城市地貌粗糙度类别和风场特性获取方法、系统、设备和介质
本发明涉及气象科学、无人机航拍与建筑技术科学的,具体涉及一种城市地貌粗糙度类别和风场特性获取方法、系统、设备和介质。
背景技术:
1、大气边界层指受到地面摩阻影响的近地大气层,是人们从事生产、生活的主要领域,地面上建筑物的风荷载直接受到大气边界层内空气流动的影响。在大气边界层内,平均风速随高度增加而增加,至大气边界层顶部达到最大,描述这种变化的曲线称为平均风速剖面。大气边界层风场特性包括平均风速剖面和湍流强度剖面,如平均风速剖面是进行超高层建筑抗风设计的重要依据和前提,因此,准确描述高层建筑所处的大气边界层风场特性,具有重要的科学意义和工程价值。
2、无人机航拍具有独特的高空视角,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点。无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。对起降场地的要求限制较小,可通过一段较为平整的路面实现起降,在获取航拍影像时不用考虑飞行员的飞行安全,对获取数据时的地理空域以及气象条件要求较低,能够解决人工探测无法达到的地区监测功能。通过无人机航拍来获得城市中心地貌照片,具有高效率、高精度、准确的地理定位等优势,并可最大限度地还原地面上有一定体积的物体。
3、我国中心城市高速地发展,地貌快速地变迁,依据规范采用常规的地貌分析方法、或借助远郊的气象塔实测数据,很难获得城市中心地貌超高层建筑群边界层风场特性的准确结果,进而影响结构风荷载及风致响应的准确评估。
4、国际上通常将地貌类别分为海上、乡村、郊区和市区4类。我国现行荷载规范也将地面粗糙度类型分为a、b、c和d共4类,分别对应海上、乡村、城市和大城市中心地貌,并参考国际规范给定了相关参数。但由于我国国内大型中心城市的建筑分布形态与国外有明显的差异,规范给定的相关风场参数的取值有待考证,如地面粗糙度指数α具有一定保守性,不利于实现工程安全性与经济性之间的平衡,相关问题亟待进一步研究解决。
技术实现思路
1、本发明的主要目的在于克服现有技术的缺点与不足,提供一种城市地貌粗糙度类别和风场特性获取方法、系统、设备和介质,通过结合多普勒激光测风雷达现场实测和无人机航拍,来获取目标场地处远场来流风速剖面的真实风速特性,理论上减小了近场地貌对远场来流边界层风场特性的影响而造成的误差,比通过直接采用规范理论风场模型来近似表征所研究的建筑位置处远场来流风的边界层风场特性更准确,能够为高层建筑风荷载的精细化评估提供科学依据。
2、为了达到上述目的,本发明采用以下技术方案:
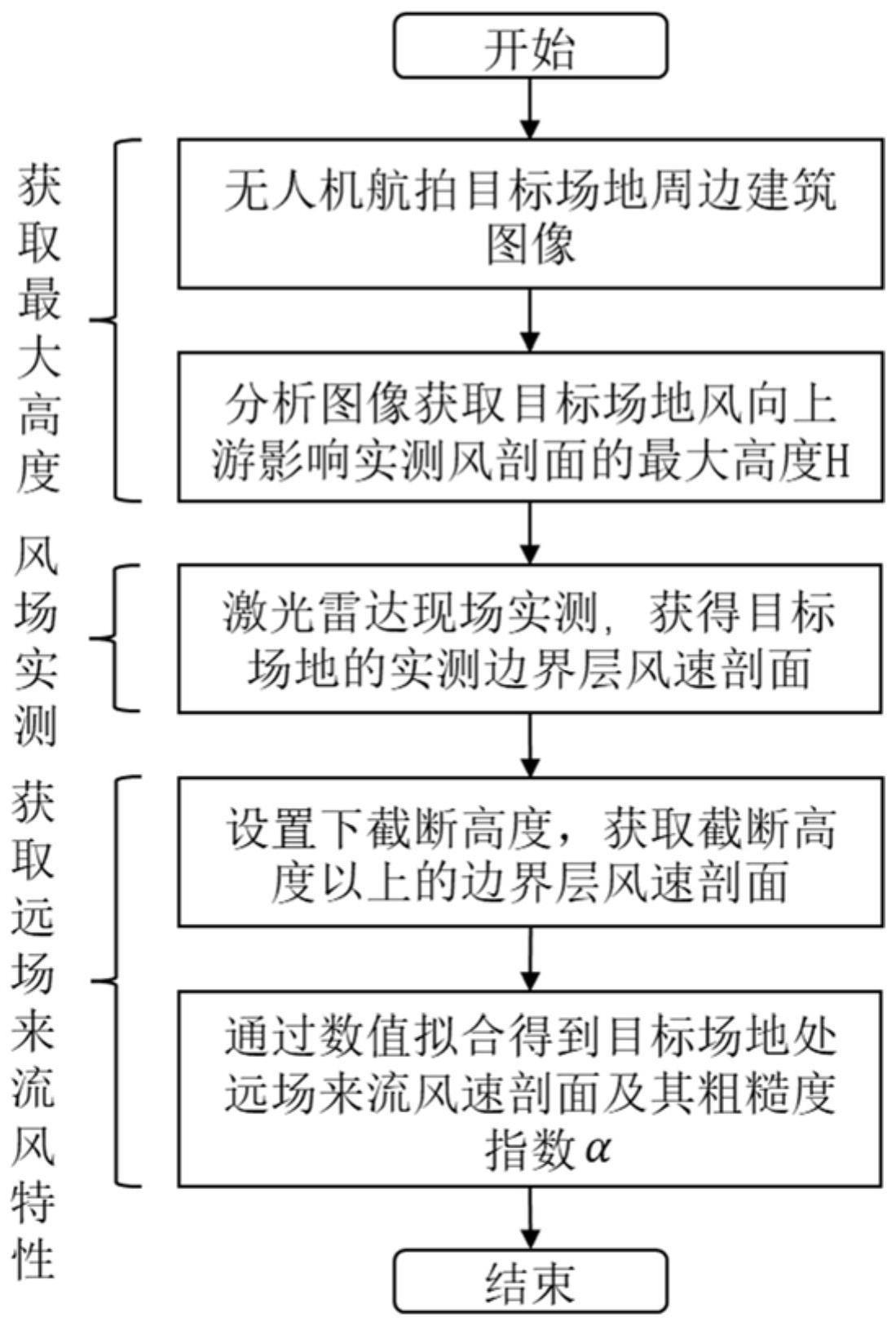
3、第一方面,本发明提供了一种城市地貌粗糙度类别和风场特性获取方法,包括下述步骤:
4、根据无人机航拍,获取目标场地风向上游影响实测风速剖面的建筑最大高度h;
5、根据激光雷达实测风场,获得目标场地的实测边界层风速剖面;
6、根据所述目标场地风向上游影响实测风速剖面的建筑最大高度h,截取此最大高度h以上的目标场地实测边界层风速剖面,通过数值拟合,得到目标场地处远场来流风速剖面及其粗糙度指数α。
7、作为优选的技术方案,所述根据无人机航拍,获取目标场地风向上游影响实测风速剖面的建筑最大高度h,具体为:
8、无人机航拍获取目标场地风向上游的近场地貌图像;
9、根据所述近场地貌图像,获取图像中最高建筑的阴影长度l;
10、基于阴影长度l,采用如下公式计算最高建筑的高度h:
11、
12、其中:
13、l——建筑的阴影长度,单位m;
14、h——建筑的实际高度,单位m;
15、——太阳高度角,单位rad。
16、作为优选的技术方案,所述太阳高度角通过下述方式计算得到:
17、根据无人机航拍的经纬度位置,北京时间,采用如下公式计算得到真太阳时:
18、真太阳时=北京时间-a+x
19、其中:
20、a——当地时间与北京时间的时间差,a=4*(120-当地经度),单位min;
21、x——真平太阳时差,单位min;
22、根据真太阳时,采用如下公式计算得到太阳时角:
23、ψ=(真太阳时-12)*π/12
24、其中:
25、ψ——太阳时角,单位rad;
26、根据无人机航拍的经纬度位置,北京时间,采用如下公式计算得到此位置的太阳赤纬角:
27、sinδ=0.39795*cos[0.98563*(n-173)/180*π]
28、其中:
29、δ——赤纬角,地球赤道平面与太阳和地球中心的连线之间的夹角,在±23°26′的范围内移动,单位rad
30、n——无量纲日数,自每年1月1日开始计算;
31、根据所述太阳时角、太阳赤纬角以及无人机航拍的经纬度位置,采用如下公式计算得到此位置的太阳高度角:
32、
33、作为优选的技术方案,所述根据激光雷达实测风场,获得目标场地的实测边界层风速剖面,具体为:
34、基于多普勒激光测风雷达现场实测,获取目标场地的平均风速剖面,所述目标场地满足激光测风雷达以与地面成一定俯仰角发射的激光波束不会被建筑遮挡。
35、作为优选的技术方案,得到目标场地处远场来流风速剖面及其粗糙度指数α,具体为:
36、根据规范指数律模型拟合所述平均风速剖面,得到建成建筑风向上游的实测粗糙度指数α,采用如下公式进行拟合:
37、
38、其中:
39、z——离地高度,单位m;
40、zr——参考高度,单位m;
41、u(z)——离地高度z处的风速,单位m/s;
42、u(zr)——离地高度z处的风速,单位m/s;
43、α——无量纲地面粗糙度指数。
44、第二方面,本发明提供了一种城市地貌粗糙度类别和风场特性获取系统,应用于所述的城市地貌粗糙度类别和风场特性获取方法,包括高度实测模块、风场实测模块以及远场来流风场特性获取模块;
45、所述高度实测模块,用于根据无人机航拍,获取目标场地风向上游影响实测风速剖面的建筑最大高度h;
46、所述风场实测模块,用于根据激光雷达实测风场,获得目标场地的实测边界层风速剖面;
47、所述远场来流风场特性获取模块,用于根据所述目标场地风向上游影响实测风速剖面的建筑最大高度h,截取此最大高度h以上的目标场地实测边界层风速剖面,通过数值拟合,得到目标场地处远场来流风速剖面及其粗糙度指数α。
48、第三方面,本发明提供了一种电子设备,所述电子设备包括:
49、至少一个处理器;以及,
50、与所述至少一个处理器通信连接的存储器;其中,
51、所述存储器存储有可被所述至少一个处理器执行的计算机程序指令,所述计算机程序指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述的城市地貌粗糙度类别和风场特性获取方法。
52、第四方面,本发明提供了一种计算机可读存储介质,存储有程序,所述程序被处理器执行时,实现所述的城市地貌粗糙度类别和风场特性获取方法。
53、本发明与现有技术相比,具有如下优点和有益效果:
54、本发明基于多普勒激光测风雷达现场实测的风场特性结果,并在此基础上结合无人机航拍获取目标场地风向上游影响实测风速剖面的建筑最大高度h,能够准确获得目标处受远场地貌影响的大气边界层真实风场特性,理论上减小了近场地貌对远场来流边界层风场特性的影响而造成的误差,比通过直接采用规范理论风场模型来近似表征所研究的建筑位置处远场来流风的边界层风场特性更准确,能够为高层建筑风荷载的精细化评估提供科学依据。
- 还没有人留言评论。精彩留言会获得点赞!