一种无人值守的平台式惯性导航产品测试方法及测试装置与流程
本发明涉及航空机载惯性导航设备测试,具体为一种无人值守的平台式惯性导航产品测试方法及测试装置。
背景技术:
1、惯性导航产品(以下简称“惯导产品”)是飞机的主要导航设备,目前普遍采用的是平台式和捷联式。本发明重点解决某系列平台式惯导产品。该系列产品采用动力调谐陀螺仪和单晶硅挠性加速度计,是一种自主式、高精度的挠性平台式惯性导航系统。它为飞机提供加速度、速度、位置、航向、姿态等信息。平台式惯导由于机械特性和制造原因,系统修理过程中需要进行大量的测试和参数补偿。测试全面性、补偿的准确性直接决定了产品质量。
2、目前普遍应用的惯性导航系统测试设备通常采用的是单步调试的测试方法,该方法通过手动拨动开关实现对惯导进行供电、启动;通过旋钮发送不同工作状态的指令(包含对准,加速度计标定、陀螺仪标定、漂移测试、漂移补偿、导航、精度测试)控制产品的工作方式。测试过程中需要操作者一直在设备操作界面观察产品工作状态、输出数据,并手动计算补偿参数进行补偿。该方法存在测试方法复杂、测试耗时长、人工消耗大且存在计算、补偿错误等风险,不满足产品实际修理需要。
3、舰船电子工程2014年第6期(总第240期)vol.34no.6发表一篇“惯性导航计算机通用检测仪的设计与应用”的论文,文中的检测系统由硬件平台和软件平台构成,采用了工业标准pc104总线接口组成的ate结构模式。硬件平台的核心是测试机箱,主要由测试计算机主机、同步通讯模块、模拟量采集模块、开关量控制模块、总线转接模块、供电转换模块等组成等构成,完成惯性导航计算机检测任务的核心功能部件主要是测试计算机系统,用于在惯导系统测试过程中对惯导系统进行通讯数据采集、模拟量数据采集和开关量控制与监测,并实现与相关外设间的信息交互。该检查仪主要用于检测二次电源电压、对准结果、导航数据、陀螺工作状态、导航结果等。缺点如下:一是,该检查仪虽实现了通过连接电缆、惯导识别电路和测试软件对被检测对象的自动识别及自检和性能检测的自动控制,但未完成面向全测试过程的无人值守测试方案,程序提示确认正确性后需测试人员确认才继续运行;二是,该型检查仪检查的产品是二次电源电压、对准结果、导航数据、陀螺工作状态、导航结果等,只是对产品的输出参数进行了采集,不能对产品的参数进行补偿,修正。
4、中国专利201410649225.x“一种激光捷联惯性导航系统测试方法及系统”公布了一种惯性导航系统的测试方法:采用系统初始化、惯导数据接收、惯导性能检测、对准数据检查、导航数据检查、惯导参数检查、日志记录、测试结果处理等步骤;通过该测试方法,可以实现在外场条件下对激光捷联惯性导航系统的功能及性能测试工作,实现在机上不离位条件下对惯导系统性能及主要参数检测,并智能化对惯导系统工作状态提出建议。该方法的缺点是只采集了产品输出的对准数据、导航数据等参数,对结果的合格性进行简单的判断而不能对在参数进行补偿、修正。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种无人值守的平台式惯性导航产品测试方法及测试装置。能够模拟飞机向惯导系统提供电源并能自动的接通和断开产品、能够自动输入控制指令控制产品的工作状态,测试不同状态下的性能参数,并对参数进行存储、显示、计算,同时在测试过程对陀螺和加速度计进行自动标定,对漂移进行自动补偿并对精度进行测试和计算。从而实现产品的自动测试、补偿和合格性判断,整过过程无需人工干预,达到了无人值守的效果。
2、本发明所要解决的技术问题采用以下技术方案来实现:
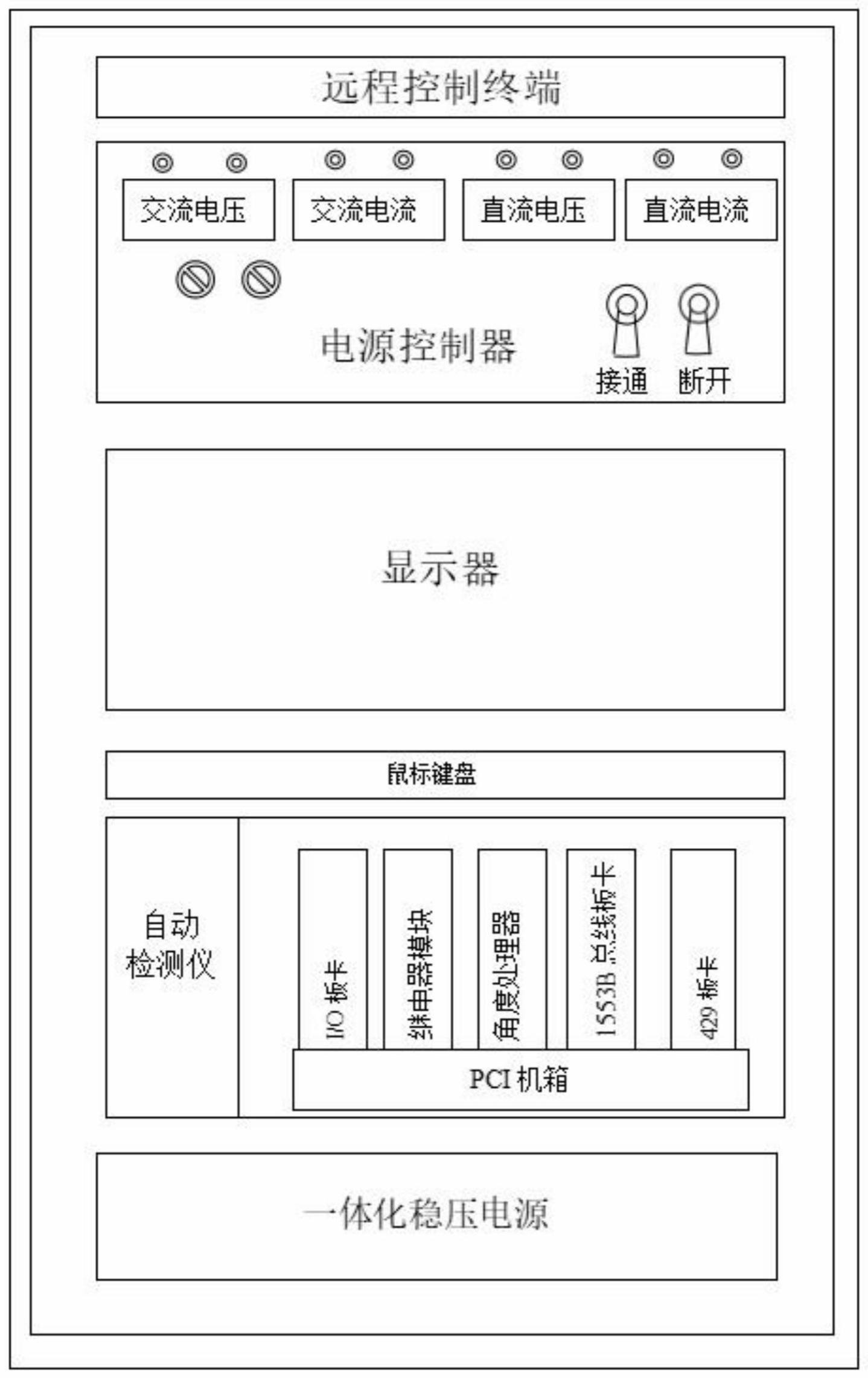
3、一种无人值守的平台式惯性导航产品测试装置,包括机柜,还包括设置在所述机柜上的电源控制器、远程控制终端、自动检测仪以及一体化稳压电源,所述电源控制器通过检测电缆与所述远程控制终端、自动检测仪以及一体化稳压电源连接,所述远程控制终端通过检测电缆与所述自动检测仪连接,所述自动检测仪连接有显示器及键鼠且通过检测电缆与惯导产品连接,所述一体化稳压电源通过检测电缆与惯导产品连接。
4、优选地,包括人工模式和无人值守模式,所述远程控制终端用于对所述人工模式和无人值守模式进行模式选择控制。
5、优选地,所述远程控制终端上设置有接通、断开开关,所述人工模式通过接通、断开开关进行控制。
6、优选地,所述电源控制器采用指示灯指示、数字表显示、外测孔检测以及保险丝保护,以对所述一体化稳压电源上的115v/400hz三相交流电压、电流和直流28v电压、电流进行显示、控制和保护;
7、人工模式下通过电源控制器上的开关控制产品的产品的接通和断开,通过旋钮控制产品的不同工作状态;
8、无人值守模式下通过自动测试仪发送产品的接通断开指令和产品的工作状态指令,通过远程控制终端进行转化,由电源控制器进行接通断开指令和产品工作状态操作。
9、优选地,所述自动检测仪包括pci机箱、设置在所述pci机箱上的i/o板卡、继电器模块、角度处理器、1553b通讯板卡以及429板卡,所述无人值守模式通过所述继电器模块进行控制,所述i/o板卡、1553b通讯板卡以及429板卡与惯导产品连接;
10、所述自动检测仪还包括能够实时采集、显示参数,并能够根据产品输出的参数变化和反馈的工作状态等信息对惯导产品进行控制、计算的测试软件。
11、优选地,所述一体化稳压电源用于为惯导产品提供115v/400hz三相交流电压、电流和直流28v电压、电流。
12、一种无人值守的平台式惯性导航产品测试方法,应用上述的一种无人值守的惯导产品测试装置,包括以下步骤:
13、步骤(1)首先进行试验前准备,通过检测电缆将检测装置上的各个结构进行连接,连接后检查检测电缆是否正确连接;
14、步骤(2)接通外部220v/50hz电源,检查稳压电源输出115v/400hz交流电压、直流28v电压,自动检测仪启动;
15、步骤(3)自动检测仪启动测试程序:完成初始化和硬件自检,包括板卡自检和电源检测,用户可以根据需要对被测产品所在地的经纬度信息进行设置,默认状态为上次设置值;
16、步骤(4)自动检测仪启动测试任务:测试任务默认为产品调试全部工序;
17、步骤(5)用户可在试验前根据需要删去不需要的工序或者在试验项目列表中增加需要重复进行的工序,测试过程中有停止选项,可以在任意状态停止产品的工作;
18、步骤(6)测试任务主界面的中央是数据通讯界面,可以显示被测惯导系统输出的总线数据,测试主界面的下方是当前试验项目、被测系统编号及测试数据的存储路径,用户可以根据需要进行更改;
19、步骤(7)用户选择自动测试时,检测装置依据默认工序依次进行测试,测试包括对准测试、加速度计标定测试、陀螺标定测试、漂移测试及补偿、航向及姿态本轴误差测试以及产品精度测试;
20、步骤(8)上述工作完成后,操作者可点击“报告”选项查阅测试报告。
21、优选地,步骤(4)中全部工序包括有:对准状态工序、加速度计标定工序、陀螺标定工序、标定后再对准工序、漂移测试及补偿工序、航向及姿态本轴误差测试工序、产品精度测试工序。
22、优选地,步骤(7)中各个测试具体如下:
23、步骤(71)对准测试:
24、步骤(711)自动检测仪根据测试程序发送接通产品指令,接通电源控制器进行供电,并通过总线发送惯导初始位置,即当地经纬度;
25、步骤(712)被测的惯导产品在接通电源后开始工作,测试装置采集被测的惯导产品输出的总线数据,采集的总线数据包括内部温度,俯仰角、倾斜角、航向角、加速度计输出的脉冲数,产品游移角、真航向、系统工作时间;
26、步骤(713)系统完成8分钟的对准工作,输出“准航”指令,通过采集惯导输出的指令和参数判断对准过程是否完成,如自动检测仪发送“工作”指令给被测的惯导产品,被测的惯导产品转工作状态后工作1分钟,发送“关闭电源”指令,切断电源控制器供电,被测的惯导产品停止工作;
27、步骤(72)加速度计标定测试:
28、步骤(721)测试软件根据被测的惯导产品的标定流程启动标定程序,控制电源控制器对被测的惯导产品进行供电;
29、步骤(722)测试软件输入“标定模式”指令,惯导工作在开环状态,测试软件开始采集陀螺漂移测试,当惯导三个轴的常值变化量小于0.01°/h时,测试软件输入“标定加速度计”指令,惯导开始标定程序:
30、步骤(7221)测试软件输入“水平闭路”指令,水平回路工作在闭路状态,测量天向加速度计输出的脉冲nz+,测试周期为500s;
31、步骤(7222)测试软件控制自动测试仪向惯导内部的力矩电机施加力矩使平台绕y轴偏转90°,测量天向加速度计输出的脉冲nz-,测试周期为500s;
32、步骤(7223)再绕z轴分别旋转0°、90°、180°、270°,在每个位置上,水平闭路测试500s,0°、180°位置测量到x轴加速度计输出的nx-、nx+,90°、270°位置测量到y轴加速度计输出的ny-、ny+;
33、步骤(7224)六位置标定完成后,测试软件通过自动测试仪使平台绕y轴旋转-180°,使其回到0°,并使系统处于开路补偿状态;
34、步骤(723)测试软件根据所测量的nx-、nx+、ny-、ny+、nz-、nz+六个脉冲数,依据该型惯导的导航原理计算出加速度计零位偏移、对准用刻度因素、导航用刻度因素等参数,并将该参数写入惯导相应的存储单元中;
35、步骤(724)参数发送完成后,软件自动将标定参数进行存储后发送“关闭电源”指令,切断电源控制器供电,被测的惯导产品停止工作;
36、步骤(73)陀螺标定测试:
37、步骤(731)测试软件根据被测的惯导产品的陀螺标定流程启动标定程序,控制电源控制器对被测的惯导产品进行供电;
38、步骤(732)测试软件输入“标定模式”指令,惯导工作在开环状态,测试软件开始采集陀螺漂移测试,当惯导三个轴的常值变化量小于0.01°/h时,测试软件输入“标定陀螺仪”指令,惯导开始标定程序:
39、步骤(7321)在原位置闭路测漂500s;
40、步骤(7322)完成后测试软件控制自动测试仪向电机施距,先使平台绕x轴偏转4°,再施加负力矩使其偏转-4°;
41、步骤(7323)测试软件采集陀螺标定数据并计算x轴、y轴、z轴的进动系数,标定完成后,将计算的进动系数送入被测的惯导产品进行参数修正;
42、步骤(733)同时软件自动将标定参数进行存储后发送“关闭电源”指令,切断电源控制器供电,被测的惯导产品停止工作;
43、步骤(74)漂移测试及补偿:
44、步骤(741)测试软件通过发送“测漂”指令启动被测的惯导产品并进行漂移测试,控制电源控制器对被测的惯导产品进行供电,惯导产品完成对准后进入导航模式,测试软件每10s读取一次产品输出的参数,包括陀螺常值漂移、游移角、平台航向、水平轴输出的脉冲数,测试时间为60min;
45、步骤(742)测试完成后,根据被测的惯导产品原理设计出漂移补偿修正量公式,用于补偿;
46、步骤(743)计算完成后,测试软件自动将参数送入被测的惯导产品进行修正;
47、步骤(744)测试软件将参数进行存储,完成后发送“关闭电源”指令,切断电源控制器供电,被测的惯导产品停止工作;
48、步骤(75)航向及姿态本轴误差测试:
49、步骤(751)测试软件启动测试程序,控制电源控制器对被测的惯导产品进行供电;
50、步骤(752)进行三次被测的惯导产品的对准和导航测试,并在测试中读取陀螺温度参数、游移角参数、航向角参数、平台偏角参数、陀螺常值参数、姿态角参数;
51、步骤(753)根据误差补偿公式进行计算,补偿,完成后发送“关闭电源”指令,切断电源控制器供电,被测的惯导产品停止工作;
52、步骤(76)产品精度测试:
53、步骤(761)软件启动测试程序,控制电源控制器对被测的惯导产品进行供电;
54、步骤(762)进行85min精度测试,测试数据包含产品温度,俯仰角、倾斜角、航向角、加速度计输出的脉冲数,线速度、系统工作时间;
55、步骤(763)软件根据被测的惯导产品输出的脉冲数计算线速度、根据线速度计算导航精度,根据俯仰角、倾斜角、航向角计算角度精度;
56、步骤(764)将计算的结果进行存储,完成后发送“关闭电源”指令,切断电源控制器供电,被测的惯导产品停止工作。
57、本发明的有益效果是:
58、与现有技术相比,本发明通过研制无人值守的检测装置对惯导系统能够进行全自动的电源控制、工作状态控制、对性能参数进行自动采集、存储、显示、计算和补偿,在测试过程中无需人工干预,简化了系统测试流程、缩短了测试时长、节约了人工成本,同时规避了人工值守导致的漏测率,提升了产品交付效率和修理质量。
- 还没有人留言评论。精彩留言会获得点赞!