本发明涉及一种火箭发动机高空模拟试验系统及方法,具体涉及一种发动机尾喷管位移视觉图像测量系统及方法。
背景技术:
1、某型大推力液氧煤油发动机是在原开式发动机基础上加大尾喷管面积比,适应低入口压力起动,用于火箭的二级发动机。由于二级发动机为高空发动机,常规地面试车状态难以模拟该型发动机的真实工作状态,导致发动机地面试车不能准确反映发动机真实性能,故需开展大推力发动机高空模拟试验,从而考核发动机的性能参数,满足发动机研制要求。火箭发动机高空模拟试验是指在地面试验设备中创造一个近似高空的环境,使发动机在这个环境里工作,进行其性能、可靠性及工作寿命等各种试验。
2、为了获得火箭发动机高空模拟试验的高比冲,在高空工作的发动机尾喷管通常采用大扩张比。这种发动机如果在地面试车台上试车,其燃气在尾喷管出口内一段距离上发生分离,尾喷管达不到满流,因此试车中测量的性能参数值不仅不能代表发动机在高空或空间工作的性能,而且燃气分离产生的振荡力可能破坏尾喷管,使发动机不能正常工作。因此,目前发动机高空模拟试验,首先是模拟环境压力(真空度)试验。
3、现有发动机-扩压器系统是在发动机的尾喷管上套接一个超音速扩压器,扩压器的一端与尾喷管相接,另一端与大气相通。发动机点火工作后,在扩压器入口处,尾喷管的高速燃气具有引射作用,使试验中尾喷管出口处产生并维持低于大气压的低压(真空)环境。该系统是利用发动机排气自身的能量对发动机尾部尾喷管局部抽真空,以达到发动机高空模拟试车的目的,且能保证发动机排出的燃气在尾喷管内达到满流。
4、发动机高空模拟试验的布置如图1、图2所示,包括扩压器01、扩压器固定装置02、发动机03、发动机固定装置04和试车架05;扩压器01采用圆筒状空气泄入式扩压器作为发动机03发动机高空模拟试验主要装置,工作时,在扩压器01内部产生普朗特-迈耶尔膨胀流。发动机03的尾喷管06外径约为ф2200mm(含加强筋、不含泄液管嘴),考虑到扩压器01制造偏差,吊装时便于安装和间隙调节,以及试验过程中产生的振动等,取扩压器01直径为ф2400mm,便于尾喷管06与扩压器01的插入对接。对于选定的扩压器01直径,尾喷管06与扩压器01内壁的间隙是一定的。空气泄入间隙的大小直接影响空气进入扩压器01中的流量,因而影响尾喷管06出口的环境压力。为了保证尾喷管06出口环境压力,必须有合适的空气泄入间隙。为解决此问题,在扩压器01进口设计间隙可调装置,以减小空气泄入量,保证尾喷管06内满流。
5、某试验区中试车台采用45°试验工位,其发动机03采用机架与试车台推力架安装固定后,由于发动机03自身的重力作用,存在尾喷管06轴线与安装轴线偏差,在发动机03点火起动瞬间,尾喷管06会存在上翘的现象。并且由于在起动过程中燃烧不稳定,尾喷管06还存在摆动的现象。如果处理不当,在发动机高空模拟试验时将会导致尾喷管06由于上翘或摆动挤压扩压器01内壁,造成尾喷管06损坏或破裂。因此在发动机高空模拟试验前必须进行短时间发动机03地面试验,监测起动过程中尾喷管06的各方向的偏移量。
6、现有的偏移量测量方法有拉线式位移传感器和激光位移传感器两种,但以往的试车中均存在问题,无法准确获得偏移量参数。拉线式位移传感器为滑线变阻器模式,且只能安装在尾喷管06边缘部位,在起动过程中,由于高温和振动,导致拉线式位移传感器内部电阻阻值变化产生零漂。采用激光传感器同样受制于试车环境,在起动瞬间,尾喷管06产生的红外光与激光传感器的测量光谱相叠加,导致数据异常。而且在上述传感器安装部位以外,无法对发动机03其余部位进行全方位的位移量的数据采集和分析。
7、综上所述,目前传统的偏移量测量方法,难以对发动机03进行全方位位移量的数据采集和分析。
技术实现思路
1、本发明的目的是针对传统的偏移量测量方法,难以对发动机进行全方位位移量的数据采集和分析的技术问题,而提供一种发动机尾喷管位移视觉图像测量系统及方法。
2、为解决上述技术问题,本发明所采用的技术方案为:
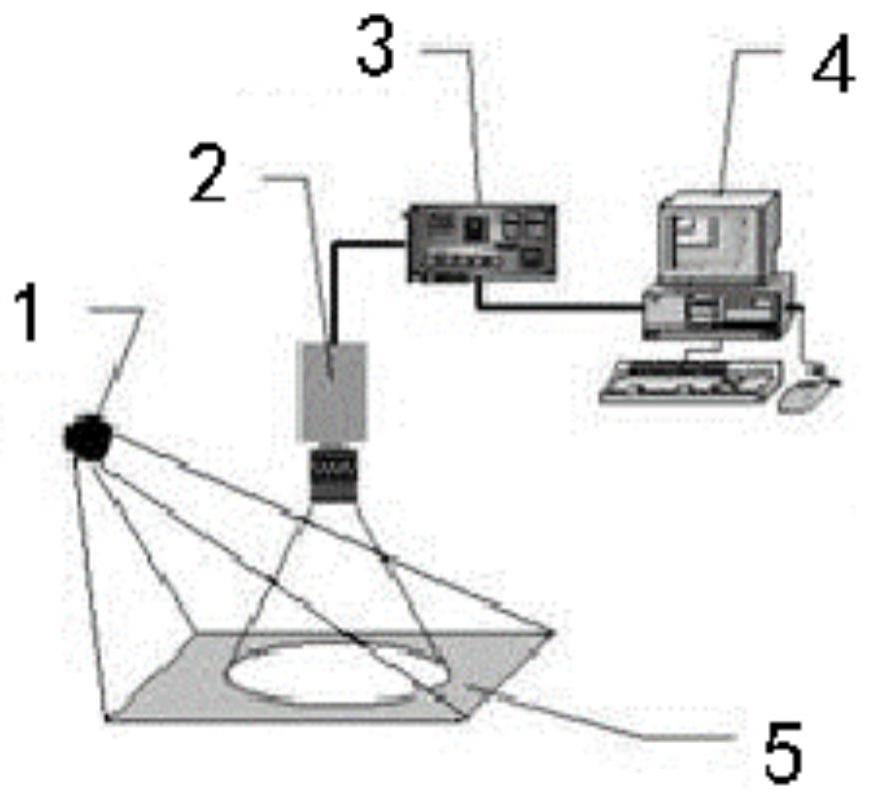
3、一种发动机尾喷管位移视觉图像测量系统,其特殊之处在于:包括光源、靶标、图像采集单元、与图像采集单元连接的数据分析与处理单元;
4、光源用于对待测量尾喷管进行照明;
5、靶标设置于待测量尾喷管上,且至少为5个;
6、图像采集单元包括两个高速相机两个高速相机内均设有图像采集卡,图像采集卡与数据分析与处理单元连接;高速相机与靶标相对设置,用于采集待测量尾喷管上靶标反射的光信号,并将光信号转换为模拟电信号;图像采集卡用于将模拟电信号转换为数字信号,并传递给数据分析与处理单元;
7、数据分析与处理单元用于对数字信号进行分析、处理,获得特征信息和测量结果。
8、进一步地,所述高速相机的拍摄速度为1000fps,快门速度为1/20000sec,图像分辨率为2560×2016,镜头焦距为50mm;
9、靶标采用玻璃微珠反光靶标,其目数为400;反光值为560;
10、光源的功率为100w,且无频闪。
11、进一步地,所述靶标为圆形,外直径为50mm,内直径为40mm,厚度为0.1mm,数量为9个。
12、同时,本发明还提供了一种发动机尾喷管位移视觉图像测量方法,其特殊之处在于,包括以下步骤:
13、1)搭建上述发动机尾喷管位移视觉图像测量系统;
14、2)标定高速相机的内参和外参;内参包括焦距、畸变系数与像元尺寸;外参包括两个高速相机之间的旋转矩阵、平移矩阵、基线距离;
15、3)在待测量尾喷管上粘贴多个靶标,并在基准点上设置基准靶标;多个靶标和基准靶标均用于测量待测量尾喷管的位移;
16、4)打开光源,利用两个高速相机同时采集点火过程中多个靶标和基准靶标的图像,获得多组尾喷管位移视觉图像;
17、5)对采集到的多组尾喷管位移视觉图像进行双目立体重建;
18、5.1、利用畸变系数对多组尾喷管位移视觉图像进行畸变校正;
19、5.2、利用旋转矩阵、平移矩阵对畸变校正后的所有尾喷管位移视觉图像进行立体校正;
20、5.3、将立体校正后的所有尾喷管位移视觉图像中两个高速相机每次拍摄的两张靶标图像进行立体匹配,获得视差图;
21、5.4、根据视差图、焦距、像元尺寸与基线距离,对视差图进行三维重建,获得多个靶标的三维坐标和基准靶标的三维坐标;
22、6)根据多个靶标的三维坐标和基准靶标的三维坐标,计算发动机尾喷管位移。
23、进一步地,步骤5.2)具体为:
24、利用旋转矩阵、平移矩阵使两个高速相机的光轴平行,且两个高速相机每次采集的靶标图像的对极线在同一水平线上、成像原点坐标一致和成像平面共面。
25、进一步地,步骤5.3)具体为:
26、通过对能量函数最小化将立体校正后的所有尾喷管位移视觉图像中两个高速相机每次拍摄的两张靶标图像进行立体匹配,获得视差图。
27、进一步地,步骤2)中,像元尺寸包括单个像元的宽dx、单个像元的高dy、图像中心点的x轴坐标u0,图像中心点的y轴坐标v0,图像宽u,图像高v;
28、步骤5.4具体为:
29、根据视差图d、焦距f与基线距离b,通过下式计算得到所有尾喷管位移视觉图像中每个像素点的z轴坐标值:
30、z=f*b/d;
31、由步骤2)得到的焦距f、单个像元的宽dx、单个像元的高dy、图像中心点的x轴坐标u0,图像中心点的y轴坐标v0,对图像上的每个像素点(u,v),通过下式计算所有尾喷管位移视觉图像中每个像素点的空间x轴坐标值与y轴坐标值:
32、x=(u-u0)*z*dx/f
33、y=(v-v0)*z*dy/f
34、因此,可获得所有尾喷管位移视觉图像中每个像素点的三维坐标(x,y,z),即9个圆形靶标圆心的三维坐标以及1个基准靶标圆心的三维坐标。
35、进一步地,步骤6)具体为:
36、6.1、利用多个靶标圆心的三维坐标分别减去1个基准靶标圆心的三维坐标,得到多个靶标圆心相对于1个基准靶标圆心的三维坐标;
37、6.2、根据多个靶标圆心相对于1个基准靶标圆心的三维坐标,计算得到发动机尾喷管点火时发生的位移。
38、进一步地,步骤6.1中,的多个靶标为9个。
39、与现有技术相比,本发明技术方案的有益效果是:
40、(1)本发明发动机尾喷管位移视觉图像测量系统,使得测量设备可以远离发动机工作的恶劣环境,实现了发动机全方位位移量的数据采集和分析。
41、(2)本发明发动机尾喷管位移视觉图像测量方法,解决了以往常规拉线式和激光式位移测量方法,在发动机地面试车过程中位移参数无法准确获取的问题。