一种多雷达目标位置同步方法、装置、设备及存储介质与流程
本技术涉及传感器标定,特别是涉及一种多雷达目标位置同步方法、装置、设备及存储介质。
背景技术:
1、作为可以弥补视觉方案环境依赖度高、算力需求大等不足的雷达传感器,往往可以应用在多类型场景中,对于多数车载雷达的应用场景,车辆会搭载多台毫米波雷达。但是每台雷达采集到的点云数据处在各自的坐标系中,必须要将所有雷达的点云数据转换到同一坐标系下才能进行进一步的应用。
2、现有的多雷达坐标系转换的方式是通过测量工具如卷尺、角度尺等进行度量,获取各雷达之间的距离、角度差才可获得转换矩阵。这样的方式费时费力,且由于车身轮廓并不平整、安装位置各不相同,难以获得精确的转换矩阵。或,通过转换矩阵进行多雷达标定的方法中,无法精准将各雷达坐标系下的同一个目标一一对应。
技术实现思路
1、基于上述问题,本技术提供了一种多雷达目标位置同步方法、装置、设备及存储介质,仅通过角反射器的设置,结合特定的坐标转换逻辑,就能够便捷地获得精确的转换矩阵,实现多雷达标定的目的。
2、本技术实施例公开了如下技术方案:
3、本技术第一方面提供一种多雷达目标位置同步方法,该方法包括:
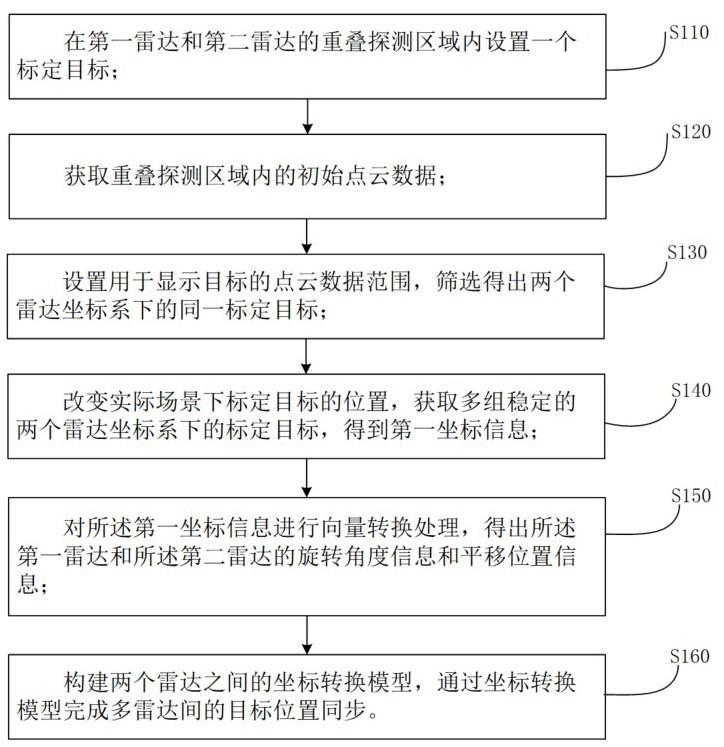
4、在第一雷达和第二雷达的重叠探测区域内设置一个探测目标;
5、获取重叠探测区域内的初始点云数据;
6、设置用于显示目标的点云数据范围,筛选得出两个雷达坐标系下的同一探测目标;
7、多次改变实际场景下探测目标的位置,获取多组稳定的两个雷达坐标系下的探测目标,得到第一坐标信息;
8、对所述第一坐标信息进行向量转换处理,得出所述第一雷达和所述第二雷达的旋转信息和平移位置信息;
9、构建两个雷达之间的坐标转换模型,通过坐标转换模型完成两两雷达间的目标位置同步,从而完成多雷达间的目标位置同步。
10、在一个可能的实现方式中,所述设置用于显示目标的点云数据范围包括:
11、首先需确保第一雷达和第二雷达的探测区域空旷,无障碍物;
12、设置雷达的最大探测半径,去除所述第一雷达和所述第二雷达最大探测半径范围之外的初始点云数据;
13、所述最大探测半径的设置需确保所述第一雷达和所述第二雷达存在重叠探测区域;
14、去除或保留所述第一雷达和所述第二雷达重叠探测区域外的初始点云数据;
15、得到用于显示目标的点云数据范围。
16、在一个可能的实现方式中,所述筛选得出两个雷达坐标系下的同一探测目标,包括:
17、将所述第一雷达和所述第二雷达重叠探测区域内的点云数据进行过滤,每个雷达坐标系下只保留雷达散射截面值最大的一个点云数据分别显示;
18、确保角反射器置于实际场景最大探测半径内两个雷达的重叠区域中,两个雷达坐标系中显示的点云目标位置稳定时的位置坐标即为角反射器分别在两个雷达坐标系中的位置坐标,得到;
19、。
20、由于角反射器的雷达散射截面积远大于一般的目标,即为角反射器分别在所述第一雷达和所述第二雷达雷达坐标系中的位置坐标。
21、在一个可能的实现方式中,所述第一坐标信息的获取包括:
22、多次改变角反射器位置,获取多组稳定的两个雷达坐标系下的探测目标矩阵:
23、第一雷达的点云坐标矩阵:
24、;
25、第二雷达的点云坐标矩阵:
26、;
27、分别记录两个雷达坐标系下各探测目标的位置坐标,得到所述第一坐标信息。
28、在一个可能的实现方式中,所述将第一坐标信息转换为向量信息,得出所述第一雷达和所述第二雷达的相对位置关系,包括:
29、将所述第一坐标信息转换为向量信息:
30、第一雷达:;
31、第二雷达:;
32、计算各雷达坐标系下多个探测目标的中心向量信息,取均值,得到各雷达坐标系下多个探测目标整体的中心点:
33、;
34、此处所述各雷达坐标系下多个探测目标整体是将各雷达坐标系下多个探测目标的点云数据视作一个共同整体,得到这个共同整体的中心点;
35、令,
36、其中,表示第一雷达和第二雷达坐标系下的第二坐标信息;
37、即:
38、令各雷达坐标系下多个探测目标整体的中心点处于各雷达坐标系的原点位置,得到第二坐标信息;此处的第二坐标信息包含将中心点作为原点后的各雷达坐标系下探测目标的位置坐标信息;
39、在所述第二坐标信息的基础上,利用向量点乘公式,求取第一雷达坐标系下多个探测目标与第二雷达坐标系下多个探测目标的偏移夹角,求取均值,得到旋转角度信息:
40、。
41、在一个可能的实现方式中,所述旋转角度信息得到后,需进一步确认旋转方向:
42、将所述第一雷达或所述第二雷达的第二坐标信息顺时针旋转所述旋转角度信息,计算度量两组坐标重合程度的第一损失函数:
43、;
44、将所述第一雷达或所述第二雷达的第二坐标信息逆时针旋转所述旋转角度信息,计算度量两组坐标重合程度的第二损失函数:
45、;
46、比较所述第一损失函数和所述第二损失函数的值,若所述第一损失函数值小于所述第二损失函数值,则旋转方向确认为顺时针;
47、若所述第一损失函数值大于所述第二损失函数值,则旋转方向确认为逆时针。
48、在一个可能的实现方式中,所述平移位置信息的获取步骤如下:
49、获取旋转角度信息和旋转方向信息;
50、将所述第一雷达或所述第二雷达的第一坐标信息进行旋转,得到第三坐标信息,计算所述第三坐标信息与另一台雷达第一坐标信息的向量差,取均值,得到所述平移位置信息。
51、在一个可能的实现方式中,所述构建两个雷达之间的坐标转换模型,包括:
52、构建将第一雷达的点云坐标矩阵转换到第二雷达坐标系下的旋转矩阵:
53、;
54、通过旋转矩阵及所求旋转角度信息和旋转方向,获取旋转后的第一雷达的坐标信息;
55、构建平移矩阵,将旋转后的第一雷达的坐标信息带入所述平移矩阵:
56、;
57、其中,为第一雷达中的探测目标坐标点,为第二雷达中的与表示同一探测目标的坐标点;
58、旋转矩阵与平移矩阵组成将第一雷达的点云坐标转换到第二雷达坐标系下的转换矩阵。
59、使用所述转换矩阵将第一雷达的点云坐标转换到第二雷达坐标系下:
60、;
61、然后使用所述转换矩阵将第二雷达的点云坐标转换到第三雷达坐标系下:
62、;
63、其中,为第三雷达的点云坐标矩阵;为将第二雷达的点云坐标转换到第三雷达坐标系下的旋转矩阵;为将第二雷达的点云坐标转换到第三雷达坐标系下的平移矩阵;
64、完成多雷达之间的坐标信息转换。
65、本技术第二方面提供一种多雷达目标位置同步装置,包括:
66、点云数据获取单元,获取第一雷达和第二雷达重叠探测区域内的初始点云数据,确保重叠探测区域内设置一个探测目标;
67、点云数据筛选单元,设置用于显示目标的点云数据范围,筛选得出两个雷达坐标系下的同一探测目标;
68、第一坐标信息获取单元,多次改变实际场景下探测目标的位置,获取多组稳定的两个雷达坐标系下的探测目标,得到第一坐标信息;
69、位置转换信息获取单元,所述位置转换信息包括所述第一雷达和所述第二雷达的旋转角度信息和平移位置信息,对所述第一坐标信息进行向量转换处理,得出所述第一雷达和所述第二雷达的旋转角度信息和平移位置信息;
70、坐标转换模型构建单元,构建两个雷达之间的坐标转换模型,通过坐标转换模型完成多雷达标定。
71、本技术第三方面提供一种多雷达目标位置同步设备,包括:存储器,处理器,及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现如本技术第一方面所述的多雷达目标位置同步方法。
72、本技术第四方面提供一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当所述指令在终端设备上运行时,使得所述终端设备执行如本技术第一方面所述的多雷达目标位置同步方法。
73、相较于现有技术,本技术具有以下有益效果:
74、本技术利用雷达散射截面积(radar cross section, rcs)过滤和屏蔽区过滤,使探测目标角反射器在雷达中的位置更容易获得,方便定位;
75、本技术通过同步显示的方式,使同一探测目标角反射器在不同雷达中的位置同步显示,方便记录对应坐标组;
76、本技术选用多组探测目标角反射器的坐标数据进行标定,极大地减少了误差;
77、本技术仅需要通过角反射器即可便捷地获得精确的转换矩阵,节省了算力成本,提高标定效率。
78、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!