一种激光测高数据辅助的卫星线阵影像拼接方法及系统与流程
本公开实施例涉及卫星影像拼接,尤其涉及一种激光测高数据辅助的卫星线阵影像拼接方法及系统。
背景技术:
1、目前,高分辨率线阵推扫式卫星多采用延迟积分电荷耦合器件(time delayedand integration charge-coupled device,tdi-ccd)设计,以此获取高质量卫星影像,同时为了增加幅宽,在焦平面上一般会交错排列安装多个电荷耦合器件(charge-coupleddevice,ccd)。在实际使用时一般会将多个ccd获取的影像进行拼接后提供给用户使用。目前影像拼接方式主要有两种:基于像方的影像拼接和基于物方的影像拼接。基于像方的影像拼接主要是在影像重叠区进行同名点匹配,以此获得影像间的平移或者仿射关系,进而完成影像间的拼接。这种方法严重依赖影像匹配精度,往往拼接精度较低,同时没有考虑卫星平台稳定性,对于影像内部存在的畸变不能很好的消除,影响后续的应用。基于物方的影像拼接主要是基于影像严密成像几何模型,通过构建统一的影像成像模型完成各ccd影像的对应关系构建,最终实现影像的高精度拼接。这种方法可以确保影像几何无缝,并且消除影像内部畸变,但是没有其他辅助数据,拼接影像的几何定位精度依赖卫星量测数据,导致最终的几何精度不甚理想。
技术实现思路
1、本公开实施例的目的在于提供一种激光测高数据辅助的卫星线阵影像拼接方法及系统,从而解决现有技术中存在的前述问题。
2、为了实现上述目的,本公开实施例采用的技术方案如下:
3、本公开实施例一方面提供了一种激光测高数据辅助的卫星线阵影像拼接方法,所述方法包括:
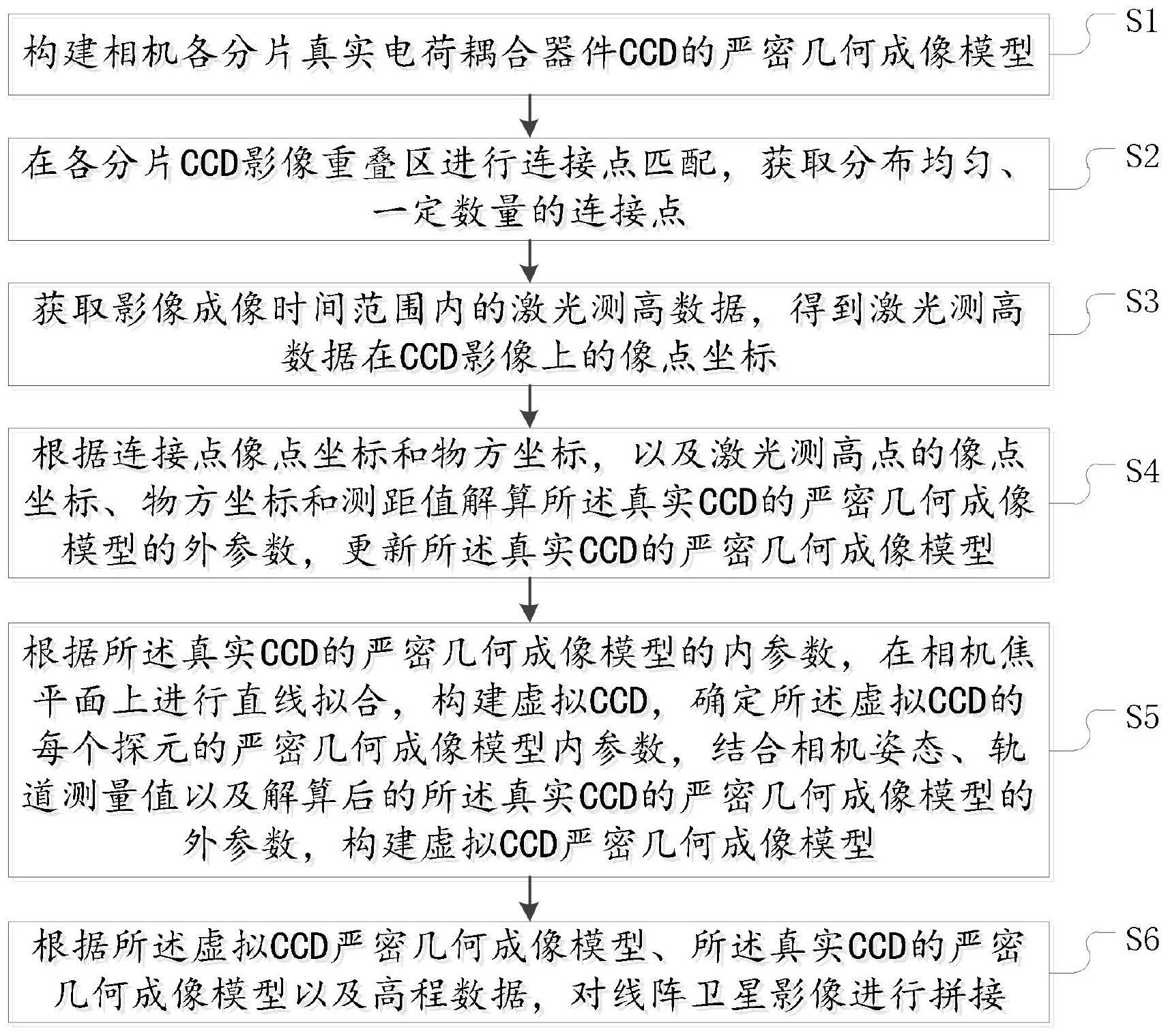
4、构建相机各分片真实电荷耦合器件ccd的严密几何成像模型。
5、在各分片ccd影像重叠区进行连接点匹配,获取分布均匀、一定数量的连接点。
6、获取影像成像时间范围内的激光测高数据,得到激光测高数据在ccd影像上的像点坐标。
7、根据连接点像点坐标和物方坐标,以及激光测高点的像点坐标、物方坐标和测距值解算所述真实ccd的严密几何成像模型的外参数,更新所述真实ccd的严密几何成像模型。
8、根据所述真实ccd的严密几何成像模型的内参数,在相机焦平面上进行直线拟合,构建虚拟ccd,确定所述虚拟ccd的每个探元的严密几何成像模型内参数,结合相机姿态、轨道测量值以及解算后的所述真实ccd的严密几何成像模型的外参数,构建虚拟ccd严密几何成像模型。
9、根据所述虚拟ccd严密几何成像模型、所述真实ccd的严密几何成像模型以及高程数据,对线阵卫星影像进行拼接。
10、可选的,所述根据连接点像点坐标和物方坐标,以及激光测高点的像点坐标、物方坐标和测距值解算所述真实ccd的严密几何成像模型的外参数,更新所述真实ccd的严密几何成像模型,包括:
11、分别对所述真实ccd的严密几何成像模型外参数、连接点和激光测高点物方坐标构建误差方程。
12、根据激光测高点的测距信息,对激光测高点构建距离误差方程。
13、对前两个步骤构建的误差方程进行法化,利用最小二乘法求解真实ccd的严密几何成像模型外参数和连接点、激光测高点物方坐标改正数。
14、根据改正数更新几何成像模型外参数和连接点以及激光测高点物方坐标,重复以上步骤直至迭代结束,得到最终真实ccd的严密几何成像模型。
15、可选的,所述ccd的严密几何成像模型为:
16、
17、其中,(x,y,z)t是影像点在地面物方坐标系下的物方坐标,(xs,ys,zs)t是卫星本体坐标系中心在地面物方坐标系的物方坐标,m是成像比例系数,是卫星本体坐标系到j2000惯性坐标系的转换矩阵,是j2000惯性坐标系到物方坐标系的转换矩阵;(ψx,ψy)是影像探元的指向角,为影像成像严密几何模型内参数,代表了影像内部精度,ru是影像成像严密几何模型外参数构成的矩阵,代表了影像的外部精度;
18、严密几何成像模型外参数矩阵ru由公式(2)确定,具体形式如下:
19、
20、其中,ω,κ分别是围绕y,x,z轴旋转角;
21、所述分别对真实成像ccd严密几何模型中的外参数、连接点和激光测高点物方坐标构建误差方程,得到公式(3):
22、
23、将公式(3)写成矩阵形式为:
24、v1=at+b1x-l1,p1 (4)
25、其中,v1=(vx vy)t是观测值投影误差,是影像严密几何成像模型外参数改正数,x=(δx δy δz)t是激光测高点或连接点地面物方坐标改正数,a,b1为相应的改正数系数矩阵,l1和p1分别是初值计算常量和权矩阵。
26、可选的,所述激光测高点的测距信息的测距方程为:
27、
28、其中,(x,′y′,z′)t是激光测高点在地面物方坐标系下的物方坐标,(xs,ys,zs)t是卫星本体坐标系中心在地面物方坐标系的物方坐标,ρ是激光测高点的精确测距值;
29、所述根据激光测高点的测距信息,对激光测高点构建距离误差方程(6):
30、
31、将公式(6)写成矩阵形式为:
32、v2=b2x-l2,p2 (7)
33、其中,v2=vlas是激光测高点距离误差值,x=(δxδyδz)t是激光测高点地面物方坐标改正数,b2为相应的改正数系数矩阵,l2和p2分别是初值计算常量和权矩阵。
34、可选的,所述对前两步骤构建的误差方程进行法化,利用最小二乘法求解真实ccd的严密几何成像模型外参数和连接点、激光测高点物方坐标改正数之前,结合所述连接点和激光测高点误差方程公式(4)和所述激光测高点的距离误差方程公式(7)构建整体误差方程:
35、v=at+bx-l,p (8)
36、式中,v=(v1 v2)t表示观测值残差向量,a,b为相应的改正数系数矩阵,l和p分别是初值计算常量和权矩阵,x是连接点和激光测高点物方坐标改正数。
37、可选的,所述获取影像成像时间范围内的激光测高数据,得到激光测高数据在ccd影像上的像点坐标,包括:
38、将激光测高点物方坐标代入构建的所述真实ccd的严密几何模型中,得到激光测高点在各分片ccd影像上的概略像点坐标。
39、将所述得到的激光测高点在ccd影像上的概略像点坐标与足印影像中的激光测高点像点坐标,在足印大小范围内进行定点匹配,得到激光测高点在ccd影像上的精确像点坐标。
40、可选的,所述获取影像成像时间范围内的激光测高数据,得到激光测高数据在ccd影像上的像点坐标,还包括:
41、如果定点匹配失败,则在足印大小范围内对足印影像和ccd影像进行同名点匹配,建立ccd影像与足印影像的映射关系,代入激光测高点在足印影像上的像点坐标,得到激光测高点在ccd影像上的精确像点坐标。
42、可选的,所述ccd影像与足印影像的映射关系式为:
43、
44、其中,(x’,y’)是激光测高点在各分片ccd影像上的像点坐标,(x,y)是激光点足印影像像点坐标,(a0,a1,a2,b0,b1,b2)分别是各分片ccd影像与足印影像像点坐标的映射关系系数。
45、可选的,所述根据所述虚拟ccd严密几何成像模型、所述真实ccd的严密几何成像模型以及高程数据,对线阵卫星影像进行拼接,包括:
46、确定虚拟ccd影像上每一个像元在各分片真实ccd影像上的位置,将该位置周围像元的灰度值内插给虚拟ccd影像,重复内插直至得到所有虚拟ccd影像的灰度值,完成拼接。
47、本公开实施例的另一方面提供了一种激光测高数据辅助的卫星线阵影像拼接系统,所述系统包括:
48、第一构建模块,用于构建相机各分片真实电荷耦合器件ccd的严密几何成像模型。
49、匹配模块,用于在各分片ccd影像重叠区进行连接点匹配,获取分布均匀、一定数量的连接点。
50、获取模块,用于获取影像成像时间范围内的激光测高数据,得到激光测高数据在ccd影像上的像点坐标。
51、解算模块,用于根据连接点像点坐标和物方坐标,以及激光测高点的像点坐标、物方坐标和测距值解算所述真实ccd的严密几何成像模型的外参数,更新所述真实ccd的严密几何成像模型。
52、第二构建模块,用于根据所述真实ccd的严密几何成像模型的内参数,在相机焦平面上进行直线拟合,构建虚拟ccd,确定所述虚拟ccd的每个探元的严密几何成像模型内参数,结合相机姿态、轨道测量值以及解算后的所述真实ccd的严密几何成像模型的外参数,构建虚拟ccd严密几何成像模型。
53、拼接模块,用于根据所述虚拟ccd严密几何成像模型、所述真实ccd的严密几何成像模型以及高程数据,对线阵卫星影像进行拼接。
54、本公开实施例的有益效果是:
55、本公开实施例的激光测高数据辅助的卫星线阵影像拼接方法,借助激光测高数据较高精度的测距值,在影像拼接过程中加以约束,能够较好的提高影像几何成像模型中的外参数精度,以此提高拼接影像的几何定位精度。
- 还没有人留言评论。精彩留言会获得点赞!