激光雷达系统和方法与流程
本公开总体上涉及用于扫描周围环境的勘测技术,并且更具体地,涉及使用激光雷达(lidar)技术来检测周围环境中的物体的系统和方法。
背景技术:
1、随着驾驶员辅助系统和自主车辆的出现,汽车需要配备有能够可靠地感测和解释其周围环境的系统,包括识别可能会影响车辆导航的障碍物、危险、物体和其它物理参数。为此,已经提出了多种不同的技术,包括单独或以冗余方式操作的雷达、激光雷达、基于相机的系统。
2、驾驶员辅助系统和自主车辆的一个考虑因素是系统在不同条件下(包括雨、雾、黑暗、强光和雪)确定周围环境的能力。光检测和测距系统(激光雷达(lidar),也称为光雷达(ladar))是可以在不同条件下很好地工作的技术的示例,该技术通过用光照亮物体并用传感器测量反射脉冲,来测量到物体的距离。激光是可以在激光雷达系统中使用的光源的一个示例。与任何传感系统一样,为了使基于激光雷达的感测系统完全被汽车行业采用,系统应当提供可靠的数据,以使得能够检测远处的物体。然而,目前激光雷达系统的最大照明功率受到使激光雷达系统对眼睛安全的需要的限制(即,使得它们将不会损伤人眼,这种损伤会在投射的光发射在眼睛的角膜和晶状体中吸收时发生,而对视网膜造成热损伤。)
3、本公开的系统和方法针对在遵守眼睛安全规定的同时改进激光雷达系统的性能。
技术实现思路
1、与本公开一致的实施例提供了使用激光雷达技术来检测周围环境中的物体的系统和方法。
2、与所公开的实施例一致,激光雷达系统包括至少一个处理器,该处理器被配置为:控制至少一个光源的激活以照亮视场;从具有多个检测元件的至少一个传感器接收反射信号,该反射信号指示从视场中的物体反射的光;动态地分配多个检测元件的第一子集以构成第一像素;动态地分配多个检测元件的第二子集以构成第二像素;在处理第一像素和第二像素之后,动态地分配多个检测元件的第三子集以构成第三像素,第三子集与第一子集和第二子集中的至少一个重叠,并且不同于第一子集和第二子集中的每一个;以及在处理第一像素和第二像素之后,动态地分配多个检测元件的第四子集以构成第四像素,第四子集与第一子集、第二子集和第三子集中的至少一个重叠,并且不同于第一子集、第二子集和第三子集中的每一个。
3、与所公开的实施例一致,车辆包括主体;以及主体内的至少一个处理器,该处理器被配置为:控制至少一个光源的激活以照亮主体前方的视场;从具有多个检测元件的至少一个传感器接收反射信号,该反射信号指示从视场中的物体反射的光;动态地分配多个检测元件的第一子集以构成第一像素;动态地分配多个检测元件的第二子集以构成第二像素;在处理第一像素和第二像素之后,动态地分配多个检测元件的第三子集以构成第三像素,第三子集与第一子集和第二子集中的至少一个重叠,并且不同于第一子集和第二子集中的每一个;以及在处理第一像素和第二像素之后,动态地分配多个检测元件的第四子集以构成第四像素,第四子集与第一子集、第二子集和第三子集中的至少一个重叠,并且不同于第一子集、第二子集和第三子集中的每一个。
4、与所公开的实施例一致,一种方法从激光雷达系统的传感器获得数据。该方法包括控制至少一个光源的激活以照亮视场;从具有多个检测元件的至少一个传感器接收反射信号,该反射信号指示从视场中的物体反射的光;动态地分配多个检测元件的第一子集以构成第一像素;动态地分配多个检测元件的第二子集以构成第二像素;在处理第一像素和第二像素之后,动态地分配多个检测元件的第三子集以构成第三像素,第三子集与第一子集和第二子集中的至少一个重叠,并且不同于第一子集和第二子集中的每一个;以及在处理第一像素和第二像素之后,动态地分配多个检测元件的第四子集以构成第四像素,第四子集与第一子集、第二子集和第三子集中的至少一个重叠,并且不同于第一子集、第二子集和第三子集中的每一个。
5、与所公开的实施例一致,激光雷达系统包括至少一个处理器,该处理器被配置为:控制至少一个光源的激活以照亮至少10平方度的视场(fov)部分;从具有多个检测元件的至少一个传感器接收反射信号,该反射信号指示从fov部分中的物体反射的光;动态地为多个检测元件应用第一分组方案,以提供包括第一数量的组的多个第一检测元件组;从至少一个传感器获得多个第一输出信号,第一输出信号中的每一个与另一个第一检测元件组对应;处理多个第一输出信号以提供遍及fov部分具有第一点密度的第一点云,其中第一点云的每个点与另一个第一检测元件组对应;动态地为多个检测元件应用第二分组方案,以提供包括第二数量的组的多个第二检测元件组,其中第二数量大于第一数量;从至少一个传感器获得多个第二输出信号,第二输出信号中的每一个与另一个第二检测元件组对应;以及处理多个第二输出信号以提供遍及fov部分具有第二点密度的第二点云,其中第二点云的每个点与另一个第二检测元件组对应;其中第二点密度至少是第一点密度的两倍密集。
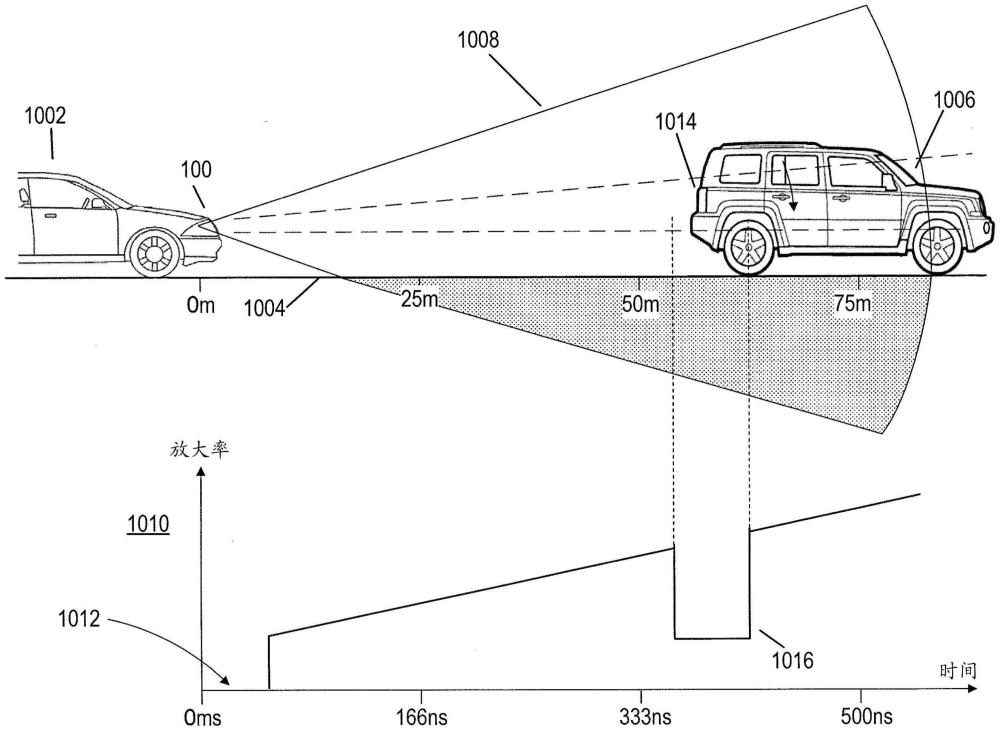
6、与所公开的实施例一致,激光雷达系统包括至少一个处理器,该处理器被配置为:控制至少一个光源的激活以照亮视场;从至少一个传感器接收与视场中的物体相关联的反射信号,其中,光离开至少一个光源与反射照射在至少一个传感器上之间的时间流逝构成飞行时间;以及在飞行时间期间更改与至少一个传感器相关联的放大参数。
7、与所公开的实施例一致,激光雷达方法包括控制至少一个光源的激活以照亮视场;从至少一个传感器接收与视场中的物体相关联的反射信号,其中,光离开至少一个光源与反射照射在至少一个传感器上之间的时间流逝构成飞行时间;以及在飞行时间期间更改与至少一个传感器相关联的放大参数。
8、与所公开的实施例一致,车辆包括主体;位于主体内的至少一个处理器,并被配置为:控制至少一个光源的激活以照亮主体前方的视场;从至少一个传感器接收与视场中的物体相关联的反射信号,其中,光离开至少一个光源与反射照射在至少一个传感器上之间的时间流逝构成飞行时间;以及在飞行时间期间更改与至少一个传感器相关联的放大参数。
9、与所公开的实施例一致,激光雷达系统包括至少一个处理器,该处理器被配置为:控制至少一个光源的激活以发射指向视场的第一光发射;从处于第一放大设置的至少一个传感器接收与第一光发射从视场中的一个或多个物体的一个或多个反射相关联的数据;控制至少一个光源的激活以发射指向视场的第二光发射;将与至少一个传感器相关联的放大设置更改为与第一放大设置不同的第二放大设置;从处于第二放大设置的至少一个传感器接收与第二光发射从视场中的一个或多个物体的一个或多个反射相关联的数据;以及基于对与第一光发射的一个或多个反射相关联的数据和与第二光发射的一个或多个反射相关联的数据的分析,确定到视场中的物体的距离。
10、与所公开的实施例一致,用于确定到物体的距离的激光雷达方法包括发射指向视场的第一光发射;从处于第一放大设置的至少一个传感器接收与第一光发射从视场中的一个或多个物体的一个或多个反射相关联的数据;发射指向视场的第二光发射;将与至少一个传感器相关联的放大设置更改为与第一放大设置不同的第二放大设置;从处于第二放大设置的至少一个传感器接收与第二光发射从视场中的一个或多个物体的一个或多个反射相关联的数据;以及通过分析与第一光发射的一个或多个反射相关联的数据和与第二光发射的一个或多个反射相关联的数据来确定到视场中的物体的距离。
11、与所公开的实施例一致,激光雷达系统包括至少一个处理器,该处理器被配置为:访问存储在存储器中的光学预算,该光学预算与至少一个光源相关联并且定义在预定时间段中可由至少一个光源发射的光量;接收指示激光雷达系统的平台条件的信息;基于接收到的信息,基于扫描速率、扫描模式、扫描角度、空间光分布和时间光分布中的至少两个,将光学预算动态地分摊到激光雷达系统的视场;以及根据动态地分摊的光学预算输出信号,用于以使得光通量能够在对视场进行扫描时变化的方式控制至少一个光源。该至少一个处理器还被配置为:控制至少一个光源的激活以照亮视场;从具有多个检测元件的至少一个传感器接收反射信号,该反射信号指示从视场中的物体反射的光;动态地分配多个检测元件的第一子集以构成第一像素;动态地分配多个检测元件的第二子集以构成第二像素;在处理第一像素和第二像素之后,动态地分配多个检测元件的第三子集以构成第三像素,第三子集与第一子集和第二子集中的至少一个重叠,并且不同于第一子集和第二子集中的每一个;以及在处理第一像素和第二像素之后,动态地分配多个检测元件的第四子集以构成第四像素,第四子集与第一子集、第二子集和第三子集中的至少一个重叠,并且不同于第一子集、第二子集和第三子集中的每一个。
12、与其它公开的实施例一致,方法可以包括上述任何处理器执行的步骤的一个或多个步骤和/或包括本文描述的任何步骤。
13、与其它公开的实施例一致,非暂时性计算机可读存储介质可以存储程序指令,该程序指令由至少一个处理设备执行并执行本文描述的任何方法。
14、前面的一般性描述和以下的详细描述仅仅是示例性和解释性的,并不是对权利要求的限制。
- 还没有人留言评论。精彩留言会获得点赞!