基于MIMO雷达与波束形成的人体生命体征检测方法与流程
本发明涉及生命体征检测,尤其涉及基于mimo雷达与波束形成的人体生命体征检测方法。
背景技术:
1、人体生命体征检测包括测量一系列能显示个人健康状况的生理参数。呼吸和心率等生命体征在定位和管理生命健康问题等方面非常有用。心率测量技术从计数脉冲发展到基于接触的方法,如心电图和光电容积脉搏波描记。目前,低成本和易于集成的毫米波雷达传感器又使得非接触式的微弱生命体征信号检测变得非常有前景。多输入多输出(multiple input multiple output,mimo)雷达是指多个辐射站和接收站。根据分集技术,各接收天线元应接收不同的信息,进而提高系统的整体性能,如链路质量、雷达检测概率或定位精度。从处理的角度来看,mimo雷达允许在接收时通过数字波束形成(dbf)。然而,从心脏的机械行为(即心跳)反射的雷达回波信号是复杂的,并且与其他更强的机械信号(如呼吸、身体运动等)混合在一起,因此雷达回波信号就包含了一些列不同的直接与呼吸和心率模式相关的多普勒频率。
2、现有技术中,采用传统的基于频谱的方法对雷达回波信号进行处理并不能准确估计这些频率,如呼吸信号的谐波和交叉积使得心率信号的鲁棒性检测变得复杂。使用雷达最大回波信号和最大方差的距离选择策略来确定被测者的位置信息,使得雷达的测量稳定性不高。
3、例如公告号为:cn114742117b的发明专利公开的复杂室内场景下毫米波雷达的人体生命体征检测方法,包括:根据样本数据对分类器进行训练;对毫米波雷达回波信号进行adc数据采集,得到采样数据后进行fft处理、静态杂波滤除以及cfar与doa估计,得到点云数据;对点云数据进行多普勒变换与特征提取,滤除运动幅度大的动点;对点云连续n帧的信号提取相位信息,估测呼吸与心跳频率;对连续n帧的点云信号进行特征提取;将提取后的特征输入至分类器中进行预测;输出场景内检测的人体目标呼吸心跳数据
4、例如公告号为:cn111481184b的发明专利公开的基于毫米波雷达技术的多目标呼吸心率监测方法与系统,包括多目标呼吸心率信号分离与心率和呼吸率提取,通过毫米波雷达模块进行无接触的心率和呼吸率的检测,避免了繁琐的接触式监测程序,同时不会冒犯被检测者的隐私,提高了检测精度,大大增强了测量的可靠性。
5、但本技术发明人在实现本技术实施例中发明技术方案的过程中,发现上述技术至少存在如下技术问题:
6、现有技术中,通过传统方法基于频谱对雷达回波信号进行处理会混合其他干扰频率,通过雷达最大回波信号和最大方差的距离选择策略确定生命体征的位置不准确,存在人体生命体征检测准确率低的问题。
技术实现思路
1、本技术实施例通过提供基于mimo雷达与波束形成的人体生命体征检测方法,解决了现有技术中人体生命体征检测准确率低的问题,实现了人体生命体征检测准确率的提高。
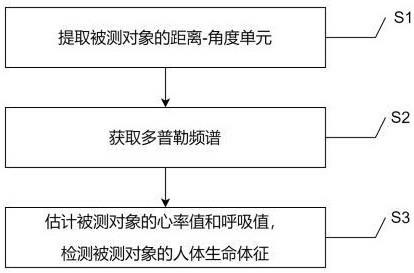
2、本技术实施例提供了基于mimo雷达与波束形成的人体生命体征检测方法,用于服务器,包括以下步骤:s1,mimo雷达的接收站通过预设数量的天线从不同角度和距离以预设时间窗口接收辐射站经对被测对象发射波形后反射回来的初始回波信号,再对初始回波信号进行预处理操作提取被测对象的距离-角度单元;s2,提取被测对象的距离-角度单元的相位信号,再对被测对象的距离-角度单元的相位信号进行解缠绕和差分处理,并结合快速傅里叶变换算法进行快速傅里叶变换处理获取多普勒频谱;s3,分析获取的多普勒频谱,对多普勒频谱进行筛选得到呼吸信号和心率信号,根据得到的呼吸信号和心率信号估计被测对象的心率值和呼吸值,由估计的心率值和呼吸值检测被测对象的人体生命体征,并计算人体生命体征检测效率。
3、进一步的,所述s1中预处理操作,具体步骤如下:s11,静态杂波滤除:根据相量均值相消算法,通过在慢时间维和快时间维上进行平均处理以去除初始回波信号的中频信号,得到回波时域信号;s12,获取距离信息:根据快速傅里叶变换算法,通过对回波时域信号进行距离维快速傅里叶变换将回波时域信号转换为回波频域距离信号,根据回波频域距离信号得到被测对象的距离信息;s13,获取角度信息:根据快速傅里叶变换算法,通过对回波时域信号进行角度维快速傅里叶变换将回波时域信号转换为回波频域角度信号,根据回波频域角度信号得到被测对象的角度信息;s14,收集被测对象的距离-角度单元:通过将被测对象的距离信息和被测对象的角度信息与参考距离信息和参考角度信息进行对比得到目标距离宽度和目标角度宽度,根据目标距离宽度和目标角度宽度设置距离窗口和角度窗口收集被测对象的距离-角度单元。
4、进一步的,所述s2中被测对象的多个距离-角度单元的相位信号的具体提取过程如下:根据天线维快速傅里叶变换的结果通过公式获取回波频域距离信号功率最高的距离单元,再以回波频域距离信号功率最高的距离单元为中心选择回波频域距离信号最小的距离单元和最大的距离单元;结合回波频域距离信号最小的距离单元和最大的距离单元通过公式获取回波频域角度信号功率最高的角度单元,再以回波频域角度信号功率最高的角度单元为中心选择回波频域角度信号最小的角度单元和最大的角度单元,由此得到经距离维快速傅里叶变换和角度维快速傅里叶变换后的距离为v、角度为u和时间窗口为m的回波信号;提取回波信号的慢时间维信号,再提取慢时间维信号的相位信号。
5、进一步的,所述回波频域距离信号最小的距离单元和最大的距离单元的具体获取过程如下:以v表示距离单元的索引,表示经距离维快速傅里叶变换和角度维快速傅里叶变换后的距离为v、角度为u和时间窗口为m的回波频域距离信号,根据功率值通过公式获取功率最高的距离单元,具体计算公式为:
6、,其中m为时间窗口的最大值,为天线维快速傅里叶变换的点数;对以为中心的个距离单元进行选择,得到最小的距离单元索引和最大的距离单元索引。
7、进一步的,所述回波频域角度信号的最小角度单元和最大角度单元的具体获取过程如下:以u表示角度单元的索引,表示经距离维快速傅里叶变换和角度维快速傅里叶变换后的距离为v、角度为u和时间窗口为m的回波频域角度信号,根据功率值通过公式选择功率最高的角度单元,具体计算公式为:
8、;对以为中心的个距离单元进行选择,得到最小的角度单元索引和最大的角度单元索引。
9、进一步的,所述被测对象的呼吸值的具体估计过程如下:s311,通过在预设呼吸频率范围内选择多普勒频谱的最大值位置,计算被测对象的各距离-角度单元的呼吸估计值,由各距离-角度单元的呼吸估计值得到呼吸矩阵r;s312,根据记录的呼吸矩阵r中呼吸估计值和该呼吸估计值出现的频次构建呼吸伪谱,则呼吸伪谱中出现频次最高的呼吸估计值为被测对象的呼吸值。
10、进一步的,所述被测对象的心率值的具体估计过程如下:s321,通过在预设心率频率范围内选择多普勒频谱的最大值位置,计算被测对象的各距离-角度单元的心率估计值,由各距离-角度单元的心率估计值得到心率矩阵h;s322,判断心率矩阵h中各心率估计值与呼吸矩阵r中的呼吸估计值是否具有倍数关系:如果心率估计值与呼吸矩阵r中的呼吸估计值有倍数关系,则忽略该心率估计值,继续判断下一心率估计值;如果心率估计值与呼吸矩阵r中的呼吸估计值没有倍数关系,则执行s323;s323,记录心率估计值与呼吸矩阵r中的呼吸估计值没有倍数关系时的心率估计值和该心率估计值出现的频次,根据记录的心率矩阵h中的心率估计值和该心率估计值出现的频次构建心率伪谱;s324,获取心率伪谱中出现频次最高的心率估计值,判断该心率估计值是否小于预设心率:如果该心率估计值小于预设心率,则该心率估计值为被测对象的心率值;如果该心率估计值不小于预设心率,则执行s325;s325,通过心率谐波积谱重新生成参考心率伪谱并获取参考心率伪谱中出现频次最高的参考心率估计值,再执行s324,直到获得被测对象的心率值。
11、进一步的,所述心率谐波积谱的具体构建过程如下:根据离散傅里叶变换算法,对心率伪谱进行离散傅里叶变换处理后再抽取心率估计值相乘得到心率谐波积谱,心率谐波积谱的具体计算公式为:,其中,q为抽取幅度谱的抽取率,,q为预设谐波数,f为心率频率。
12、进一步的,所述生成参考心率伪谱并获取参考心率伪谱中出现频次最高的参考心率估计值,具体过程如下:所述参考心率伪谱的具体生成过程为:通过在预设心率频率范围内选择心率谐波积谱的最大值位置,计算被测对象的各距离-角度单元的参考心率估计值,由各距离-角度单元的参考心率估计值得到抽取率q的心率谐波积谱的参考心率矩阵;判断参考心率矩阵中各参考心率估计值与呼吸矩阵r中的呼吸估计值是否具有倍数关系:如果参考心率估计值与呼吸矩阵r中的呼吸估计值有倍数关系,则忽略该参考心率估计值,继续判断下一参考心率估计值,否则记录该参考心率估计值和该参考心率估计值出现的频次;根据记录的参考心率矩阵中的参考心率估计值和该参考心率估计值出现的频次构建参考心率伪谱;所述参考心率伪谱中出现频次最高的参考心率估计值的具体获取过程如下:对心率谐波积谱进行分析,在预设心率频率范围内通过公式获取心率谐波积谱中出现频次最高的参考心率估计值,参考心率估计值的具体计算公式为:。
13、进一步的,所述人体生命体征检测效率的具体计算过程如下:根据计算单个距离单元与功率最高的距离单元的距离所用的时间和计算单个角度单元与功率最高的角度单元的距离所用的时间时间,结合距离单元的个数和角度单元的个数得到获得回波信号的时间,获得回波信号的参考时间为;获取提取被测对象的距离-角度单元的时间和回波信号的后处理时间,对应的参考时间分别为和;通过公式计算人体生命体征检测效率dp,具体计算公式为:
14、,其中e为自然常数,和分别为距离单元和角度单元的个数得到获得回波信号的时间的修正因子与回波信号的后处理和提取被测对象的距离-角度单元的总时间的修正因子。
15、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
16、1、通过对接收的初始回波信号的预处理得到被测对象的距离-角度单元,然后提取被测对象的距离-角度单元的相位信号并进行解缠绕、差分处理和快速傅里叶变换得到多普勒频谱,接着筛选多普勒频谱得到呼吸信号和心率信号,在预设呼吸频率范围和预设心率范围内分别构建呼吸伪谱和心率伪谱,由呼吸伪谱获取被测对象的呼吸值,最后结合心率谐波积谱生成的参考心率伪谱获取被测对象的心率值,根据被测对象的呼吸值和心率值检测生命体征,从而实现了人体生命体征的准确检测,进而实现了人体生命体征检测准确率的提高,有效解决了现有技术中人体生命体征检测准确率低的问题;
17、2、通过对接收的初始回波信号在慢时间维和快时间维上的平均处理得到回波时域信号,然后结合距离维快速傅里叶变换处理得到被测对象的距离信息,接着结合角度维快速傅里叶变换处理得到被测对象的角度信息,再根据与参考距离信息和角度信息的比对结果设置距离窗口和角度窗口获取被测对象的多个距离-角度单元,根据对提取的距离-角度单元进行处理得到被测对象的呼吸值和心率值,从而实现了人体生命体征的稳定检测,进而实现了人体生命体征检测稳定性的提高;
18、3、通过天线维快速傅里叶变换的点数得到回波频域距离信号最小的距离单元和最大的距离单元,然后结合获取的回波频域距离信号最小的距离单元和最大的距离单元得到回波频域角度信号的最小角度单元和最大角度单元,从而得到经距离维快速傅里叶变换和角度维快速傅里叶变换后的回波信号,再通过提取的回波信号的慢时间维信号进一步得到对应的相位信号并进行处理得到多普勒频谱,最后通过对多普勒频谱的分析获得被测对象的心率值和呼吸值,从而实现了人体生命体征的快速检测,进而实现了人体生命体征检测效率的提高。
- 还没有人留言评论。精彩留言会获得点赞!