一种双差定位方法、系统及电子设备
本发明涉及定位,特别是涉及一种双差定位方法、系统及电子设备。
背景技术:
1、在良好的观测环境下,依靠全球卫星导航系统(global navigation satellitesystem,gnss)载波相位观测值的实时动态(real-time kinematic,rtk)差分技术可以得到厘米级的定位结果。但当基线过长或遮挡严重时,rtk定位性能将受到严重影响,甚至无法实现快速的高精度定位。5g作为新兴技术在定位领域得到广泛的关注,但商用5g基站受时钟成本限制,基于时间测距精度较差,无法满足工程的高精度定位需求。同时受到通信专用基站的布局设计和5g毫米波信号的传播距离等限制,5g无法向没有基站的区域提供定位服务。
技术实现思路
1、本发明的目的是提供一种双差定位方法、系统及电子设备,结合gnss载波相位和5g到达时间进行双差定位,能够提高定位精度,同时完成卫星拒止区域内的目标定位。
2、为实现上述目的,本发明提供了如下方案:
3、一种双差定位方法,包括:
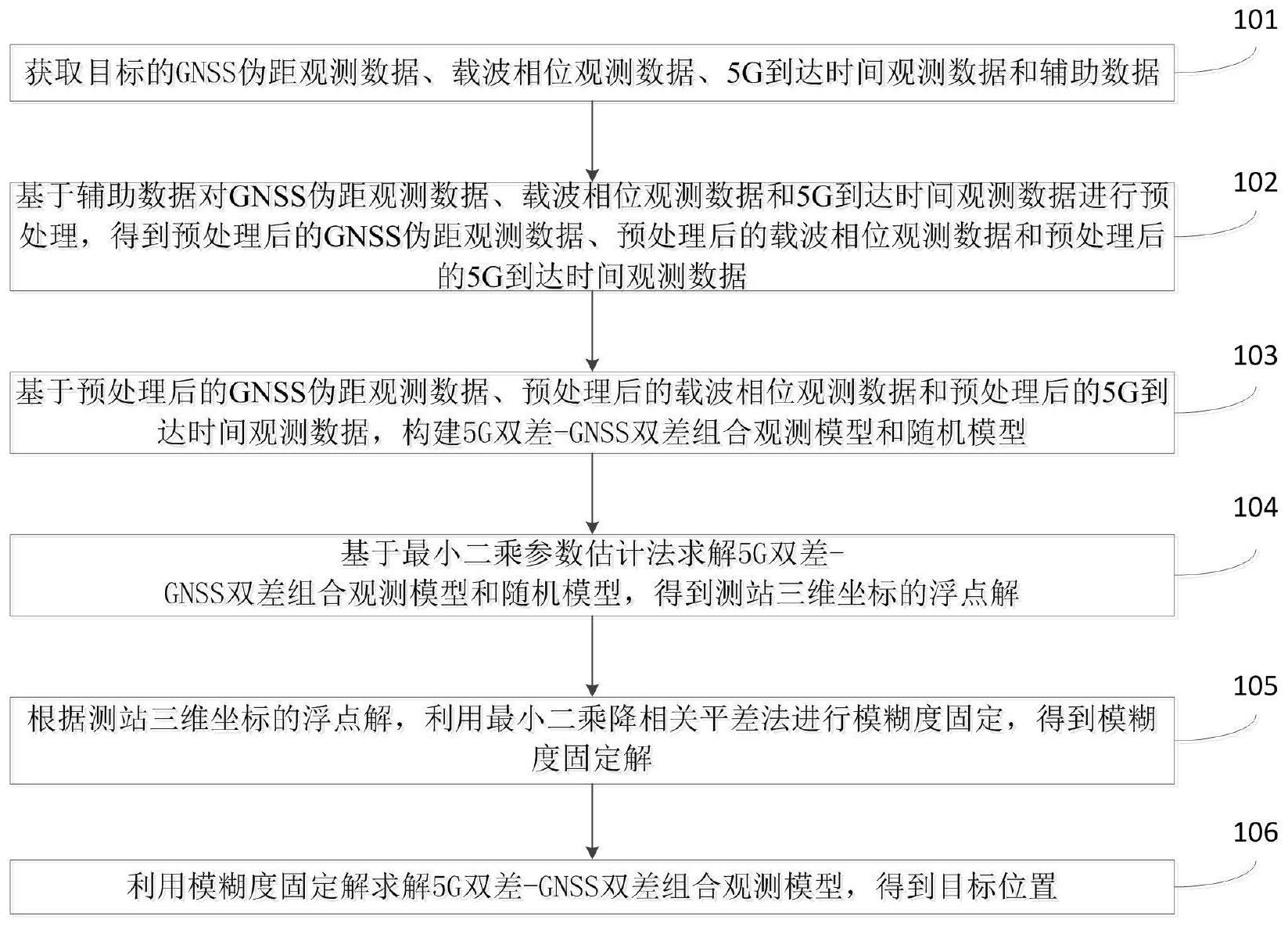
4、获取目标的gnss伪距观测数据、载波相位观测数据、5g到达时间观测数据和辅助数据;
5、基于所述辅助数据对所述gnss伪距观测数据、所述载波相位观测数据和所述5g到达时间观测数据进行预处理,得到预处理后的gnss伪距观测数据、预处理后的载波相位观测数据和预处理后的5g到达时间观测数据;
6、基于所述预处理后的gnss伪距观测数据、所述预处理后的载波相位观测数据和所述预处理后的5g到达时间观测数据,构建5g双差-gnss双差组合观测模型和随机模型;
7、基于最小二乘参数估计法求解所述5g双差-gnss双差组合观测模型和所述随机模型,得到测站三维坐标的浮点解;
8、根据测站三维坐标的浮点解,利用最小二乘降相关平差法进行模糊度固定,得到模糊度固定解;
9、利用所述模糊度固定解求解所述5g双差-gnss双差组合观测模型,得到目标位置。
10、可选的,所述辅助数据包括5g基站坐标数据、5g参考站坐标数据、gnss参考站坐标数据、gnss广播星历、天线相位中心和地球自转参数。
11、可选的,所述gnss伪距观测数据和所述载波相位观测数据均是通过gnss接收机观测得到的;所述5g到达时间观测数据是通过5g接收机观测得到的。
12、可选的,在基于所述辅助数据对所述gnss伪距观测数据、所述载波相位观测数据和所述5g到达时间观测数据进行预处理,得到预处理后的gnss伪距观测数据、预处理后的载波相位观测数据和预处理后的5g到达时间观测数据之后,还包括:
13、对预处理后的gnss伪距观测数据进行误差校正处理,得到误差校正后的gnss伪距观测数据;
14、对预处理后的载波相位观测数据进行误差校正处理,得到误差校正后的载波相位观测数据;
15、对预处理后的5g到达时间观测数据进行误差校正处理,得到误差校正后的5g到达时间观测数据。
16、可选的,所述5g双差-gnss双差组合观测模型为:
17、
18、
19、
20、其中,表示卫星s1与卫星s2星间卫星观测站i1与卫星观测站i2站间双差伪距观测值;表示卫星s1与卫星s2星间卫星观测站i1与卫星观测站i2站间双差卫地距离;ddδion表示两颗卫星相对于两个测站的电离层效应的差分;ddδtrop表示两颗卫星相对于两个测站的对流层效应的差分;ddεp表示伪距双差噪声;λ表示波长;表示卫星s1与卫星s2星间卫星观测站i1与卫星观测站i2站间双差相位观测值;表示卫星s1与卫星s2星间卫星观测站i1与卫星观测站i2站间双差模糊度;ddεφ表示相位双差噪声;c表示光速;表示基站b1与基站b2站间5g观测站j1与5g观测站j2站间5g双差观测值;表示基站b1与基站b2站间5g观测站j1与5g观测站j2站间的双差距离;ddεt表示5g双差差分噪声;表示卫星s2与卫星观测站i2的卫地距离;表示卫星s2与卫星观测站i1的卫地距离;表示卫星s1与卫星观测站i2的卫地距离;表示卫星s1与卫星观测站i1的卫地距离;表示卫星s2与卫星观测站i2的相位模糊度;表示卫星s2与卫星观测站i1的相位模糊度;表示卫星s1与卫星观测站i2的相位模糊度;表示卫星s1与卫星观测站i1的相位模糊度;p表示伪距观测值;φ表示载波相位观测值;t表示5g毫米波观测值。
21、可选的,所述随机模型为:
22、其中,σ表示卫星观测值的标准差,σ0表示天顶方向观测值的标准差;θ表示卫星高度角。
23、一种双差定位系统,包括:
24、观测数据获取模块,用于获取目标的gnss伪距观测数据、载波相位观测数据、5g到达时间观测数据和辅助数据;
25、预处理模块,用于基于所述辅助数据对所述gnss伪距观测数据、所述载波相位观测数据和所述5g到达时间观测数据进行预处理,得到预处理后的gnss伪距观测数据、预处理后的载波相位观测数据和预处理后的5g到达时间观测数据;
26、模型构建模块,用于基于所述预处理后的gnss伪距观测数据、所述预处理后的载波相位观测数据和所述预处理后的5g到达时间观测数据,构建5g双差-gnss双差组合观测模型和随机模型;
27、浮点解确定模块,用于基于最小二乘参数估计法求解所述5g双差-gnss双差组合观测模型和所述随机模型,得到测站三维坐标的浮点解;
28、模糊度固定解确定模块,用于根据测站三维坐标的浮点解,利用最小二乘降相关平差法进行模糊度固定,得到模糊度固定解;
29、目标位置确定模块,用于利用所述模糊度固定解求解所述5g双差-gnss双差组合观测模型,得到目标位置。
30、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行所述的一种双差定位方法。
31、可选的,所述存储器为可读存储介质。
32、根据本发明提供的具体实施例,本发明公开了以下技术效果:
33、本发明提供的一种双差定位方法、系统及电子设备,获取目标的gnss伪距观测数据、载波相位观测数据、5g到达时间观测数据和辅助数据;基于辅助数据对gnss伪距观测数据、载波相位观测数据和5g到达时间观测数据进行预处理,得到预处理后的gnss伪距观测数据、预处理后的载波相位观测数据和预处理后的5g到达时间观测数据;基于预处理后的gnss伪距观测数据、预处理后的载波相位观测数据和预处理后的5g到达时间观测数据,构建5g双差-gnss双差组合观测模型和随机模型;基于最小二乘参数估计法求解5g双差-gnss双差组合观测模型和随机模型,得到测站三维坐标的浮点解;根据测站三维坐标的浮点解,利用最小二乘降相关平差法进行模糊度固定,得到模糊度固定解;利用模糊度固定解求解5g双差-gnss双差组合观测模型,得到目标位置。本发明结合gnss载波相位和5g到达时间构建5g双差-gnss双差组合观测模型和随机模型进行双差定位,能够提高定位精度,同时完成卫星拒止区域内的目标定位。
- 还没有人留言评论。精彩留言会获得点赞!