一种智能测距装置、线缆燃烧结果的测量方法及装置与流程
本技术涉及燃烧测试的,尤其涉及一种智能测距装置、线缆燃烧结果的测量方法及装置。
背景技术:
1、近年来,随着城市化进程的加快,线缆的铺设力度大大增加,可以说人们生活环境中都有线缆的存在,那么其安全性是一个非常重要的问题,其中就包含了线缆的阻燃性能。这一性能的考核主要通过线缆的垂直燃烧试验来完成,现在主要的测试手段是燃烧由垂直燃烧试验机完成,最终数据的读取和结果判定需由人工读取分析完成。然而该方法读取不方便,且需要测试人员打开箱门,使得测试人员与燃烧气体进行接触,该燃烧气体对于人体有害。
技术实现思路
1、本技术实施例提供了一种智能测距装置、线缆燃烧结果的测量方法及装置,可以在测试人员避免接触燃烧气体的同时能够快速准确度确定燃烧结果。
2、第一方面,本技术实施例提供了一种智能测距装置,用于测量线缆垂直燃烧长度,所述智能测距装置包括支架、测量组件、第一驱动组件、第二驱动组件和控制系统;
3、所述测量组件可沿线缆的长度方向移动地安装于所述支架,所述测量组件用于测量燃烧后的所述线缆;
4、所述第一驱动组件驱动连接所述支架以驱动所述支架靠近或远离所述线缆;
5、所述第二驱动组件驱动连接所述支架以驱动所述测量组件在所述支架上滑动;
6、所述控制系统分别与所述第一驱动组件和所述第二驱动组件信号连接。
7、一种可能的实现方式中,所述智能测距装置还包括轨道,轨道沿设定方向延伸,所述支架可沿设定方向移动地与所述轨道配合。
8、一种可能的实现方式中,所述测量组件包括移动侧抓和两个夹片,所述夹片固定在所述移动侧抓上,所述移动侧抓可沿线缆的长度方向移动地安装于所述支架,所述两个夹片之间的距离小于所述线缆未燃烧的直径且大于所述线缆的线芯的直径。
9、一种可能的实现方式中,所述测量组件还包括位移传感器,所述位移传感器用于采集所述测量组件的移动数据。
10、一种可能的实现方式中,所述智能测距装置还包括参考侧抓,所述参考侧抓固定在所述支架远离所述轨道的一端。
11、第二方面,本技术实施例提供了一种线缆燃烧结果的测量方法,包括:
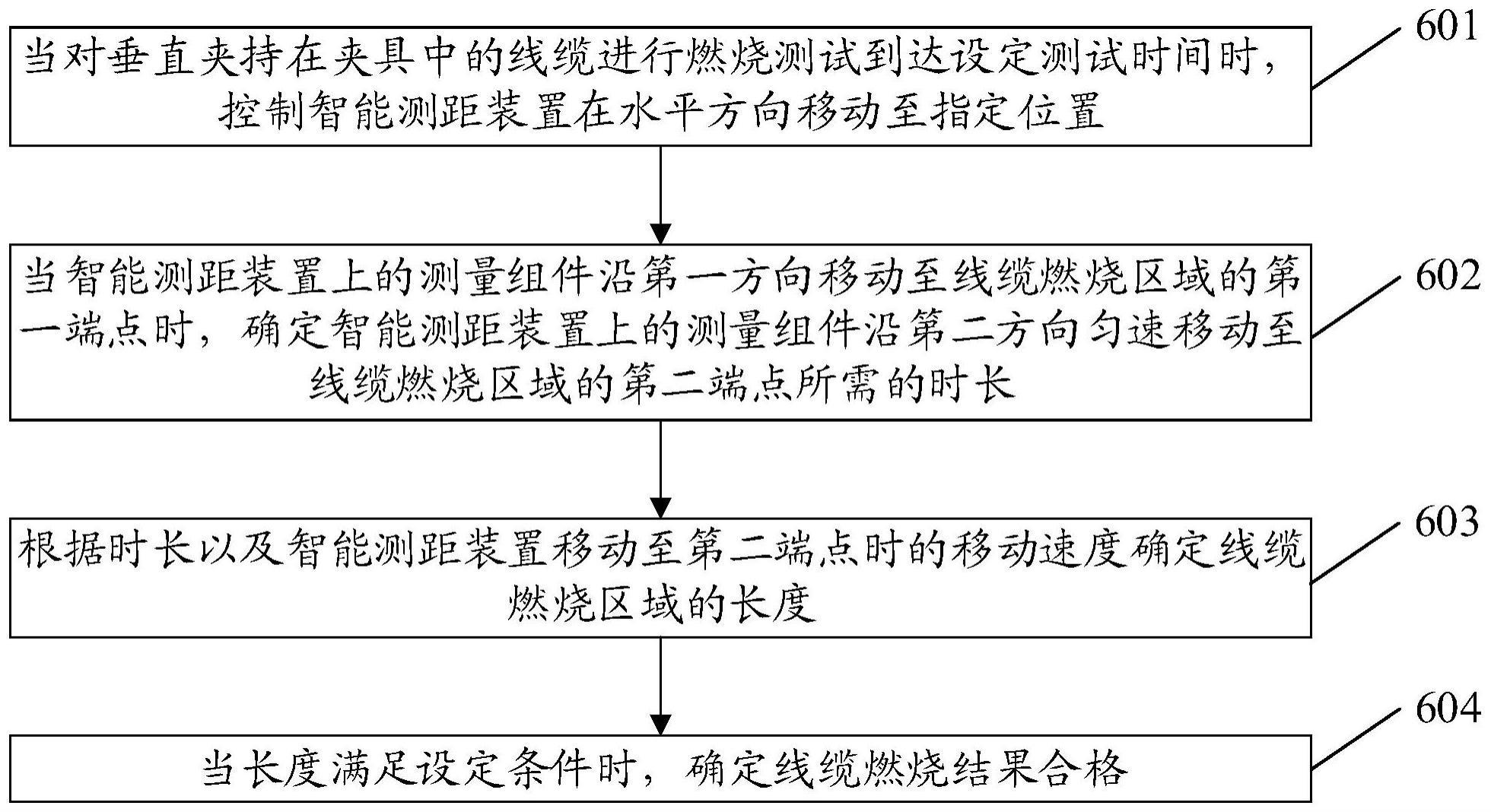
12、当对垂直夹持在夹具中的线缆进行燃烧测试到达设定测试时间时,通过控制系统控制第一驱动组件将支架在水平方向移动至指定位置;
13、当通过所述控制系统控制第二驱动组件将测量组件沿第一方向移动至线缆燃烧区域的第一端点时,通过所述控制系统控制所述第二驱动组件将测量组件沿第二方向匀速移动至线缆燃烧区域的第二端点,并确定所述测量组件沿第二方向匀速移动至线缆燃烧区域的第二端点所需的时长,所述第二方向为所述第一方向的反方向;
14、根据所述时长以及所述测量组件移动至第二端点时的移动速度确定所述线缆燃烧区域的长度;
15、当所述长度满足设定条件时,确定所述线缆燃烧结果合格。
16、一种可能的实现方式中,所述测量组件包括的夹片的初始高度位于包括燃烧测试时线缆的起燃点在内的设定高度范围内,所述夹片垂直于线缆,所述支架位于所述指定位置时,线缆燃烧区域的线芯垂直于所述夹片并且位于两个所述夹片之间。在一种可能的实现方式中,所述测量组件包括的位移传感器位于所述夹片上,通过如下方式确定通过所述控制系统控制第二驱动组件将测量组件沿第一方向移动至线缆燃烧区域的第一端点:
17、当通过所述控制系统控制第二驱动组件将测量组件包括的夹片沿第一方向移动时,获取位移传感器实时采集的所述夹片的移动数据;
18、当所述位移传感器在多个连续时刻采集的移动数据相同时,确定所述智能测距装置上的夹片移动至线缆燃烧区域的第一端点。
19、在一种可能的实现方式中,所述确定所述测量组件沿第二方向匀速移动至线缆燃烧区域的第二端点所需的时长,包括:
20、当通过所述控制系统控制所述第二驱动组件将测量组件包括的夹片移动至线缆燃烧区域的第一端点之后,确定所述夹片沿第二方向移动时的移动速度;
21、通过所述控制系统控制所述第二驱动组件将所述夹片按照所述移动速度从所述第一端点沿第二方向移动并开始计时;
22、获取位移传感器实时采集的所述夹片的移动数据;
23、当所述位移传感器在连续两个时刻采集的移动数据相同时,确定所述夹片移动至第二端点并结束计时,得到所述夹片从所述第一端点沿第二方向移动至所述第二端点的时长。
24、在一种可能的实现方式中,所述根据所述时长以及所述测量组件移动至第二端点时的移动速度确定所述线缆燃烧区域的长度,包括:
25、根据所述夹片的厚度与所述夹片移动速度的比值以及所述时长,确定更新后的时长;
26、根据所述更新后的时长与所述夹片移动至第二端点时的移动速度确定所述线缆燃烧区域的长度。
27、在一种可能的实现方式中,所述方法还包括:当确定所述线缆燃烧结果合格时,通过所述控制系统控制所述第一驱动组件将所述支架在水平方向从所述指定位置移动至初始位置;通过所述控制系统控制所述第二驱动组件将所述测量组件移动至所述初始高度。
28、第三方面,本技术实施例提供了一种线缆燃烧结果的测量装置,包括:
29、控制模块,用于当对垂直夹持在夹具中的线缆进行燃烧测试到达设定测试时间时,通过控制系统控制第一驱动组件将支架在水平方向移动至指定位置;
30、确定模块,用于当通过所述控制系统控制第二驱动组件将测量组件沿第一方向移动至线缆燃烧区域的第一端点时,通过所述控制系统控制所述第二驱动组件将测量组件沿第二方向匀速移动至线缆燃烧区域的第二端点,并确定所述测量组件沿第二方向匀速移动至线缆燃烧区域的第二端点所需的时长,所述第二方向为所述第一方向的反方向;根据所述时长以及所述测量组件移动至第二端点时的移动速度确定所述线缆燃烧区域的长度;当所述长度满足设定条件时,确定所述线缆燃烧结果合格。
31、在一种可能的实现方式中,所述测量组件包括的夹片的初始高度位于包括燃烧测试时线缆的起燃点在内的设定高度范围内,所述夹片垂直于线缆,所述支架位于所述指定位置时,线缆燃烧区域的线芯垂直于所述夹片并且位于两个所述夹片之间。
32、在一种可能的实现方式中,所述测量组件包括的位移传感器位于所述夹片上,所述确定模块,用于通过如下方式确定通过所述控制系统控制第二驱动组件将测量组件沿第一方向移动至线缆燃烧区域的第一端点:当通过所述控制系统控制第二驱动组件将测量组件包括的夹片沿第一方向移动时,获取位移传感器实时采集的所述夹片的移动数据;当所述位移传感器在多个连续时刻采集的移动数据相同时,确定所述测量组件包括的夹片移动至线缆燃烧区域的第一端点。
33、在一种可能的实现方式中,所述确定模块,在确定所述测量组件沿第二方向匀速移动至线缆燃烧区域的第二端点所需的时长时,具体用于:
34、当通过所述控制系统控制所述第二驱动组件将测量组件包括的夹片移动至线缆燃烧区域的第一端点之后,确定所述夹片沿第二方向移动时的移动速度;
35、通过所述控制系统控制所述第二驱动组件将所述夹片按照所述移动速度从所述第一端点沿第二方向移动并开始计时;获取位移传感器实时采集的所述夹片的移动数据;当所述位移传感器在连续两个时刻采集的移动数据相同时,确定所述夹片移动至第二端点并结束计时,得到所述夹片从所述第一端点沿第二方向移动至所述第二端点的时长。
36、在一种可能的实现方式中,所述确定模块,在根据所述时长以及所述测量组件移动至第二端点时的移动速度确定所述线缆燃烧区域的长度时,具体用于:根据所述夹片的厚度与所述夹片移动速度的比值以及所述时长,确定更新后的时长;根据所述更新后的时长与所述夹片移动至第二端点时的移动速度确定所述线缆燃烧区域的长度。
37、在一种可能的实现方式中,所述控制模块还用于:当确定所述线缆燃烧结果合格时,通过所述控制系统控制所述第一驱动组件将所述支架在水平方向从所述指定位置移动至初始位置;通过所述控制系统控制所述第二驱动组件将所述测量组件移动至所述初始高度。
38、第四方面,本技术实施例提供了一种执行设备,包括存储器和处理器;所述处理器和所述存储器耦合;其中,所述存储器包括有程序指令,所述程序指令被所述处理器运行时,使得所述装置设备执行如第二方面以及第二方面不同实现方式所述的方法。
39、第五方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,当所述计算机指令在计算机上运行时,使得计算机执行第二方面以及第二方面不同实现方式所述的方法。
40、本技术实施例中提供了一种智能测距装置,通过确定智能测距装置中的夹片在燃烧区域移动的时间以及移动速度确定燃烧区域的长度,可以在不挪动样品和不打开箱门的情况下,能够快速准确确定燃烧结果,同时避免了测试人员与燃烧气体的接触。此外,本技术实施例中的智能测距装置还包括位移传感器,通过位移传感器采集的移动数据的变化可以确定夹片是否移动到燃烧区域的端点,进而可以精准的确定夹片移动的时长。
- 还没有人留言评论。精彩留言会获得点赞!