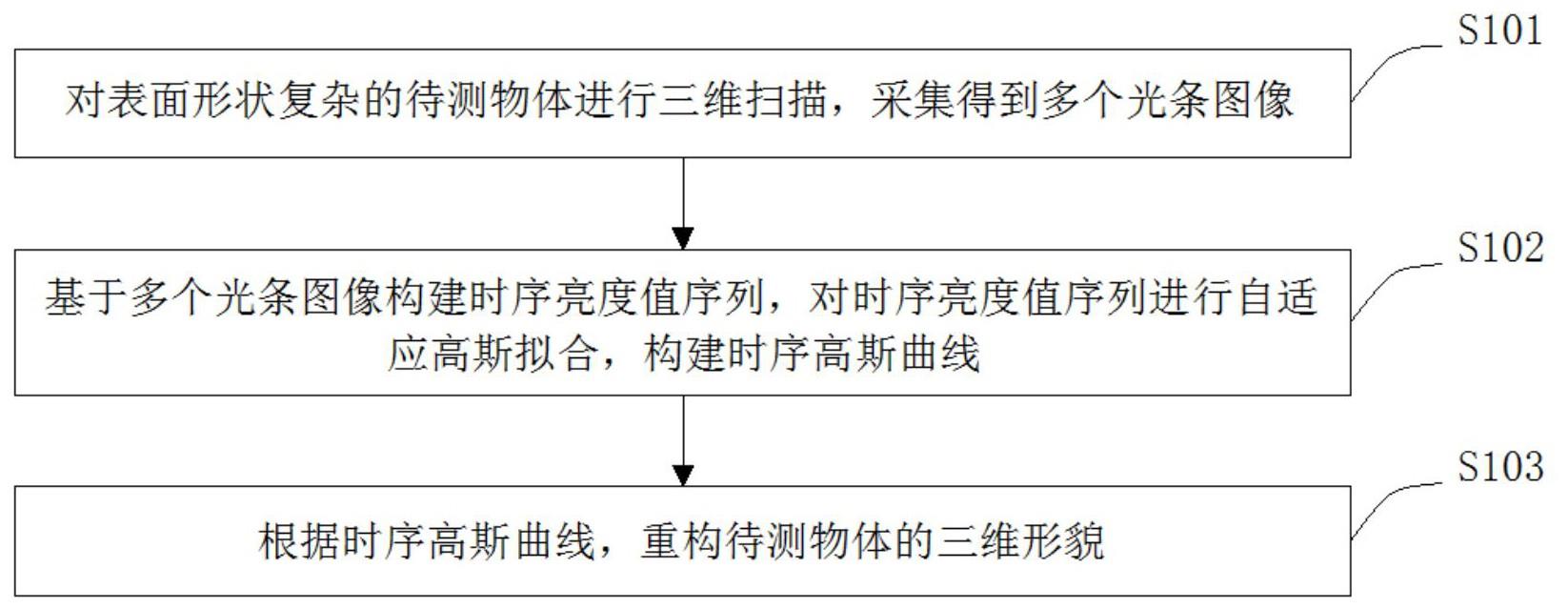
5、对表面形状复杂的待测物体进行三维扫描,采集得到多个光条图像;
6、基于多个所述光条图像构建时序亮度值序列,对所述时序亮度值序列进行自适应高斯拟合,构建时序高斯曲线;
7、根据所述时序高斯曲线,重构所述待测物体的三维形貌。
8、另外,根据本发明上述实施例的基于时域拟合的结构光三维扫描方法,还可以具有以下附加的技术特征:
9、进一步地,在本发明的一个实施例中,所述对表面形状复杂的待测物体进行三维扫描,采集得到多个光条图像,包括:
10、利用数字微镜投影仪依次投影多个光条模板至所述待测物体的复杂表面,通过ccd采集由所述待测物体的复杂表面反射的多个光条图像。
11、进一步地,在本发明的一个实施例中,多个所述光条图像与多个所述光条模板一一对应,每个所述光条模板中均包含多个等距的光条,多个所述光条与所述投影仪的多列微镜一一对应。
12、进一步地,在本发明的一个实施例中,所述基于多个所述光条图像构建时序亮度值序列,对所述时序亮度值序列进行自适应高斯拟合,构建时序高斯曲线,包括:
13、获取多个所述光条图像,每个所述光条图像的像素尺寸相同;
14、确定任一所述光条图像中的多个像素点,对于每个像素点均执行一次如下步骤:
15、依次提取当前像素点在每个光条图像的亮度值,得到当前像素点的时序亮度值序列,所述时序亮度值序列包括多个亮度值,并对当前像素点的时序亮度值序列进行自适应高斯拟合,构建当前像素点的时序高斯曲线;
16、当任一所述光条图像中的多个像素点均执行完如上步骤时,得到多个像素点的时序高斯曲线,所述时序高斯曲线的纵坐标表示为亮度值,其横坐标表示投影仪方位坐标。
17、进一步地,在本发明的一个实施例中,所述对当前像素点的时序亮度值序列进行自适应高斯拟合,构建当前像素点的时序高斯曲线,包括:
18、找寻当前像素点的时序亮度值序列中的最大亮度值,确定所述最大亮度值所在的横坐标位置;
19、以所述最大亮度值所在的横坐标位置作为当前像素点的时序高斯曲线的实际中心点的估计值,计算所述实际中心点的估计值与当前像素点的时序亮度值序列的序列中间点之间的偏差值并将其记作移位偏差值;
20、根据所述移位偏差值,对当前像素点的时序亮度值序列进行移位,得到移位后的当前像素点的时序亮度值序列;
21、对移位后的当前像素点的时序亮度值序列进行高斯拟合,得到当前像素点的时序高斯曲线。
22、进一步地,在本发明的一个实施例中,所述根据所述移位偏差值,对当前像素点的时序亮度值序列进行移位包括:
23、以所述移位偏差值的绝对值作为第一位移值;
24、当所述移位偏差值小于零时,将当前像素点的时序亮度值序列向右移动第一位移值;
25、当所述移位偏差值大于零时,将当前像素点的时序亮度值序列向左移动第一位移值;
26、当所述移位偏差值等于零时,当前像素点的时序亮度值序列不移动。
27、进一步地,在本发明的一个实施例中,在得到当前像素点的时序高斯曲线之后,还包括:
28、根据所述移位偏差值,修正所述时序高斯曲线的中心点。
29、进一步地,在本发明的一个实施例中,所述根据所述时序高斯曲线,重构所述待测物体的三维形貌,包括:
30、以每个像素点的修正后的时序高斯曲线的中心点的横坐标值作为每个像素点对应的投影仪方位坐标;
31、利用多个像素点对应的投影仪方位坐标,构建待测物体的未展开分布图;
32、对所述未展开分布图进行处理,得到待测物体的连续分布图,并基于所述连续分布图重构所述待测物体的三维形貌;
33、其中,所述未展开分布图的单个周期的幅值波动范围为,为光条模板的数量。
34、另一方面,本发明实施例提供了基于时域拟合的结构光三维扫描装置,包括:
35、图像采集模块,用于对表面形状复杂的待测物体进行三维扫描,采集得到多个光条图像;
36、数据处理模块,用于基于多个所述光条图像构建时序亮度值序列,对所述时序亮度值序列进行自适应高斯拟合,构建时序高斯曲线;
37、三维重构模块,用于根据所述时序高斯曲线,重构所述待测物体的三维形貌。
38、又一方面,本发明实施例提供了一种存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于实现上述的基于时域拟合的结构光三维扫描方法。
39、本发明的有益效果是:提供基于时域拟合的结构光三维扫描方法、装置及介质,利用数字投影仪的二值图案高速投射速率,实现高速三维扫描,降低离焦距离的敏感性的同时提高三维扫描的景深范围;另外,本发明在进行复杂曲面三维扫描时,时序亮度值序列所形成的的高斯曲线形状不会受表面形状影响而变形,有利于获得复杂曲面的三维点云精确数据,能够很好地克服相关技术在对复杂表面进行测量时高斯条纹变形而导致测量结果出现误差的问题,降低对复杂曲面的三维扫描的难度,并提高对复杂曲面的三维扫描的精度。
40、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!