带航迹维护的序贯融合双传感器JPDA多目标跟踪方法
本发明涉及航迹规划,尤其涉及一种带航迹维护的序贯融合双传感器jpda多目标跟踪方法。
背景技术:
1、目标跟踪是指利用传感器所获得的量测信息来估计目标状态,包括目标的数目、位置、速度、加速度和航迹等信息。随着传感器技术的不断发展,基于各种类型传感器(如雷达、红外、声呐、激光、多光谱和高光谱等)的目标跟踪系统相继出现,并应用于不同的场合。
2、目前常用的多传感器融合方法有分布式、集中式、混合式,将多传感器融合方法与多目标跟踪方法所结合,来达到多传感器多目标跟踪的效果。但是现在基于联合联合概率数据互联的多传感器多目标跟踪方法都是跟踪多目标数目已知的情况,这不符合实际,若有目标突然出现或者消失则无法进行判断,所以考虑将航迹维护与其结合,才能更好的符合实际情况。
3、若将分布式传感器多目标跟踪与航迹维护所结合,当多传感器生成的航迹数目不同时,则无法进行目标状态信息和协方差信息融合,系统会崩溃。若将集中式传感器多目标跟踪与航迹维护所融合,虽然会有更精确的目标信息,但也接收了每个传感器的杂波信息,会造成系统误跟踪的情况,而且过量的量测信息会导致运算速度大大下降。
4、相比于上述两种常用的多传感器融合方法,将序贯融合多传感器多目标跟踪与航迹维护所结合可以跟踪目标数目不定的多目标跟踪问题。
技术实现思路
1、根据现有技术存在的问题,本发明公开了一种带航迹维护的序贯融合双传感器jpda多目标跟踪方法,具体包括如下步骤:
2、s1:采用双传感器序贯收集量测信息,基于传感器接收真实目标量测误差特性,采用聚类方法判定未来航迹,其中量测信息包括真实目标和杂波信息;
3、s2:对符合聚类的量测信息进行加权融合处理,下一时刻第一传感器若有量测、并融合后结果满足速度法判定关系,则认为航迹起始成功;若有多个量测时,并融合后结果满足速度法判定关系,则第一时刻聚类的位置与马氏距离写最近的量测关联,判定航迹起始成功;
4、s3:当有一确认航迹在序贯接收多个传感器的量测情况下,仍没有量测与确认航迹关联,则认为该确认航迹消失,删除该确认航迹;
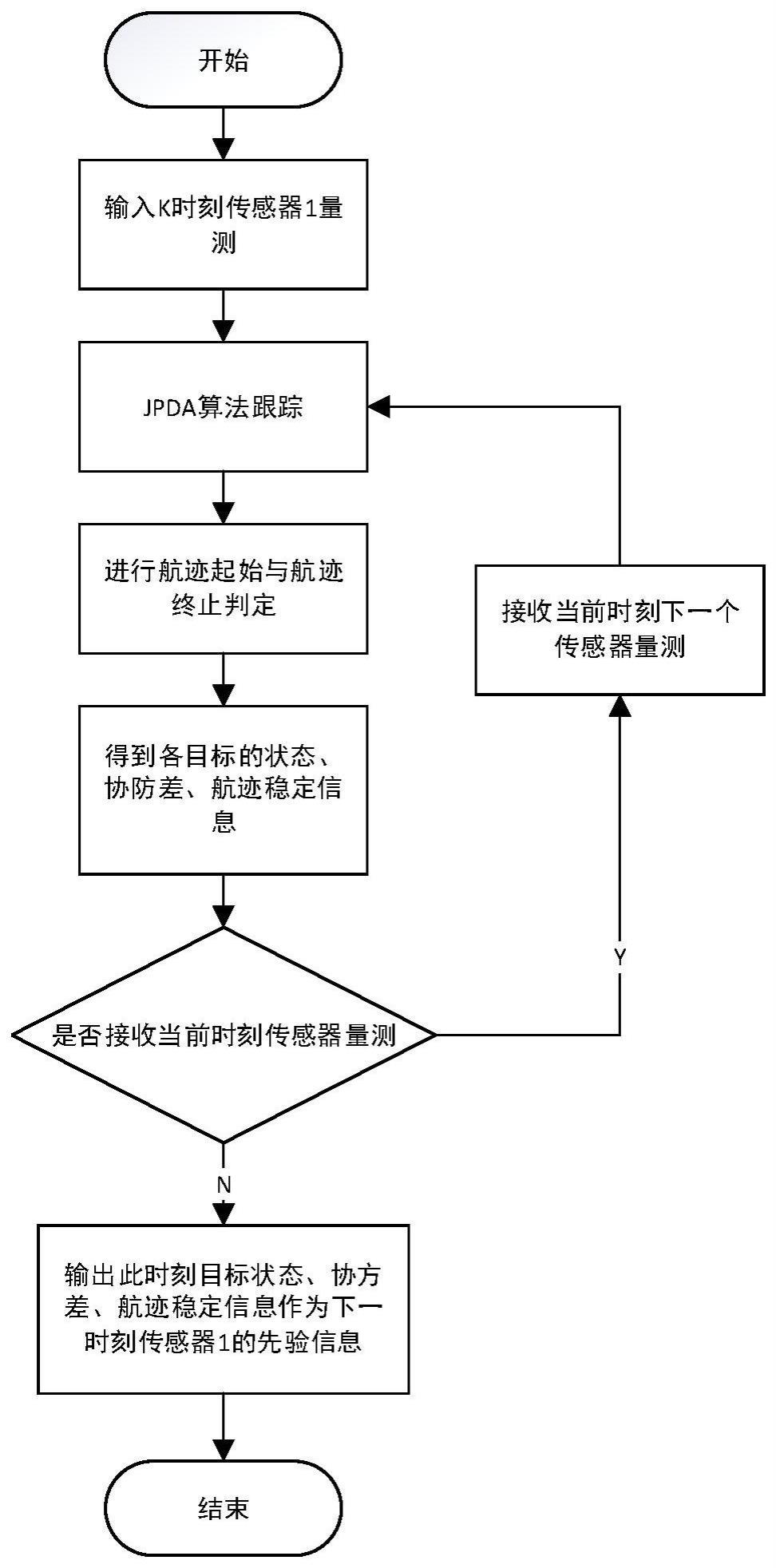
5、s4:对于航迹起始成功的目标,每一时刻通过序贯双传感器联合概率数据互联方法进行跟踪,首先通过处理第一传感器的量测信息得到位置和协方差估计,将其作为处理第二传感器的预测步信息,并利用第二传感器量测更新这一时刻的位置和协方差估计,作为下一时刻的先验信息;
6、s5:当第一传感器和第二传感器接收量测时刻满足t2=nt1,在相同时刻进行序贯处理,若某时刻只有第一传感器接收到量测,则用第一传感器对目标进行更新位置和协方差。
7、采用聚类方法判定未来航迹时具体采用如下方式:
8、s11:在k时刻序贯接收第一传感器的量测信息和第二传感器的量测信息
9、s12:根据两个传感器对同一真实目标量测的定位误差进行分析,若两个传感器的量测定位同一个真实目标,则两个量测位置应在一个矩形误差区域范围内;
10、s13:判断两个传感器量测产生聚类关系采用如下方法:若k时刻有第一传感器的量测和第二传感器的量测满足以下关系式则满足聚类条件,其中gm大小设置根据两个传感器对真实目标的定位误差所决定:
11、
12、s14:若在二维情况,第一传感器的量测对真实目标的偏差为am,第二传感器的量测对真实目标的偏差为bm,则gm大小取两个传感器的最大偏差的距离,如下式:
13、
14、s15:对于满足聚类条件的第一传感器、第二传感器的量测点,认为其是可能航迹点。
15、s21:如果k时刻第一传感器的量测和第二传感器的量测满足s1聚类条件,聚类后位置用两个量测中间位置代替,如下式:
16、
17、φj(k)为聚类后的位置;
18、s22:如果量测满足s21聚类条件关系,在k+1时刻,若聚类后的位置φj(k)与第一传感器的量测或第二传感器的量测满足速度法判定关系,则认为其是确认航迹,速度法判定关系式如下:
19、
20、其中vmin和vmax为估计目标的最小速度与最大速度,t为间隔时间,该目标起始位置为并且目标的估计速度v为:
21、
22、s23:若k时刻第一传感器的量测并未与第二传感器的任何量测产生聚类关系,判断第一传感器量测是否与k+1时刻第一传感器的量测满足速度法判定关系,若满足速度判定关系则为可能航迹,速度法判定关系如下式:
23、
24、其中vmin和vmax为估计目标的最小速度与最大速度,t为间隔时间;
25、s24:如果两个传感器量测满足s23的条件,如果测与k+1时刻第二传感器量测满足聚类法判定关系,则认为其是确认航迹,起始位置为聚类后的位置φj(k+1),确认航迹初始速度为v,计算式如下:
26、
27、
28、s25:若k时刻第二传感器的量测并未与第一传感器的任何量测产生聚类关系,判断第二传感器量测是否与k+1时刻第一传感器的量测满足速度法判定关系,若满足速度判定关系则为可能航迹,速度法判定关系如下式:
29、
30、s26:如果传感器量测满足s25的条件,如果量测与k+1时刻第二传感器量测满足聚类法判定关系,则认为其是确认航迹,否则撤销该可能航迹;起始位置为聚类后的位置φj(k+1),确认航迹初始速度为v,计算式如下:
31、
32、
33、s51:第一传感器和传感器接收量测时刻满足t2=nt1,以t2=2t1为例,若k时刻接受第一传感器的量测,则对只利用第一传感器量测对确认航迹、可能航迹进行状态处理;
34、s52:若k时刻确认目标未与任何量测关联,则直接对该目标进行状态递推处理,并且航迹稳定性加1,如果航迹稳定性等于5,则删除该确认航迹;
35、s53:若k时刻确认目标与量测关联,对确认航迹目标与波门内量测进行处理,得到目标的状态和协方差信息,并且航迹稳定值为0;
36、s54:对于k时刻可能航迹与波门外量测进行航迹起始判断,航迹起始条件是序贯接收4个传感器,满足一次聚类法判定和一次速度法判定则认为其航迹起始成功;
37、s55根据s53、s54、s55得到k时刻航迹信息,包括确认目标的状态和协方差,确认目标的航迹稳定值和可能航迹;
38、s56:若k+1时刻序贯接收第一传感器、第二传感器的量测,处理方式同s4;
39、s57:根据s56得到k+1时刻航迹信息,包括确认目标的状态和协方差,确认目标的航迹稳定值和可能航迹;
40、s58:重复上述步骤直到处理完所有时刻信息。
41、由于采用了上述技术方案,本发明提供的一种带航迹维护的序贯融合双传感器jpda多目标跟踪方法,该方法将多传感器量测信息应用于多目标航迹起始和终止上,可以在更短的时刻对目标完成起始和消失的判定,将序贯融合思想应用到多目标跟踪上,即使在多个传感器探测概率较低的情况下,用本专利方法进行跟踪,融合后结果也比单一高探测概率的效果好,因此该方法解决了传统多传感器联合概率数据互联无法跟踪多目标数目不确定的问题。
- 还没有人留言评论。精彩留言会获得点赞!