一种原子时间高空间带宽积的飞秒成像装置
本发明涉及超快光学成像。更具体地说,本发明涉及一种原子时间高空间带宽积的飞秒成像装置。
背景技术:
1、在现有的超快光学成像技术中,泵浦-探针(pump-probe)技术无疑是最经典、使用最广泛的一种成像技术。随着超短激光脉冲技术的发展,其时间分辨率已进入飞秒-阿秒时间尺度。然而,泵浦-探针技术仅适用于周期性、重复性发生的超快过程。发展适用于随机的、不可重复发生瞬态过程(如超快半导体材料的超快动力学过程等)的单次多幅成像技术一直是人们研究的热点,并取得了一些令人瞩目的成果。
2、目前,国内外具有代表性的原子时间单次多幅成像技术主要有全光时序分幅相机(stamp)、压缩超快摄影技术(cup)、频率编码识别摄影技术(frame)和非线性光参量放大成像(fincopa)等。
3、stamp利用超短脉冲整形和光谱-时间编码技术,单次曝光可获得6幅图像,像素分辨率为450×450pixels,摄影频率可达到4.4万亿幅每秒(tfps)。结合光谱滤波方案,sf-stamp的摄影频率提升至7.5tfps,画幅数增加到25,而时间分辨率则降至465fs。受到测不准关系的制约,sf-stamp技术的摄影频率和时间分辨率很难同时提高。
4、cup通过伪随机编码、条纹相机与cs算法,单次测量可获得摄影频率0.1tfps,时间分辨率10ps,空间分辨率0.78lp/mm,350幅图像。优化算法后,空间分辨率可提升至7lp/mm。结合显微放大,pcup空间分辨率达到几微米,t-cup摄影频率可提升到10tfps。然而,这种技术由于受到记录信息时空混叠的影响,空间分辨率难以提高,并且难以达到实际应用水平。
5、frame利用结构光编码,频域解码方案,单次可获得摄影频率5tfps,曝光时间200fs,空间分辨率15lp/mm,4幅图像,该技术频域分幅方法导致了画幅数和空间分辨率相互制约。
6、fincopa是一种基于非共线光参量放大的成像技术,单次曝光获得4幅,时序摄影频率15tfps,本征空间分辨率大于30lp/mm的高时空分辨图像。该技术优化其成像装置,亦是难以提高画幅数。
7、由此,目前的单次超快成像技术,还无法同时兼备高时间分辨、高空间带宽积、高摄影频率和多画幅,这是本领域亟待解决的问题。
技术实现思路
1、本技术实施例的目的是,提供一种原子时间高空间带宽积的飞秒成像装置,解决了如何实现同时兼备高时间分辨、高空间带宽积、高摄影频率和多画幅的单次超快成像技术的技术问题。本技术实施例主要通过下述技术方案实现:
2、本技术实施例提供了一种原子时间高空间带宽积的飞秒成像装置,包括:
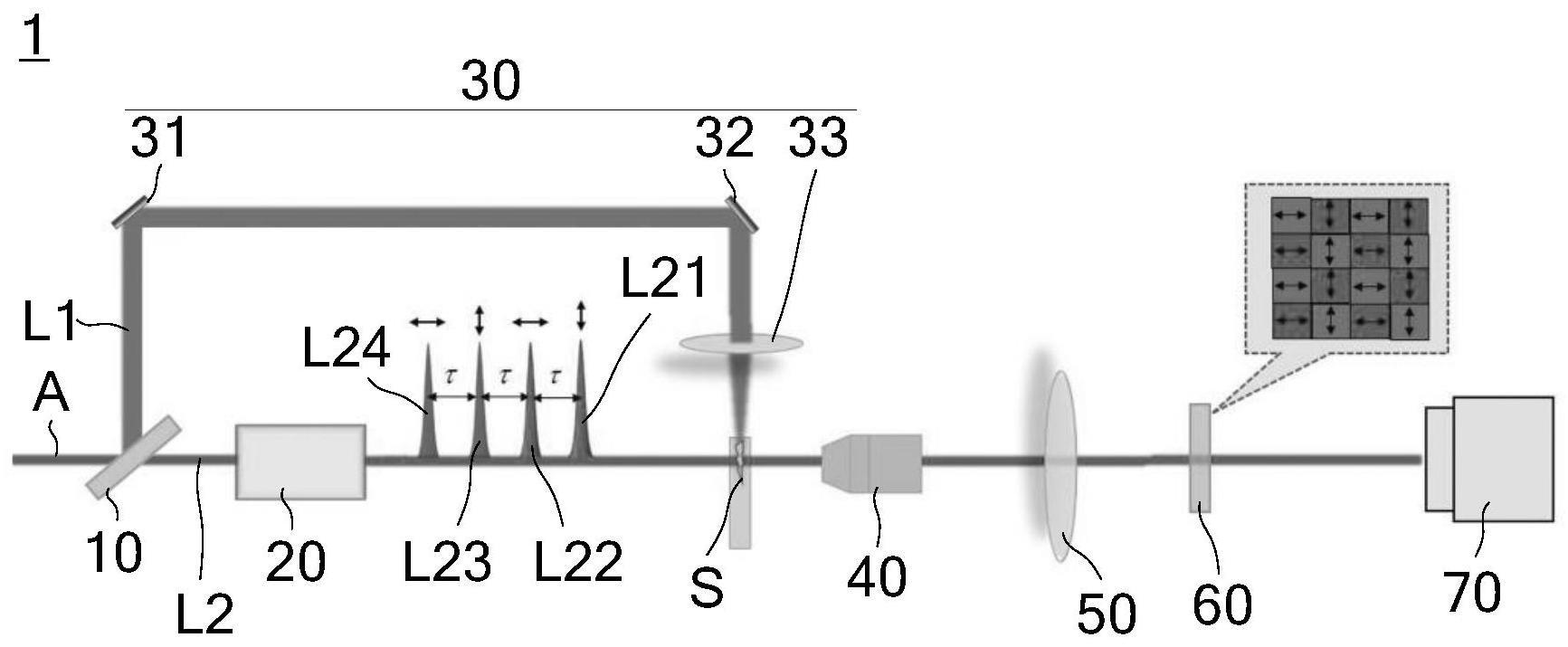
3、第一分束器、光谱-偏振编码系统、泵浦光路系统、显微物镜、第一透镜、光谱-偏振网格取样掩膜和ccd(charge coupled device,电荷耦合器件)摄像机;其中,
4、入射光入射所述第一分束器后,被所述第一分束器分成泵浦光和探测光;
5、所述泵浦光入射所述泵浦光路系统,并照射至样品上;
6、所述探测光入射所述光谱-偏振编码系统后形成第一时序子脉冲、第二时序子脉冲、第三时序子脉冲和第四时序子脉冲,所述第一时序子脉冲、所述第二时序子脉冲、所述第三时序子脉冲和所述第四时序子脉冲在所述泵浦光照射所述样品后照射到所述样品上;
7、所述第一时序子脉冲、所述第二时序子脉冲、所述第三时序子脉冲和所述第四时序子脉冲在照射所述样品后,均依次入射所述显微物镜、所述第一透镜、所述光谱-偏振网格取样掩膜和所述ccd摄像机,所述第一时序子脉冲在所述ccd摄像机上形成第一图像,所述第二时序子脉冲在所述ccd摄像机上形成第二图像,所述第三时序子脉冲在所述ccd摄像机上形成第三图像,所述第四时序子脉冲在所述ccd摄像机上形成第四图像,所述第一图像、所述第二图像、所述第三图像和所述第四图像依时序生成,用以重建超快场景;
8、所述第一时序子脉冲和所述第二时序子脉冲之间的延迟时间为40fs(毫微微秒),所述第二时序子脉冲和所述第三时序子脉冲之间的延迟时间为40fs,所述第三时序子脉冲和所述第四时序子脉冲之间的延迟时间为40fs。
9、在一些技术方案中,所述光谱-偏振编码系统包括倍频晶体、第二分束器、第一反射镜、第一偏振片、第一时间延迟器、合束器、第二偏振片、第二时间延迟器和第二反射镜,其中,
10、所述探测光入射所述倍频晶体后形成倍频光和基频光,所述倍频光和所述基频光入射所述第二分束器分成第一子倍频光、第二子倍频光、第一子基频光和第二子基频光,所述第一子倍频光和所述第二子倍频光的光强度相同,所述第一子基频光和第二子基频光的光强度相同;
11、所述第一子倍频光依次入射所述第一反射镜、所述第一偏振片和所述第一时间延迟器,形成所述第一时序子脉冲;
12、所述第一子基频光依次入射所述第一反射镜、所述第一偏振片和所述第一时间延迟器,形成所述第二时序子脉冲;
13、所述第二子倍频光依次入射所述第二偏振片、所述第二时间延迟器和所述第二反射镜,形成所述第三时序子脉冲;
14、所述第二子基频光依次入射所述第二偏振片、所述第二时间延迟器和所述第二反射镜,形成所述第四时序子脉冲;
15、所述第一时序子脉冲、所述第二时序子脉冲、所述第三时序子脉冲和所述第四时序子脉冲均入射至所述合束器,合束后照射至所述样品上。
16、在一些技术方案中,所述泵浦光路系统包括第三反射镜、第四反射镜和第二透镜,所述泵浦光入射所述第三反射镜,经所述第三反射镜反射至所述第四反射镜,所述第四反射镜将所述泵浦光反射至所述第二透镜,所述第二透镜将所述泵浦光聚焦照射至所述样品上。
17、在一些技术方案中,所述第一时序子脉冲、所述第二时序子脉冲、所述第三时序子脉冲和所述第四时序子脉冲合束后的光束,与经过所述第二透镜的所述泵浦光是相互垂直的。
18、在一些技术方案中,所述原子时间高空间带宽积的飞秒成像装置还包括飞秒激光脉冲放大器,所述飞秒激光脉冲放大器用于出射所述入射光。
19、在一些技术方案中,所述原子时间高空间带宽积的飞秒成像装置的成像过程表示为:
20、
21、其中,rn(x,y)的含义为超快场景中不同时刻的网格图像,n为不同时刻,s(x,y)为光谱-偏振网格取样掩膜,o(x,y,t-nτ)为不同时刻的样品所对应的场景(也即在所述ccd摄像机所形成的图像),pn(x,y)是偏振编码,wn(x,y)是光谱编码,in(x,y,t-nτ)是t时刻的飞秒子脉冲。
22、在一些技术方案中,所述原子时间高空间带宽积的飞秒成像装置重建超快场景为:
23、o(x,y,ti)=f-1(h[f(ri(x,y)])i=1,2,3,4;
24、其中,f为傅里叶变换算符,h为频域滤波算子。
25、在一些技术方案中,所述光谱-偏振网格取样掩膜的像元尺寸为10um*10um,相邻像元之间的距离为10um。
26、在一些技术方案中,所述第一偏振片的偏振方向与所述第二偏振片的偏振方向相互垂直。
27、本技术实施例的有益效果包括:
28、本技术实施例提供的原子时间高空间带宽积的飞秒成像装置包括第一分束器、光谱-偏振编码系统、泵浦光路系统、显微物镜、第一透镜、光谱-偏振网格取样掩膜和ccd摄像机;入射光入射第一分束器后,被分成泵浦光和探测光,泵浦光入射泵浦光路系统后照射至样品上,产生超快过程;探测光入射光谱-偏振编码系统后形成第一时序子脉冲、第二时序子脉冲、第三时序子脉冲和第四时序子脉冲,并在泵浦光照射样品后照射到样品上,以照明样品中的超快场景;第一时序子脉冲、第二时序子脉冲、第三时序子脉冲和第四时序子脉冲在照射样品后,均依次入射显微物镜、第一透镜、光谱-偏振网格取样掩膜和ccd摄像机,ccd摄像机用以记录每个时序子脉冲对应的超快场景信息,每个时序子脉冲在ccd摄像机上形成对应的图像。由于本技术实施例采用了光谱-偏振编码系统和光谱-偏振网格取样掩膜,由此,本技术实施例能够利用网格成像原理,以波长/偏振换时间、时间换空间的成像理念,实现同时兼备高时间分辨、高空间带宽积、高摄影频率和多画幅的单次超快成像技术。
29、除非另有定义,否则,本文中使用的所有技术和科学术语与本技术实施例所属领域的普通技术人员的通常理解具有相同的含义。
30、在上述各方面中所提及的关于本技术实施例的各种特征和实施方式,视情况而定,在适当变通的情况下可以应用于其他方面。因此,一个方面中的具体特征可以与其他方面中的具体特征适当地进行组合。
31、本技术实施例的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本技术实施例的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!