多传感器的空间基准标定方法及装置
本发明涉及定位分析,尤其涉及一种多传感器的空间基准标定方法及装置。
背景技术:
1、随着自动驾驶、智能机器人等技术的不断发展,对于复杂场景下的高精度定位需求日益增加。然而,现有的定位技术在gnss(global navigation satellite system,全球导航卫星系统)信号遮挡、阴影、眩光等复杂环境下的定位精度和鲁棒性存在巨大挑战。为了解决这些问题,多传感器融合技术逐渐成为研究热点。通过结合多个传感器,如gnss、imu(inertial measurement unit,惯性测量单元)和相机等获取的数据,并利用各种融合算法进行处理,可以提高定位结果的准确性和鲁棒性。
2、但是,现有的多传感器融合定位技术仍然存在一些挑战,如各传感器之间的空间基准标定;阴影、眩光等复杂环境下定位精度的保证与维持等问题。采用多传感器融合进行导航定位时,gnss、imu和相机等传感器具有独立的时钟源和坐标系统,且各传感器之间存在采样频率和采集时间的差异。为实现多传感器数据的有效融合,在进行导航解算时,需要在多传感器高度集成的基础上同时采用一定的技术手段将各传感器的多源数据统一于同空间基准下,保证各传感器数据同步,从而才能更有效的、更准确的实现复杂场景下的高精度定姿与定位。因此,各传感器之间的高精度空间基准标定非常重要,多传感器空间基准标定是多源融合高精度定位定姿的基础。在复杂定位环境多传感器空间基准统一方面,不同传感器之间很难精确安置,比如相机z轴和imu的y轴都指向前方,但是实际安装时,不能做到两者完全一致,因此需要对各传感器之间的旋转和平移参数进行精确标定,但常规的离线标定方法并不能很好的适应传感器参数和环境变化,使得多类不同传感器的空间基准不统一,难以有效进行传感器数据融合。
技术实现思路
1、本发明提供一种多传感器的空间基准标定方法及装置,用以解决现有技术中多传感器的空间基准不统一的缺陷,实现多传感器的空间基准高精度标定。
2、本发明提供一种多传感器的空间基准标定方法,包括:
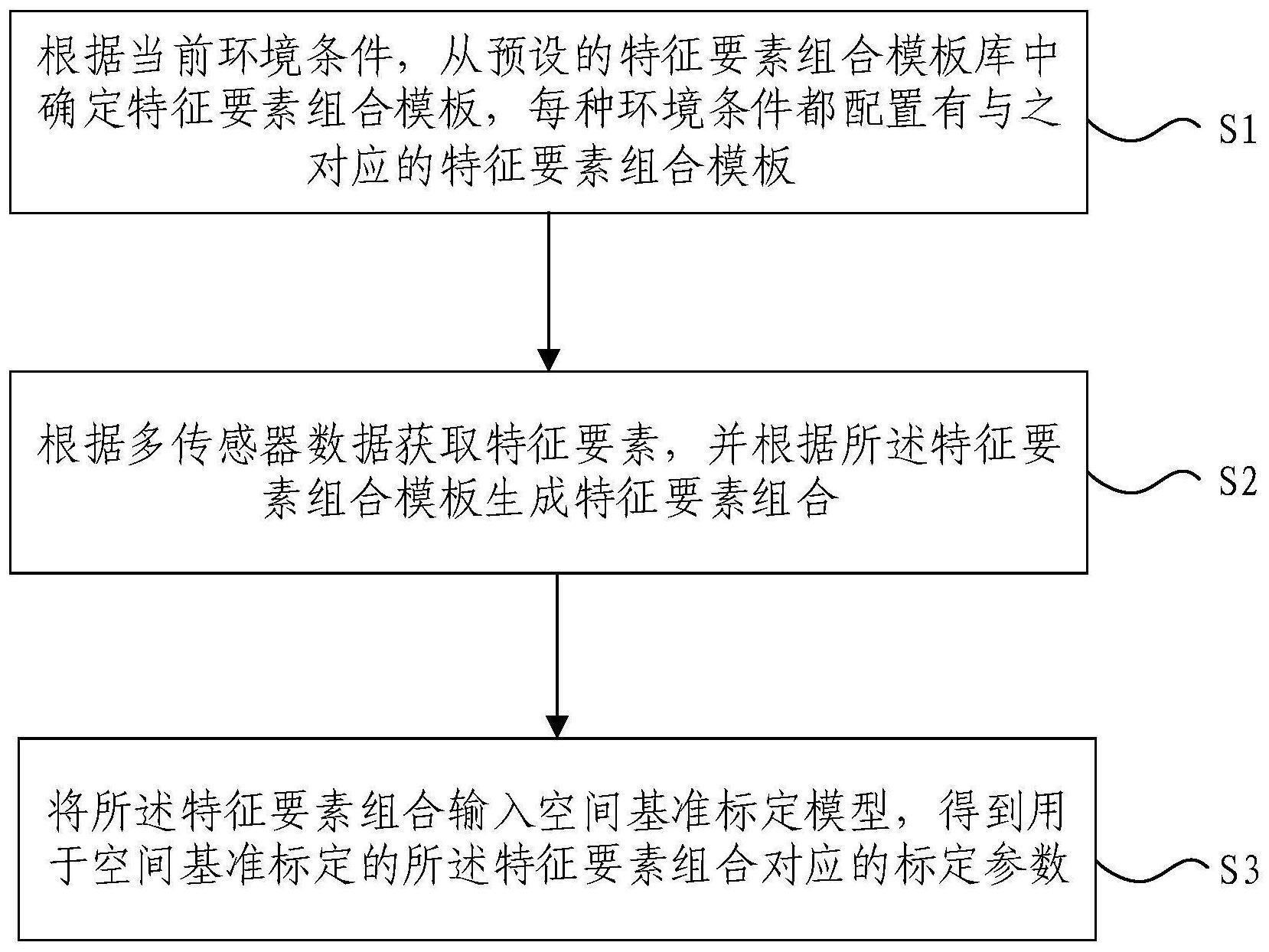
3、根据当前环境条件,从预设的特征要素组合模板库中确定特征要素组合模板,每种环境条件都配置有与之对应的特征要素组合模板;
4、根据多传感器数据获取特征要素,并根据所述特征要素组合模板生成特征要素组合;
5、将所述特征要素组合输入空间基准标定模型,得到用于空间基准标定的所述特征要素组合对应的标定参数;
6、其中,所述空间基准标定模型基于特征要素样本组合,以及所述特征要素样本组合对应的标定参数作为标签训练得到。
7、根据本发明提供的一种多传感器的空间基准标定方法,所述多传感器数据包括:gnss数据、imu数据和双目视觉数据,所述特征要素包括:特征点、特征线、语义特征和文字特征;
8、所述根据多传感器数据获取特征要素,包括:
9、以所述gnss数据和imu数据作为参考,从所述双目视觉数据中分别获取特征点、特征线、语义特征和文字特征。
10、根据本发明提供的一种多传感器的空间基准标定方法,所述特征点和特征线通过sift算法或surt算法获取,所述语义特征通过深度学习算法获取,所述文字特征通过光学字符识别获取。
11、根据本发明提供的一种多传感器的空间基准标定方法,所述空间基准标定模型的训练包括:
12、对多传感器样本数据进行数据清洗和去噪;
13、根据所述多传感器样本数据获取特征要素样本,并获取各所述特征要素样本对应的标定参数;
14、根据各所述特征要素样本对应的标定参数之间的差值确定不同环境条件下的特征要素样本组合,合并所述特征要素样本组合中各所述特征要素样本组合对应的标定参数,作为所述特征要素样本组合对应的标定参数;
15、基于所述特征要素样本组合,以及所述特征要素样本组合对应的标定参数作为标签,通过随机森林算法训练得到空间基准标定模型。
16、根据本发明提供的一种多传感器的空间基准标定方法,所述通过随机森林算法训练得到空间基准标定模型之后,还包括:
17、通过计算标定误差评估所述空间基准标定模型的性能。
18、根据本发明提供的一种多传感器的空间基准标定方法,所述通过计算标定误差评估所述空间基准标定模型的性能,包括:
19、将所述特征要素样本组合输入至所述空间基准标定模型,以得到测试标定参数;
20、将所述测试标定参数中各特征点在3d世界坐标系中的位置点投影到2d图像平面上,并计算各特征点的投影点与各特征点对应实际图像中检测到的位置点间的距离;
21、计算所有特征点的平均重投影误差评估所述测试标定参数的准确性,以评估所述空间基准标定模型的性能,计算公式为:
22、
23、其中,e表示平均重投影误差,n表示特征点的三维点和对应的二维点的数量,(x,y)表示二维点的坐标,(x′,y′)表示将三维点投影到2d图像平面上得到的对应点的坐标。
24、根据本发明提供的一种多传感器的空间基准标定方法,所述得到用于空间基准标定的所述特征要素组合对应的标定参数之后,还包括:
25、将所述特征要素组合和所述特征要素组合对应的标定参数作为样本加入到所述空间基准标定模型的样本集。
26、本发明还提供一种多传感器的空间基准标定装置,包括:
27、模板确定模块,根据当前环境条件,从预设的特征要素组合模板库中确定特征要素组合模板,每种环境条件都配置有与之对应的特征要素组合模板;
28、组合生成模块,根据多传感器数据获取特征要素,并根据所述特征要素组合模板生成特征要素组合;
29、组合输入模块,将所述特征要素组合输入空间基准标定模型,得到用于空间基准标定的所述特征要素组合对应的标定参数;
30、其中,所述空间基准标定模型基于特征要素样本组合,以及所述特征要素样本组合对应的标定参数作为标签训练得到。
31、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一项所述的多传感器的空间基准标定方法。
32、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述的多传感器的空间基准标定方法。
33、本发明提供的一种多传感器的空间基准标定方法及装置,通过当前环境条件首先确定特征要素组合模板,每种环境条件都配置有与之对应的特征要素组合模板,根据不同的环境条件选取对应的特征要素组合模板以得到准确的空间基准标定参数。然后从多传感器数据中获取特征要素,并根据特征要素组合模板生成所需的特征要素组合。最后将特征要素组合输入空间基准标定模型,得到用于空间基准标定的特征要素组合对应的标定参数,以解决多传感器的空间基准不统一的问题。其中,空间基准标定模型基于特征要素样本组合,以及特征要素样本组合对应的标定参数作为标签训练得到。通过空间基准标定模型能够实时计算出当前环境条件下的空间基准标定参数,实现多传感器的空间基准高精度在线标定,无需离线采集大量的标定数据,提高的空间基准标定的效率和实时性,为不同环境条件下的高精度定位提供良好的前提条件。
- 还没有人留言评论。精彩留言会获得点赞!