融合InSAR和北斗的城市沉降监测方法
本发明涉及城市沉降监测,具体为融合insar和北斗的城市沉降监测方法。
背景技术:
1、城市沉降监测涉及城市规划、建设、环境和社会稳定等多个方面。通过监测城市沉降情况,可以确保城市的基础设施安全和稳定运行,预防潜在的地质灾害风险,如地面塌陷和滑坡,保护城市和居民免受灾害的威胁。因此,需要构建一种城市沉降监测方法。
2、为解决上述问题,本文提出了融合insar和北斗的城市沉降监测方法。insar与北斗融合监测城市沉降具有多方面优势。首先,该方法能够克服insar技术受天气条件限制的问题,因为北斗系统提供了全球范围的稳定定位服务,保证监测的连续性和实时性。其次,insar技术能够提供高时空分辨率的监测数据,结合北斗系统的定位精度,能够在城市范围内获得更全面、精确的沉降信息。这对于及时发现城市沉降问题、预防灾害风险、保障城市基础设施安全和科学规划城市发展具有重要意义。
3、与申请号cn201910358418.2专利名称“一种基于sar数据与gnss数据的基础设施沉降监测方法及系统”的技术对比:
4、“一种基于sar数据与gnss数据的基础设施沉降监测方法及系统”公开了一种基于sar数据与gnss数据的基础设施沉降监测方法及系统,该专利更偏向于系统的介绍,对算法的说明比较少,比如没有涉及到获取北斗gnss卫星获取待测区域三维形变的相关算法,另外该专利说明的sar数据处理方式以及sar数据与gnss数据的融合方法均与本专利不同,本专利详细说明了sbas-insar技术获取研究区域的los向形变速率和时间序列累积形变量的步骤,然后采用普通克里金法获取待测点三维方向的形变大小,以及采用直接分解法进行数据融合的方法。
5、与申请号cn201810752884.4专利名称“一种基于高分影像和升降轨insar的堤坝沉降监测方法”的技术对比:
6、“一种基于高分影像和升降轨insar的堤坝沉降监测方法”公开了一种利用高分影像和升降轨insar数据实现堤坝沉降监测的方法,该专利与本专利应用的原始数据和沉降监测方法均不同,没有涉及到北斗卫星数据获取与融合。本专利采用了insar数据和北斗数据融合的方法,实现了城市沉降监测。
技术实现思路
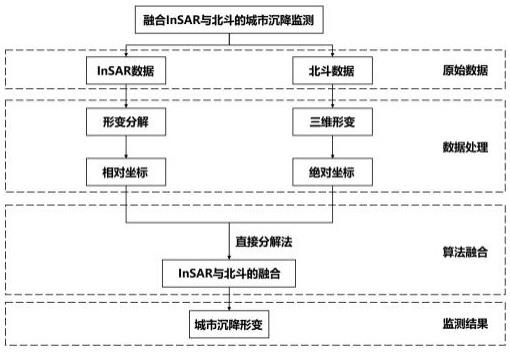
1、为解决上述技术问题,本发明提供了一种变电站监控场景下的进场人员监测方法,根据待测点的insar卫星遥感数据以及北斗监测数据,采用sbas-insar技术获取研究区域的los向形变速率和时间序列累积形变量;根据北斗监测点数据,采用普通克里金法获取待测点三维方向的形变大小;最后采用直接分解法,融合北斗三维形变数据和sbas-insar技术获取的los向形变数据,解算出研究区地表的三维形变结果。
2、为实现上述目的,本发明采取的技术方案是:
3、融合insar和北斗的城市沉降监测方法,包括如下步骤:
4、s1:原始数据获取:
5、原始数据获取包括待测点的insar卫星遥感数据以及北斗监测数据;
6、s2:数据处理:
7、数据处理包括两部分;
8、第一部分是是根据卫星遥感数据,采用sbas-insar技术原理,得到监测区域的高精度形变序列,然后对insar三维形变模型进行分解,得到监测点los向、竖直向、东西向和南北向的位移;
9、第二部分是根据北斗监测点数据,采用普通克里金法获取待测点三维方向的形变结果;
10、s3:算法融合:
11、算法融合包括采用直接分解法融合insar的一维形变数据和北斗的三维形变结果,解算出待测区域的三维形变场;
12、s4:监测结果;
13、监测结果包括待测区域在东西、南北和竖直向的形变量和形变速率。
14、作为本发明进一步改进,所述步骤s2数据处理第一部分研究区域的los向形变速率和时间序列累积形变量的获取,sar卫星发射与接收来自地面目标点反射回来的电磁波信号表示为:
15、
16、其中,2π为sar与地面监测点的单程距离相位;r为sar传感器中心与地面测量点的倾斜距离;λ为sar传感器发射电磁波的波长;φobj为地面监测点由于散射产生的随机相位;地面待测点p两次测量得到的sar影像为c1和c2,其中c1、c2分别为主、辅影像,两幅影像的辐射信息分别表示为:
17、c1=a1eiφ1,c2=a2eiφ2 (2)
18、干涉相位数学模型为:
19、
20、其中,φ1、φ2为主、辅影像包含的相位信息,和为两次待测点散射造成的随机相位;
21、则主、辅影像真实相位信息的数学函数模型表示为:
22、
23、两次获得该目标点时,其地面监测点散射产生的随机相位保持基本不变,即有则数学模型化简为:
24、
25、其中,dlos为los方向的insar地面形变量。
26、作为本发明进一步改进,所述步骤s2 sbas-insar技术原理包括下六个步骤:
27、a.根据研究时间与区域概况,采用sentinel-1a雷达数据,定义研究区域的各角点位置的坐标轴值或矢量范围,对原始影像数据进行配准、镶嵌与裁剪等数据预处理工作;
28、b.根据研究区域裁剪的影像数据集,生成基线估计结果,给定组合所需的时间域与空间域基线的临界值,进行超级主影像与各幅辅影像之间的组合与像对的筛选工作,生成相对连接图,减少时空失相干的影响;
29、c.差分干涉图由符合配准阈值的各幅影像对进行干涉处理生成,采用外部参考dem数据参与辅助计算,结合空间滤波方法,对差分干涉图中的平地相位、高程相位与噪声相位进行去除,采用相位解缠方法对差分干涉图中保留的真实相位进行处理,获得干涉图的相位解缠结果;
30、d.以相干性计算结果为基准,选取相干性高的点作为高相干目标点,去除解缠结果中包含的误差相位的影响;
31、e.sbas第一步反演;
32、根据最小二乘原理,采用svd方法对观测方程中的系数矩阵进行分解,对误差方程进行求解,获取初次反演估计的地面形变速率与用于二次相位解缠的地形残差相位;
33、f.sbas第二步反演;
34、根据第一步反演得到的形变速率结果,选择合适的大气层延迟滤波参数,对大气噪声相位进行计算与改正,同时采用地理编码方法进行结果处理,最终计算得到研究区域内的地面形变时间序列。
35、作为本发明进一步改进,所述步骤s2 insar三维形变分解如下;
36、根据雷达侧视观测几何,insar监测沿传感器成像方向的形变可分解为地表在竖直向、东西向和南北向的位移,则竖直向形变表示为:
37、
38、其中θ为雷达波束入射角,α为航向角,以顺时针方向为正;
39、当同时考虑竖直向形变和水平位移时,los向、竖直向、东西向和南北向位移表示为:
40、dlos=dvcos(θ)-sin(θ)cos(α)de+sin(θ)sin(α)dn (7)
41、令sx=-sin(θ)cos(α),sy=sin(θ)sin(α),sz=cos(θ),则s=[sx sy sz]为insar的los向监测数据在三维方向的投影矢量。
42、作为本发明进一步改进,所述步骤s2数据处理第二部分根据北斗监测点数据,采用普通克里金法获取竖直方向的形变结果,其基本步骤为:
43、a.半方差函数建模,基于采样点的数据,通过计算样本之间的半方差(半变异)来描述空间变异性,确定不同距离和方向上的样本值之间的变异程度。根据所得到的半方差函数数据,选择合适的理论模型来拟合实际变异性。
44、b.半方差函数参数估计,通过最小二乘法或其他拟合方法来拟合实际半方差数据,从而获得模型参数的最佳估计。
45、c.样本点间的距离计算,计算每个插值位置与已知采样点之间的距离。
46、d.权重计算,基于半方差函数的模型和距离信息,为每个插值位置计算与已知采样点之间的权重。这些权重指示了各个采样点对插值位置的贡献程度,通常距离越近、半方差值越小的采样点权重越大。
47、e.克里金方程求解,使用已知采样点的属性值和相应的权重,根据普通克里金方程计算插值位置上的预测值。
48、f.插值表面生成,对所有插值位置应用普通克里金方程,可以生成一个连续的插值表面,反映了属性值在整个研究区域内的空间分布。
49、g.交叉验证与模型评估,使用交叉验证等方法,在已有的采样点数据上进行验证,并计算预测值与实际观测值之间的误差。
50、使用arcgis软件的geostatistical analyst模块可以对待测区域的北斗监测点进行普通克里金插值试验分析,获得了目标区域的三维形变结果。
51、作为本发明进一步改进,步骤s3中insar与融合获取地表三维形变场的原理与方法,采用直接分解法,将insar视线向的一维形变数据通过一定的解析关系进行分解,并利用北斗的东西和南北向数据作为约束条件,获得监测点的竖直向形变,从而解算出三维形变场:
52、
53、其中ve、vn、vv分别为东西、南北和竖直向的形变速率;dlos为insar在视线向的一维形变量;dx、dy、dz分别为北斗在东西、南北和竖直向的形变量。
54、本发明与现有技术相比,具有以下优点:
55、本文提出了融合insar和北斗的城市沉降监测方法。insar与北斗融合监测城市沉降具有多方面优势。首先,该方法能够克服insar技术受天气条件限制的问题,因为北斗系统提供了全球范围的稳定定位服务,保证监测的连续性和实时性。其次,insar技术能够提供高时空分辨率的监测数据,结合北斗系统的定位精度,能够在城市范围内获得更全面、精确的沉降信息。这对于及时发现城市沉降问题、预防灾害风险、保障城市基础设施安全和科学规划城市发展具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!