一种井下寻北定向方法和装置与流程
本发明涉及井下定向相关,尤其涉及一种井下寻北定向方法和装置。
背景技术:
1、井下寻北定向在测井领域中起着至关重要的作用,井下的严峻环境条件很大程度限制了有效技术的选择,一些技术不能被简单地使用。测井的常规方法是用地磁测量技术,主要采用磁通门作为传感器测量元件,通过测量地球磁场变化确定磁性方位,来确定钻井姿态。地磁测量技术容易受到外界磁场的干扰,磁场异常的地质条件乃至特殊天文现象都将导致仪器测量精度下降。
2、随着mems陀螺仪工艺水平的提高,通过陀螺仪感知地球自转的特性确定自转方位,基于mems陀螺仪的井下定向系统逐渐在测井领域中崭露头角。现有的陀螺寻北算法使用二位置或四位置,在水平基座下通过旋转单轴陀螺仪至对称位置抵消陀螺仪零偏与标度因素,提高寻北精度,但是井下环境几乎全为倾斜基座,无法保证能旋转至对称位置,且井下测井仪器只能自转,无法改变仪器方位,因此难以应用现有寻北陀螺算法实现井下寻北定向。
技术实现思路
1、本发明提供一种井下寻北定向方法和装置,能避免外界干扰,使测井仪器在倾斜基座条件下,无需严格四对称位置即可通过旋转自转轴实现井下寻北定向。
2、本发明提供的具体技术方案如下:
3、一方面,本发明提供的一种井下寻北定向方法包括:
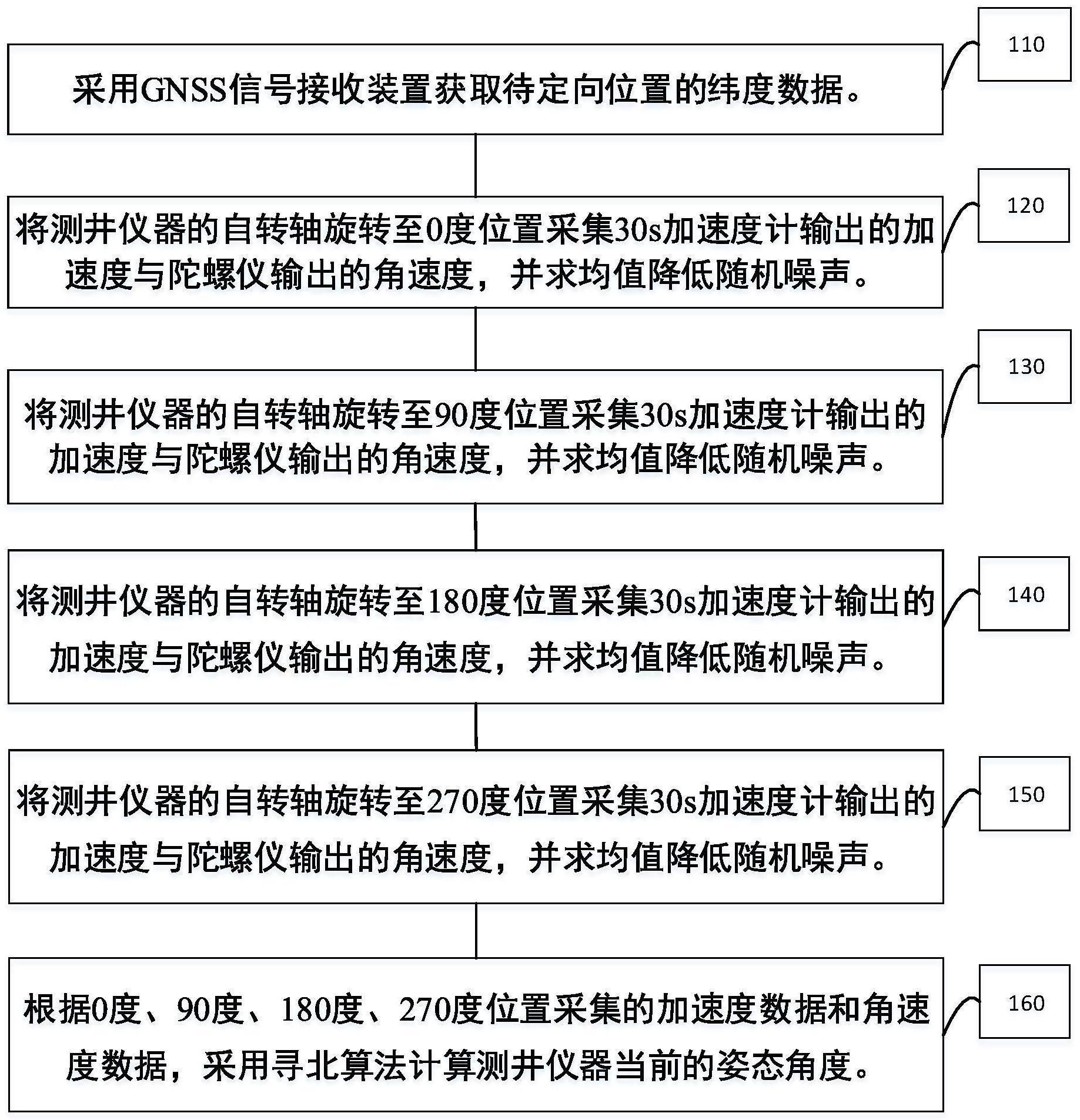
4、(1)采用gnss信号接收装置获取待定向位置的纬度数据;
5、(2)将测井仪器的自转轴旋转至0度位置采集30s加速度计输出的加速度与陀螺仪输出的角速度,并求均值降低随机噪声;
6、(3)将测井仪器的自转轴旋转至90度位置采集30s加速度计输出的加速度与陀螺仪输出的角速度,并求均值降低随机噪声;
7、(4)将测井仪器的自转轴旋转至180度位置采集30s加速度计输出的加速度与陀螺仪输出的角速度,并求均值降低随机噪声;
8、(5)将测井仪器的自转轴旋转至270度位置采集30s加速度计输出的加速度与陀螺仪输出的角速度,并求均值降低随机噪声;
9、(6)根据0度、90度、180度、270度位置采集的加速度数据和角速度数据,采用寻北算法计算测井仪器当前的姿态角度。
10、可选的,0度、90度、180度、270度位置采集的加速度数据分别为0度、90度、180度、270度位置采集的角速度数据分别为
11、可选的,所述采用寻北算法计算测井仪器当前的姿态角度包括:
12、根据0度位置采集的加速度计输出的加速度数据计算初始位置的水平姿态;
13、根据0度、90度、180度、270度四个位置采集的加速度计输出的加速度数据计算四个位置的准确角度差;
14、将所述水平姿态、所述准确角度差、待定向位置的纬度数据和0度、90度、180度、270度四个位置采集的陀螺仪输出的角速度输入矩阵方程ax=b求解,其中:gx为四个位置x轴陀螺仪输出角速度,gy为四个位置y轴陀螺仪输出角速度,gz为四个位置z轴陀螺仪输出角速度;
15、
16、其中,φ为俯仰角,θ为横滚角,航向角ψ;δ=(δ0,δ1,δ2,δ3)为四个位置角度差;l为待定向位置的纬度;
17、获取矩阵方程ax=b的第一值和第二值作反正切函数求得待定向位置的航向角度
18、根据水平姿态和航向角度得到测井仪器当前的姿态角度为(θ,φ,ψ)。
19、可选的,根据0度位置采集的加速度计输出的加速度数据计算初始位置的水平姿态包括:
20、根据公式和计算初始位置的水平姿态的横滚角θ和俯仰角φ,其中,a0为0度位置的三轴加速度计输出加速度数据为0度位置的三轴加速度计输出的x轴加速度数据,为0度位置的三轴加速度计输出的y轴加速度数据,为0度位置的三轴加速度计输出的z轴加速度数据。
21、可选的,根据0度、90度、180度、270度四个位置采集的加速度计输出的加速度数据计算四个位置的准确角度差包括:
22、分别根据公式和计算0度、90度、180度、270度四个位置的准确角度差,其中,为0度位置的三轴加速度计输出的x轴加速度数据,为0度位置的三轴加速度计输出的z轴加速度数据,为90度位置的三轴加速度计输出的x轴加速度数据,为90度位置的三轴加速度计输出的z轴加速度数据,为180度位置的三轴加速度计输出的x轴加速度数据,为180度位置的三轴加速度计输出的z轴加速度数据,为270度位置的三轴加速度计输出的x轴加速度数据,为270度位置的三轴加速度计输出的z轴加速度数据。
23、另一方面,本发明提供一种井下寻北定向装置包括:
24、获取模块,用于采用gnss信号接收装置获取待定向位置的纬度数据;
25、第一采集模块,用于将测井仪器的自转轴旋转至0度位置采集30s加速度计输出的加速度与陀螺仪输出的角速度,并求均值降低随机噪声;
26、第二采集模块,用于将测井仪器的自转轴旋转至90度位置采集30s加速度计输出的加速度与陀螺仪输出的角速度,并求均值降低随机噪声;
27、第三采集模块,用于将测井仪器的自转轴旋转至180度位置采集30s加速度计输出的加速度与陀螺仪输出的角速度,并求均值降低随机噪声;
28、第四采集模块,用于将测井仪器的自转轴旋转至270度位置采集30s加速度计输出的加速度与陀螺仪输出的角速度,并求均值降低随机噪声;
29、处理模块,用于根据0度、90度、180度、270度位置采集的加速度数据和角速度数据,采用寻北算法计算测井仪器当前的姿态角度。
30、可选的,0度、90度、180度、270度位置采集的加速度数据分别为0度、90度、180度、270度位置采集的角速度数据分别为
31、可选的,所述处理模块包括:
32、第一处理子模块,用于根据0度位置采集的加速度计输出的加速度数据计算初始位置的水平姿态;
33、第二处理子模块,用于根据0度、90度、180度、270度四个位置采集的加速度计输出的加速度数据计算四个位置的准确角度差;
34、第三处理子模块,用于将所述水平姿态、所述准确角度差、待定向位置的纬度数据和0度、90度、180度、270度四个位置采集的陀螺仪输出的角速度输入矩阵方程ax=b求解,其中:gx为四个位置x轴陀螺仪输出角速度,gy为四个位置y轴陀螺仪输出角速度,gz为四个位置z轴陀螺仪输出角速度;
35、
36、其中,φ为俯仰角,θ为横滚角,航向角ψ;δ=(δ0,δ1,δ2,δ3)为四个位置角度差;l为待定向位置的纬度;
37、第四处理子模块,用于获取矩阵方程ax=b的第一值和第二值作反正切函数求得待定向位置的航向角度
38、第五处理子模块,用于根据水平姿态和航向角度得到测井仪器当前的姿态角度为(θ,ψ,ψ)。
39、可选的,所述第一处理子模块具体用于:
40、根据公式和计算初始位置的水平姿态的横滚角θ和俯仰角ψ,其中,a0为0度位置的三轴加速度计输出加速度数据为0度位置的三轴加速度计输出的x轴加速度数据,为0度位置的三轴加速度计输出的y轴加速度数据,为0度位置的三轴加速度计输出的z轴加速度数据。
41、可选的,所述第二处理子模块具体用于:
42、分别根据公式和计算0度、90度、180度、270度四个位置的准确角度差,其中,为0度位置的三轴加速度计输出的x轴加速度数据,为0度位置的三轴加速度计输出的z轴加速度数据,为90度位置的三轴加速度计输出的x轴加速度数据,为90度位置的三轴加速度计输出的z轴加速度数据,为180度位置的三轴加速度计输出的x轴加速度数据,为180度位置的三轴加速度计输出的z轴加速度数据,为270度位置的三轴加速度计输出的x轴加速度数据,为270度位置的三轴加速度计输出的z轴加速度数据。
43、本发明具有如下有益技术效果:
44、本发明实施例提供一种井下寻北定向方法和装置,通过将测井仪器的自转轴分别旋转至0度、90度、180度、270度位置并采集对应位置的加速度数据和角速度数据,之后采用寻北算法计算测井仪器当前的姿态角度,通过加速度计在四位置的输出的三轴分量,使用反三角函数求解倾斜基座条件下的水平姿态以及旋转四位置的准确角度,解决了现有陀螺寻北算法只能在水平基座条件下旋转四对称位置进行寻北定向的技术问题,而且通过采用旋转自转轴计算井下角度,解决了现有陀螺寻北算法只能转动方位轴的技术缺陷,通过测量四位置地球自转角速度与重力加速度,对称位置相减消除陀螺仪常值漂移,然后对相减之后的两个差相除消除陀螺仪标度因素,根据加速度计的三轴分量形成的三角关系,使用反三角函数计算俯仰角和横滚角,根据陀螺仪的三轴分量形成的三角关系,使用反三角函数计算航向角,得到井下姿态,避免了井下复杂地质环境与极端天气等外界干扰因素影响井下寻北定向算法的精度。
- 还没有人留言评论。精彩留言会获得点赞!