一种基于视觉振动测量的漂浮式风机状态监测方法
本发明涉及漂浮式风机状态监测,尤其涉及一种基于视觉振动测量的漂浮式风机状态监测方法。
背景技术:
1、漂浮式风机在服役期间将面临长时间、连续性各类海洋环境载荷,严重影响漂浮式风机运行的稳定性和安全性,为及时发现安全隐患,对其系统状态响应进行监测是十分必要的。
2、漂浮式风机将风力发电机组安装漂浮式平台上,再通过系泊系统实现平台相对定位。漂浮式平台的运动会引起风机较大的动力学响应,而运动的稳定性与风轮发电机组的发电量效率及系统安全性密切相关。塔筒作为漂浮式风机的重要支撑结构,搭载大型风轮发电机组并连接漂浮式平台,其结构的可靠性关系到风力发电机的稳定运行。因此,漂浮式平台和塔筒结构的可靠性和稳定性是漂浮式风机系统的安全运行的基础,也是整个漂浮式风机能否长时间的稳定运行的关键。漂浮式风机长期运行在环境恶劣的远海地区,面临复杂的风浪流载荷,在运行期间会不断经受环境侵蚀、材料老化、疲劳效应、载荷效应等,结构的损伤将不断产生和累积,发生突发事故的可能性也不断增大。
3、漂浮式风机的系统响应可通过多项指标,如倾斜角度、加速度等反应。传统的监测系统采用的加速度计、光纤等传感器,往往需要安装在被测物体上,这不仅需要耗费大量的人力物力财力,还会对被测物体产生质量负载,进而影响结构动态特性。而非接触式传感器一般依靠某种电磁辐射传输振动信息,常用的有基于微波干涉仪的振动测量、基于毫米波传感器的振动测量、激光测量法等等,但这类方法都受到测量仪器测量范围的限制,存在无法进行多尺度和全场测量等问题,难以对漂浮式风机这类大型结构物进行有效的状态监测。基于视觉的运动测量方法常用的有数字图像相关法、光流法、基于相位的视频运动估计方法。数字图像相关法和光流法直接在原始图像中提取物体的运动信号,抗环境噪声能力差、对没有明显纹理的区域提取效果较差,往往需要在目标物体上粘贴辅助标记来提高识别的准确度。
4、不同于数字图像相关和光流法直接对原始图像的像素值进行操作,基于相位的运动估计方法利用不同方向和不同尺度的二维高波(2d gabor)滤波器将视频每一帧映射到新的空间频率域,并通过连续帧间的相位差分实现振动信号提取。因此,基于相位的视频运动估计方法有较强的抗噪声能力,不需要粘贴额外的标记物就能对物体运动进行识别。但基于相位的视频运动估计方法仅能识别单点x、y方向运动,通过读取感兴趣的点处的运动时历识别物体单自由度运动,如悬臂梁、大桥等物体的振动,而漂浮式风机的运动响应具有多自由度耦合的特征,无法进行状态监测。
5、因此,本领域的技术人员致力于开发一种基于视觉振动测量的漂浮式风机状态监测方法,对基于相位的视频运动估计方法进行进一步的探索。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是:浮式风机状态监测中传感器只能进行局部、定点振动信号监测,因此对浮式风机这类大型工程结构物往往需要大量安装传感器在浮式风风机结构上,会给结构带来额外的质量负载效应,且价格昂贵、布置费时费力;浮式风机状态监测中无法对浮式风机多自由度耦合的特征进行识别。
2、为实现上述目的,本发明提供了一种基于视觉振动测量的漂浮式风机状态监测方法,包括以下步骤:
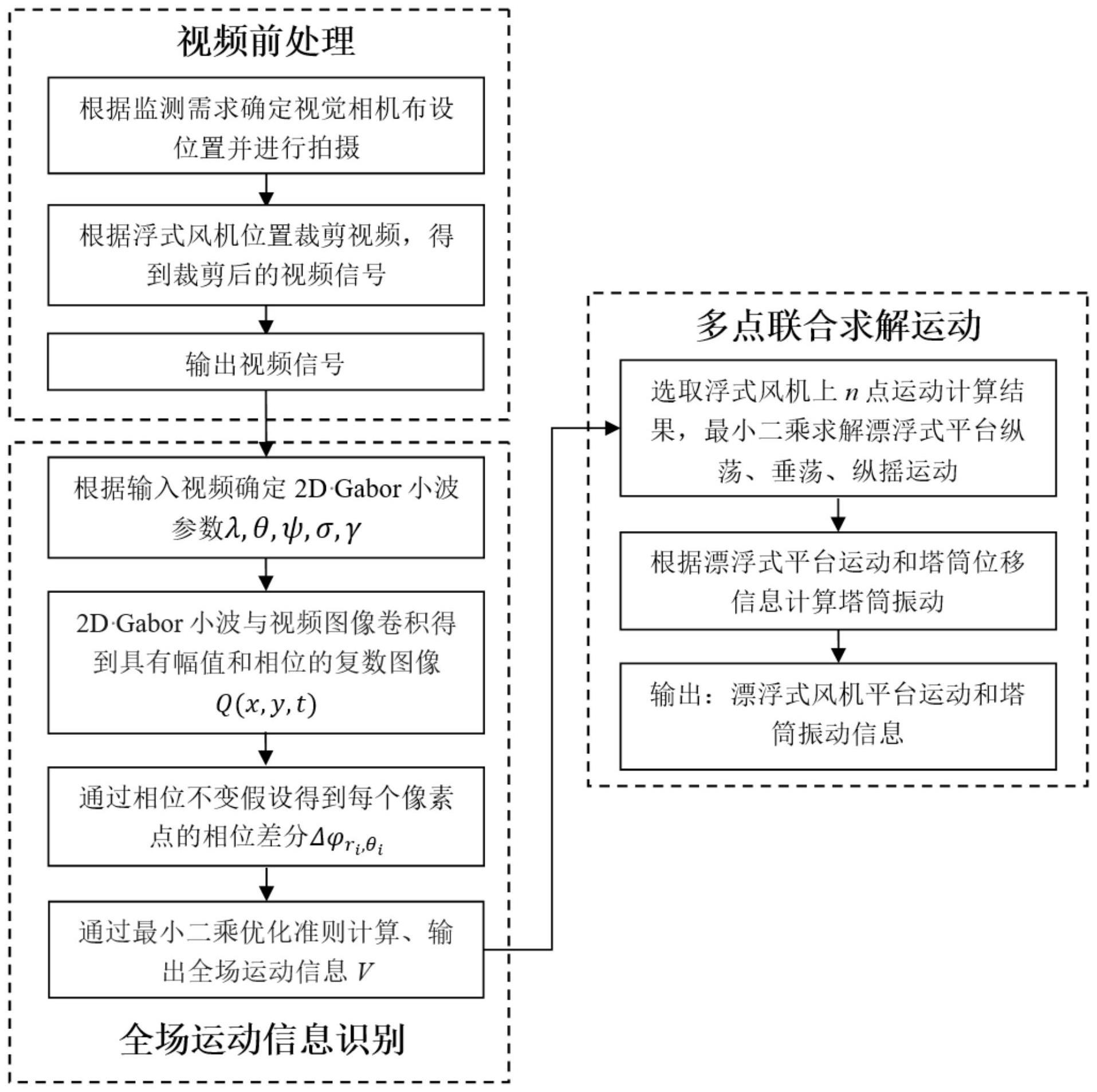
3、步骤1、根据浮式风机监测需求确定视觉相机布设位置和数量,对浮式风机运行状态进行拍摄,并对原始视频进行裁剪、去噪前处理,输出前处理后的视频信号;
4、步骤2、对步骤1中输出的视频信号中每一帧每一个像素点位的运动位移进行求解,获得全场运动信息;
5、步骤3、通过空间多点联合求解,以进一步实现漂浮式平台运动和塔筒振动的精确计算。
6、进一步地,所述步骤1中,所述根据浮式风机监测需求确定视觉相机布设位置和数量包括根据实际波浪方向以及风机叶片方向来确定。
7、进一步地,当视觉相机布设位置选在风机叶片正前方或正后方时,能够对漂浮式平台横荡、垂荡、横摇运动以及塔筒左右方向振动进行监测;当视觉相机布设位置选在风机叶片正侧方时,能够对漂浮式平台纵荡、垂荡、纵摇运动以及塔筒前后方向振动进行监测。
8、进一步地,所述步骤2中,所述对步骤1中输出的视频信号中每一帧每一个像素点位的运动位移进行求解,基于相位的视频运动估计方法采用复数方向可控金字塔算法。
9、进一步地,所述步骤2包括以下步骤:
10、步骤2.1、根据步骤1中输出的视频信号确定2d gabor滤波器中的gabor小波的一组参数,所述一组参数包括gabor小波的波长、方向、相位偏移、高斯带宽、长宽比;
11、步骤2.2、将gabor小波与视频图像卷积得到具有幅值和相位的复数图像;
12、步骤2.3、通过相位不变假设得到每个像素点的相位差分;
13、步骤2.4、通过最小二乘优化准则计算、输出全场运动信息。
14、进一步地,所述步骤2.1中,gabor小波是一种高斯调制的复正弦函数:
15、
16、式中,(x,y)为像素坐标;x′=xcosθ+ysinθ,y′=-xsinθ+ycosθ;λ,θ,ψ,σ,γ分别为代表2d gabor小波的波长、方向、相位偏移、高斯带宽、长宽比的一组参数;j为虚数符号,j2=-1。
17、进一步地,所述步骤2.2具体包括:在t时刻图像亮度值为i(x,y,t),通过与不同尺度、不同方向的2d gabor小波进行卷积运算,将图像i(x,y,t)分解到空间频率域,得到具有幅值和相位的复数图像:
18、
19、式中:q为输出的复数图像,cθ为2d gabor滤波器中的gabor小波函数;ar,θ为复数图像的局部幅值,为局部相位,r表示复数金字塔层数;复数金字塔不同尺度由图像下采样获得,即每层图像尺寸逐层缩小0.5倍,方向θ取2方向或4方向,其中2方向指水平和竖直方向,4方向为θ=0°,θ=45°,θ=90°,θ=135°。
20、进一步地,所述步骤2.3具体包括:假设相位法图像的相位不变,即(x,y,t0)处的相位在经过微小位移(u(x,y,t0),v(x,y,t0))后相位保持不变,对其进行泰勒展开并忽略高阶项后,得如下表达式:
21、
22、式中:为位置(x,y)处的相位差分,其中包含了物体的局部运动位移信息(u,v);
23、所述步骤2.4具体包括:为实现对局部运动(u,v)的精确估计,建立最小二乘优化准则:
24、
25、整理后,速度矩阵解析解表示为:
26、v=(zτwz)-1(zτwy)
27、式中:v表示运动位移矩阵(u,v,t0),y表示向量w表示对角线元素为的对角矩阵,z表示矩阵
28、对视频中每一帧每一个像素点位的运动位移进行求解,进而获得全场运动信息。
29、进一步地,所述步骤3包括以下步骤:
30、步骤3.1、选取浮式风机上n点运动计算结果,最小二乘求解漂浮式平台纵荡、垂荡、纵摇运动;
31、步骤3.2、根据漂浮式平台运动和塔筒位移信息计算塔筒振动;
32、步骤3.3、输出漂浮式风机平台运动和塔筒振动信息。
33、进一步地,所述步骤3具体包括:
34、将漂浮式平台视作刚体,而塔筒视为柔性体悬臂梁,并将漂浮式风机坐标系建立在重心(x0,y0)处,漂浮式平台在纵荡、垂荡、纵摇的耦合运动下,点(x,y)的位移(u,v)表达为:
35、
36、式中,s、h、p分别表示漂浮式平台的纵荡、垂荡和纵摇运动;对上式中的三角函数进行近似化处理,其中sinp=p,cosp=1-0.5p2,并忽略高阶小项;通过脚本自动随机选取漂浮式平台上的n个点,对得到的n组方程进行最小二乘化求解,表达式为:
37、
38、式中,w1、w2为权重系数;
39、联合求解得到每一时刻漂浮式平台的纵荡、垂荡和纵摇运动(s,h,p);
40、对于塔筒上某点(x,y)在x方向的位移,由漂浮式平台的纵摇、纵荡运动以及塔筒自身前后向振动叠加而成,表达为:
41、ut=s+bcosp+(x-x0)cosp+(y-y0)sinp
42、式中:ut表示塔筒的x方向的绝对总位移,b表示塔筒自身振动;
43、由此计算得到漂浮式风机塔筒的振动信息。
44、与现有技术相比,本发明主要具有以下优点:
45、(1)通过基于相位的视觉振动测量方法,采用高空间分辨率的视觉相机传感器,可实现非接触式、远距离、高空间分辨率监测浮式风机,大大提高了传感器监测的空间分辨率,能够实现全场测量;大量减少了传感器布置数量,视觉相机作为非接触式传感器不会产生额外的质量负载效应,简化了布置过程、降低了成本。
46、(2)对基于视觉的振动处理方法识别到的振动信号进一步处理,采用二维运动解析方法对浮式风机多自由度耦合运动特征的各分量运动特征进行识别、分解,可实现浮式风机纵荡、垂荡、横荡、纵摇、横摇运动以及塔筒振动的同步测量,为漂浮式风机健康状态评估和故障诊断与运维提供有效测量手段。
47、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
- 还没有人留言评论。精彩留言会获得点赞!