基于多雷达融合定位工程机械设备周围物体的方法和系统与流程
本发明涉及雷达探测和工程机械远程遥控,具体为基于多雷达融合定位工程机械设备周围物体的方法和系统。
背景技术:
1、传统的单一雷达定位系统因识别范围有限,应用在范围大或环境复杂的作业现场进行监测时往往存在较大的视觉盲区。故目前已有通过其他传感器配合雷达或利用多个雷达融合定位物体的方案。针对不同传感器的组合融合方案,如雷达和超声波传感器的融合方案,雷达和摄像头的融合方案等,由于其输出数据类型或反应的信息不同,融合过程较为复杂,且较难以统一的形式反馈给客户;针对多个雷达的融合方案,若是简单叠加雷达数量期达到充分覆盖的目的,会因难以避免的雷达探测区域的重合,存在测量误差和数据不一致性的问题,导致定位信息不准确,例如无法确定多个雷达观测的目标是否来自同一实体,缺乏数据关联性等。现有技术中,一些应用在无人机上的多雷达目标探测系统,在进行数据融合的过程中会对关联性做出相应的分析处理,但其处理方法较为复杂,对数据处理设备的数据处理能力要求也比较高。
技术实现思路
1、本发明在现有技术的基础上,提出了一种新的基于多雷达融合定位工程机械设备周围物体的方法和系统,改进了数据融合的过程,使之更简便快捷,且适用于工程机械设备对周围物体的定位。
2、为实现上述目的,本发明提供了以下技术方案:
3、基于多雷达融合定位工程机械设备周围物体的方法,其特征在于,包括以下步骤:
4、步骤s1:沿着工程机械设备的周向布置多个雷达传感器,每个雷达传感器对应一个单元扫描区域,调整各雷达传感器的安装位置和安装角度,使每个雷达传感器至少与一个相邻的雷达传感器的单元扫描区域相接,形成扫描范围扩大的连续扫描区域;
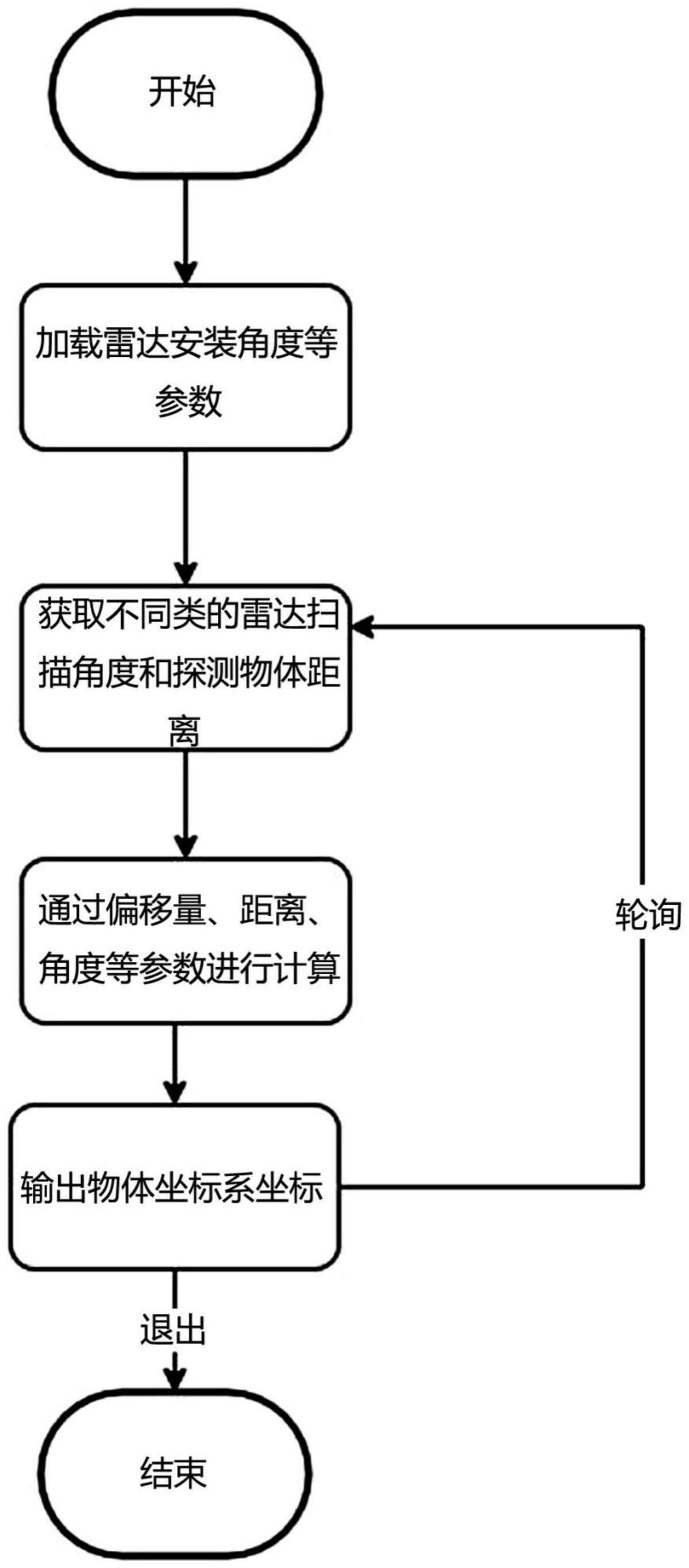
5、步骤s2:构建工程机械设备和各雷达传感器的本体坐标系,以工程机械设备的本体坐标系为目标坐标系,获得各雷达传感器在目标坐标系中的安装位置参数和安装角度参数;
6、步骤s3:在任一雷达传感器检测到物体时,获得该物体在当前雷达传感器本体坐标系中的定位参数,将其记为第一定位参数;
7、利用雷达传感器在目标坐标系中的安装位置参数和安装角度参数进行坐标转换,将所述第一定位参数变换到目标坐标系中,获得物体在目标坐标系中的定位参数,将其记为第二定位参数;
8、步骤s4:在每个扫描周期内,比对不同雷达传感器探测到的物体的第二定位参数,对于任一扫描周期内第二定位参数相等的物体,判定其为同一物体,完成数据间的关联,之后进入步骤s5或步骤s6;
9、步骤s5:在显示屏的相应界面中,基于被定位物体的第二定位参数,显示被定位物体和和所述工程机械设备在可视化坐标图或场景图中的位置;
10、步骤s6:将所述目标坐标系转换为极坐标系,将所述第二定位参数转换为极坐标系中的定位参数,基于转换后的极坐标系生成雷达图,在显示屏的相应界面中,基于转换后的定位参数显示被定位物体和所述工程机械设备在雷达图中的位置。
11、在上述方案的基础上,进一步改进或优选的方案还包括:
12、进一步的,所述目标坐标系和各雷达传感器的本体坐标系均为与水平面平行的二维坐标系,所述目标坐标系为直角坐标系,雷达传感器的本体坐标系为极坐标系或直角坐标系。
13、进一步的,所述雷达传感器的安装位置参数为雷达传感器安装点和目标坐标系原点的直线距离,所述雷达传感器本体坐标系原点或极点落在所述安装点上;
14、将雷达传感器安装点和目标坐标系原点的连线记为第一直线,所述雷达传感器的安装角度参数为所述第一直线相对于目标坐标系坐标轴的偏移角度;
15、所述第一定位参数,为物体的扫描距离和扫描角度,所述扫描距离为物体和相应的雷达传感器安装点的直线距离,将物体和相应的雷达传感器安装点的连线记为第二直线,所述扫描角度是指第二直线相对于第一直线的偏移角度;
16、所述第二定位参数,为物体在目标坐标系中的横坐标和纵坐标。
17、进一步的,步骤s3中,所述的坐标转换通过以下公式表达:
18、
19、上式中:
20、x和y为物体在目标坐标系中的横坐标和纵坐标;
21、o为雷达传感器的安装位置参数;
22、l为物体第一定位参数中的扫描距离;
23、α为以目标传感器的x轴为参照坐标轴时,雷达传感器的安装角度参数,依据预设的角度偏移正方向,取正值或负值;
24、ρ为物体第一定位参数中的扫描角度,依据预设的角度偏移正方向,取正值或负值。
25、进一步的,所述工程机械设备为移动设备,所述多个雷达传感器分布在工程机械设备的两侧和尾部。
26、进一步的,步骤s1包括:
27、对所述的多个雷达传感器赋予编号,按编号沿设备周向依次布设,并将首个雷达传感器布设在所工程机械设备的一侧,将最后一个雷达传感器布设在所述工程机械设备的另一侧,调整各雷达传感器的安装位置和安装角度时,使各雷达传感器与相邻的下一个雷达传感器的单元扫描区域相接。
28、基于多雷达融合定位工程机械设备周围物体的系统,用于实施如上所述的方法,其特征在于,包括控制器、显示设备以及多个雷达传感器;
29、所述的多个雷达传感器沿着工程机械设备的周向依次布置,每个雷达传感器对应一个单元扫描区域,每个雷达传感器至少与一个相邻的雷达传感器的单元扫描区域相接,形成扫描范围扩大的连续扫描区域;
30、所述控制器,用于构建工程机械设备和各雷达传感器的本体坐标系,并以工程机械设备的本体坐标系为目标坐标系,记录各雷达传感器在目标坐标系中的安装位置参数和安装角度参数;用于并读取各雷达传感器反馈的第一定位参数,并结合各雷达传感器的安装位置参数和安装角度参数进行坐标转换计算,获得物体在目标坐标系中的定位参数;用于在预设的任一扫描周期内,比对不同雷达传感器探测到的物体的第二定位参数,对于具有相同第二定位参数的物体,判定其为同一物体;
31、所述显示设备为用户图形界面的载体,其信号输入端与控制器的信号输出端,所述用户图形界面具有显示坐标图、雷达图或场景图的模块,在任一扫描周期内,基于被扫描到的物体的第二定位参数或与其对应的极坐标参数,显示物体和和工程机械设备在坐标图、雷达图或场景图中的位置。
32、进一步的,所述控制器设有将所述目标坐标系转换为极坐标系,将所述第二定位参数转换为极坐标系中的定位参数,并基于转换后的极坐标系生成雷达图的数据处理模块。
33、本发明的有益效果包括:
34、本发明基于多雷达融合定位工程机械设备周围物体的方法和系统,相比传统的单一雷达定位系统,可以有效的减少盲区和死角,提供更全面的物体感知能力,能够确定多个雷达观测的目标是否来自同一实体,能够有效的进行数据间的关联,使定位信息更加准确,并且计算过程简便快捷,这使得系统的实现和操作更加便利,对控制器的数据处理能力要求也相对较低,在提高工作效率和响应速度的同时,有效的控制实施成本。本发明方法和系统能够适应不同环境下,如矿山、港口等,绝大部分工程机械设备的物体探测需求,具有广泛的应用前景和经济效益,在提高工作安全性和效率方面具有重要的意义。
- 还没有人留言评论。精彩留言会获得点赞!