无接触室内多目标追踪方法、系统、存储介质及计算设备
本发明涉及一种多目标追踪,特别是关于一种无接触室内多目标追踪方法、系统、存储介质及计算设备。
背景技术:
1、了解人在室内的活动位置和行动轨迹对于实现智能家居、室内导航、安防监控、灾害管理和智慧医疗等多种应用场景都十分重要。近年来,研究人员提出了许多基于无线射频信号的无接触式室内定位和追踪技术,这些技术不需要感知目标携带任何设备,具有非侵扰的优势,主要包括wifi、蓝牙、调频连续波(fmcw)和脉冲超宽带(ir-uwb)等。与其他低频的射频技术相比,毫米波段的fmcw雷达工作频段更高、波长更短,具有较大的带宽和较多的天线数量。因此,毫米波fmcw雷达(又称毫米波雷达)具有较高的空间分辨率,能够精确感知不同目标的距离和角度信息,是实现多目标轨迹追踪的理想手段。
2、现有基于毫米波雷达的多目标追踪系统大多应用于室外空旷场景,聚焦于对车辆等目标的追踪。相较于室外场景,室内场景的空间通常相对狭小,存在大量静态物体,多径效应更加显著。在多径效应显著的室内场景中,除了人体的直接反射信号外,雷达还会接收到能量较强的经人体和静态物体多次反射的信号。因此,在雷达接收信号谱中不仅能观察到真实目标(人体),还会观察到由多径传播引起的虚假目标(多径鬼影)。多径鬼影往往会伴随目标运动,表现出与真实目标相似的特征,导致区分虚假目标和真实目标变得非常具有挑战性。考虑到人运动时有可能会暂时遮挡环境中的静态反射物体,物体反射信号的能量变化会导致在反射物体所在位置上出现真实目标的鬼影。这类鬼影被称为目标伪影,它往往会随着目标的移动而移动,同样会使得目标检测结果有误,导致错误的轨迹数量和较大的轨迹追踪误差。除此之外,当人被环境中的静态物体遮挡时,人体反射信号的能量会大大减弱,也会导致真实目标难以被雷达准确检测和识别。因此,精确室内多目标追踪的实现依赖于良好的干扰消除机制,可靠的室内无接触多目标追踪方法有待于被提出。
技术实现思路
1、针对上述问题,本发明的目的是提供一种无接触室内多目标追踪方法、系统、存储介质及计算设备,其能实现以无接触的方式实现对多个运动目标(人体)的精确追踪。
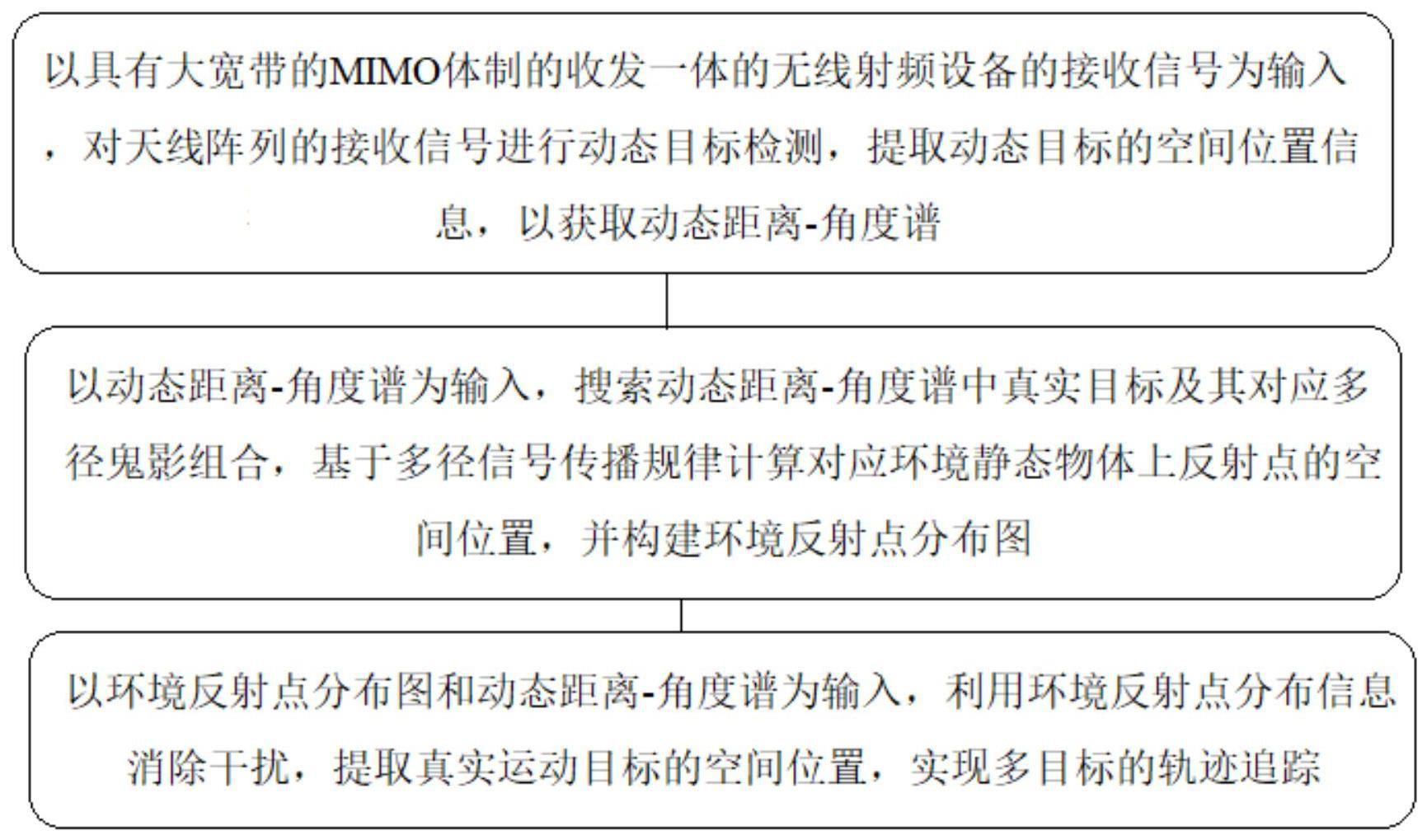
2、为实现上述目的,第一方面,本发明采取的技术方案为:一种无接触室内多目标追踪方法,其包括:以具有大宽带的mimo体制的收发一体的无线射频设备的接收信号为输入,对天线阵列的接收信号进行动态目标检测,提取动态目标的空间位置信息,以获取动态距离-角度谱;以动态距离-角度谱为输入,搜索动态距离-角度谱中真实目标及其对应多径鬼影组合,基于多径信号传播规律计算对应环境静态物体上反射点的空间位置,并构建环境反射点分布图;以环境反射点分布图和动态距离-角度谱为输入,利用环境反射点分布信息消除干扰,提取真实运动目标的空间位置,实现多目标的轨迹追踪。
3、进一步,获取动态距离-角度谱,包括:
4、对设备天线阵列中每对收发天线的接收信号沿快时间维度进行fft得到目标的距离谱信息,将距离谱按照chirp采集的时间顺序依次排列,获得距离-时间谱;
5、对距离-时间谱进行静态消除,以消除静态杂波获得动态反射信息;
6、采用角度估计算法处理多天线对的动态反射信息,获取距离-角度谱;
7、对距离-角度谱进行目标检测操作以提取动态目标相对于设备的空间位置信息,获取动态距离-角度谱。
8、进一步,构建环境反射点分布图,包括:
9、以动态距离-角度谱为输入,基于多径信号传播关系,搜索动态距离-角度谱中真实目标及其对应多径鬼影组合,并计算可能的静态反射点的空间位置;每一时刻都可能根据搜索到的真实目标和多径鬼影组合计算出一个或多个静态反射点;
10、当目标遍历环境中不同空间位置,积累多帧的静态反射点,构建环境反射点分布图。
11、进一步,对积累的多帧的静态反射点进行聚类,并对聚类结果进行线性拟合,包括:
12、对所有估计的静态反射点进行聚类,得到多个簇;
13、如果某个簇中的静态反射点数量和方差都超过了设定阈值,则对该簇进行再次分类,划分为多个子簇;
14、对聚类结果进行线性拟合,将环境反射点分布图映射成静态反射物体的集合,每个静态反射体都对应拟合结果中的一个线段。
15、进一步,多目标的轨迹追踪,包括:
16、根据环境静态反射点和真实目标的空间位置判断真实目标是否被静态反射物体遮挡,若是,则在动态距离-角度谱中对遮挡区域的真实目标进行能量增强;
17、检测并消除多径鬼影;
18、检测并消除目标伪影;
19、将干扰消除后的多目标位置信息进行数据关联,并进行轨迹滤波处理,获得多个真实目标的运动轨迹。
20、进一步,检测并消除多径鬼影,包括:
21、在距离-角度谱中由近及远迭代地定位真实目标并搜索可能与该真实目标对应的多径鬼影组合;
22、如果根据某候选组合计算出的反射点与环境静态反射点分布位置重合或靠近环境静态反射点分布,则该组合被视为有效组合,保留真实目标并消除该组合中的多径鬼影。
23、进一步,检测并消除目标伪影,包括:
24、将估计的环境反射点分布图与距离-角度谱叠加,并在环境反射点分布图的邻域中进行信号能量衰减。
25、第二方面,本发明采取的技术方案为:一种无接触室内多目标追踪系统,其包括:动态距离-角度谱获取模块,以具有大宽带的mimo体制的收发一体的无线射频设备的接收信号为输入,对天线阵列的接收信号进行动态目标检测,提取动态目标的空间位置信息,以获取动态距离-角度谱;环境反射点分布图构建模块,以动态距离-角度谱为输入,搜索动态距离-角度谱中真实目标及其对应多径鬼影组合,基于多径信号传播规律计算对应环境静态物体上反射点的空间位置,并构建环境反射点分布图;追踪模块,以环境反射点分布图和动态距离-角度谱为输入,利用环境反射点分布信息消除干扰,提取真实运动目标的空间位置,实现多目标的轨迹追踪。
26、第三方面,本发明采取的技术方案为:一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行上述实施例中所述方法中的任一方法。
27、第四方面,本发明采取的技术方案为:一种计算设备,其包括:一个或多个处理器、存储器及一个或多个程序,其中一个或多个程序存储在所述存储器中并被配置为所述一个或多个处理器执行,所述一个或多个程序包括用于执行上述方法中的任一方法的指令。
28、本发明由于采取以上技术方案,其具有以下优点:
29、1、本发明采用一个大带宽mimo体制的无线射频设备进行无接触室内多人追踪,无需任何环境先验信息(如环境静态物体空间分布等),无需进行预先数据采集和机器训练。
30、2、本发明考虑了复杂室内环境中干扰对追踪的影响,首先利用多径信号传播规律进行环境反射点分布构建,在目标运动的过程中自动获取环境静态物体上的反射点分布信息,而后将环境反射点分布信息用于辅助干扰消除,提取真实运动目标的空间位置和轨迹,以实现精确的多人追踪。消除的干扰既可以是多径鬼影、目标伪影等虚假动态目标干扰,也可以是由于目标被遮挡引起的能量削弱干扰。
31、3、本发明的环境反射点分布构建模块,可用于获取环境静态物体上的反射点分布信息,指示静态物体的空间分布。不仅适用于辅助室内多目标追踪应用中的干扰信息消除,还适用于活动识别等其它感知应用场景,以辅助实现更加可靠、精确的目标和环境感知。
32、4、本发明不仅适用于毫米波雷达,对其它具有大带宽的mimo体制的无线射频设备(如装有天线阵列的脉冲超宽带雷达)也同样适用,具有适用性强、可靠性高、易部署的特点。
- 还没有人留言评论。精彩留言会获得点赞!