一种汽车部件快速智能检测方法及系统与流程
本发明涉及汽车检测,具体来说,特别涉及一种汽车部件快速智能检测方法及系统。
背景技术:
1、在现代社会,汽车已经成为家庭出行的主要交通工具,其安全性能也受到了广大用户的高度关注。随着汽车工业的发展,人们越来越认识到零部件的性能和质量是决定整车性能和质量的最重要的因素之一。面对市场竞争的加剧和消费者对产品质量的更高期待,制造商和零部件供应商必须尽力减少不合格零部件的出现。这就需要他们采用更加高效和可靠的检测手段来保证汽车零部件的质量。
2、机器视觉系统的基本特点是提高生产的灵活性和自动化水平。在一些危险的工作环境或人工视觉难以满足要求的地方,常常使用机器视觉来替代人工视觉。随着技术的不断发展,机器视觉在汽车零部件检测方面的应用越来越广泛,用于检测零部件是否存在缺陷。然而,目前,通过机器视觉对汽车部件进行检测时,往往只能对零部件的缺陷进行有效检测,但对一些缺陷来说,很难对缺陷的大小进行精确识别,而对于一些缺陷来说是可以进行修复完成的,若无法识别出可修复的缺陷,则会导致这些存在可修复缺陷的零部件被错误地判定为不合格,从而浪费了修复这些缺陷的机会和成本。
3、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、有鉴于此,针对相关技术中的问题,本发明提供一种汽车部件快速智能检测方法及系统,以解决上述提及的无法识别出可修复的缺陷会导致这些存在可修复缺陷的零部件被错误地判定为不合格,从而浪费了修复这些缺陷的机会和成本的问题。
2、为了解决上述问题,本发明采用的具体技术方案如下:
3、根据本发明的一个方面,提供了一种汽车部件快速智能检测方法,该智能检测方法包括以下步骤:
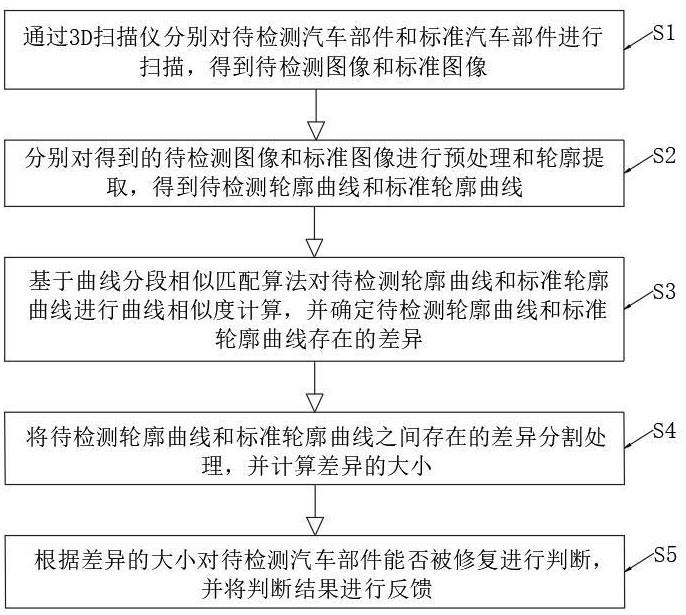
4、s1、通过3d扫描仪分别对待检测汽车部件和标准汽车部件进行扫描,得到待检测图像和标准图像;
5、s2、分别对得到的待检测图像和标准图像进行预处理和轮廓提取,得到待检测轮廓曲线和标准轮廓曲线;
6、s3、基于曲线分段相似匹配算法对待检测轮廓曲线和标准轮廓曲线进行曲线相似度计算,并确定待检测轮廓曲线和标准轮廓曲线存在的差异;
7、s4、将待检测轮廓曲线和标准轮廓曲线之间存在的差异分割处理,并计算差异的大小;
8、s5、根据差异的大小对待检测汽车部件能否被修复进行判断,并将判断结果进行反馈。
9、优选的,所述分别对得到的待检测图像和标准图像进行预处理和轮廓提取,得到待检测轮廓曲线和标准轮廓曲线包括以下步骤:
10、s21、分别对待检测图像和标准图像进行图像去噪、图像滤波及图像增强处理;
11、s22、分别对处理后的待检测图像和标准图像进行边缘检测,并采用折线逼近法对检测的边缘进行拟合;
12、s23、基于格式塔完形规则中的闭合性分别对待检测图像和标准图像的拟合边缘进行度量,得到边缘间的闭合关系,并通过最小权值最优匹配算法对预设的代价函数进行求解,得到待检测图像和标准图像的闭合轮廓;
13、s24、采用b样条曲线法分别对待检测图像和标准图像的闭合轮廓进行平滑处理,得到待检测轮廓曲线和标准轮廓曲线。
14、优选的,所述基于格式塔完形规则中的闭合性分别对待检测图像和标准图像的拟合边缘进行度量,得到边缘间的闭合关系,并通过最小权值最优匹配算法对预设的代价函数进行求解,得到待检测图像和标准图像的闭合轮廓包括以下步骤:
15、s231、以格式塔完形规则中的闭合性作为判断目标,分别对待检测图像和标准图像的拟合边缘进行度量,判断拟合后的边缘线是否属于同一个轮廓,所述度量方式包括光滑性度量、急转性度量及遮挡引起的缺口度量;
16、s232、以轮廓中首尾相连的边缘之间属于同一个轮廓的概率最大为目标定义边界代价函数;
17、s233、利用最小权值最优匹配算法对定义的代价函数进行求解。
18、优选的,所述基于曲线分段相似匹配算法对待检测轮廓曲线和标准轮廓曲线进行曲线相似度计算,并确定待检测轮廓曲线和标准轮廓曲线存在的差异包括以下步骤:
19、s31、在待检测轮廓曲线和标准轮廓曲线中选择一个共同的参考点作为基准点,并分别将待检测轮廓曲线和标准轮廓曲线映射到二维坐标系中;
20、s32、根据视觉关键点分别对待检测轮廓曲线和标准轮廓曲线进行分段处理;
21、s33、根据选取的基准点,按照顺时针方向分别对待检测轮廓曲线和标准轮廓曲线上的所有分段进行特征提取,所述特征包括长度和角度;
22、s34、将每个分段提取的特征数值进行组合形成特征序列;
23、s35、根据提取的特征序列计算待检测轮廓曲线和标准轮廓曲线的相关性系数;
24、s36、根据计算得到的相关性系数判断待检测轮廓曲线和标准轮廓曲线是否存在差异。
25、优选的,所述根据视觉关键点分别对待检测轮廓曲线和标准轮廓曲线进行分段处理包括以下步骤:
26、s321、分别对待检测轮廓曲线和标准轮廓曲线上的每个点进行顶点域计算;
27、s322、根据每个点的顶点域,计算该点的曲率值;
28、s323、根据计算得到的曲率值,选取极大值点作为分段点。
29、优选的,所述根据提取的特征序列计算待检测轮廓曲线和标准轮廓曲线的相关性系数的计算公式为:
30、式中, r表示待检测轮廓曲线和标准轮廓曲线的相关性系数;
31、 t f和 k f分别表示待检测轮廓曲线特征序列和标准轮廓曲线特征序列的第 f个分段的特征值;
32、和分别表示待检测轮廓曲线特征序列和标准轮廓曲线特征序列的分段期望值。
33、优选的,所述将待检测轮廓曲线和标准轮廓曲线之间存在的差异分割处理,并计算差异的大小包括以下步骤:
34、s41、根据计算得到的相关性系数确定待检测轮廓曲线和标准轮廓曲线中存在差异的分段;
35、s42、将待检测轮廓曲线和标准轮廓曲线的差异分段进行分割,得到差异区域;
36、s43、根据差异区域在二维坐标系中的位置确定差异区域的长度和宽度;
37、s44、根据差异区域的长度和宽度确定矩形边界;
38、s45、利用蒙特卡洛方法对差异区域的面积进行计算,得到差异区域的面积大小。
39、优选的,所述利用蒙特卡洛方法对差异区域的面积进行计算,得到差异区域的面积大小包括以下步骤:
40、s451、利用均匀随机数发生器在确定的矩形边界内生产随机点;
41、s452、统计生成的随机点数量和落在差异区域内的数量;
42、s453、根据差异区域面积计算公式计算差异区域的面积。
43、优选的,所述根据差异的大小对待检测汽车部件能否被修复进行判断,并将判断结果进行反馈包括以下步骤:
44、s51、将待检测汽车部件与标准汽车部件之间的差异与预设的阈值进行比较判断;
45、s52、若差异值小于或等于预设的阈值,则表示待检测汽车部件是可修复的,若差异值大于预设的阈值,则表示待检测汽车部件是不可修复的;
46、s53、将判断的结果反馈至汽车部件检测人员。
47、根据本发明的另一个方面,提供了一种汽车部件快速智能检测系统,该智能检测系统包括:部件扫描模块、特征提取模块、相似度计算模块、差异计算模块及判断反馈模块;
48、所述部件扫描模块,用于通过3d扫描仪分别对待检测汽车部件和标准汽车部件进行扫描,得到待检测图像和标准图像;
49、所述特征提取模块,用于分别对得到的待检测图像和标准图像进行预处理和轮廓提取,得到待检测轮廓曲线和标准轮廓曲线;
50、所述相似度计算模块,用于基于曲线分段相似匹配算法对待检测轮廓曲线和标准轮廓曲线进行曲线相似度计算,并确定待检测轮廓曲线和标准轮廓曲线存在的差异;
51、所述差异计算模块,用于将待检测轮廓曲线和标准轮廓曲线之间存在的差异分割处理,并计算差异的大小;
52、所述判断反馈模块,用于根据差异的大小对待检测汽车部件能否被修复进行判断,并将判断结果进行反馈。
53、与现有技术相比,本发明提供了汽车部件快速智能检测方法及系统,具备以下有益效果:
54、(1)本发明通过使用3d扫描仪和曲线分段相似匹配算法,可以快速地对汽车部件进行检测,大大提高了检测效率,基于曲线分段相似匹配算法的检测方法可以准确地计算待检测轮廓曲线和标准轮廓曲线的相似度,从而提高检测的准确性,通过计算差异的大小,可以判断待检测汽车部件是否能够被修复;可以帮助生产线上的工作人员快速判断哪些缺陷可以修复,从而提高生产效率,降低生产成本。
55、(2)本发明对待检测图像和标准图像进行去噪、滤波和增强处理,可以提高图像的质量和清晰度,采用边缘检测算法对处理后的图像进行边缘检测,并采用折线逼近法对边缘进行拟合,从而更好地提取出图像的边缘信息,基于格式塔完形规则中的闭合性对拟合边缘进行度量,可以判断拟合后的边缘线是否属于同一个轮廓,从而准确地提取出待检测图像和标准图像的闭合轮廓,通过定义边界代价函数,并利用最小权值最优匹配算法对代价函数进行求解,可以准确地确定待检测图像和标准图像的闭合轮廓之间的对应关系,采用b样条曲线法对闭合轮廓进行平滑处理,可以进一步提高轮廓的精细度和光滑度。
56、(3)本发明通过计算待检测轮廓曲线和标准轮廓曲线上的每个点的顶点域和曲率值,可以选取极大值点作为分段点,从而提取出关键点,有助于后续相似度计算和差异分析,将待检测轮廓曲线和标准轮廓曲线分为多个段落,使得每个段落内的曲线具有较好的连续性和相似性,可以将曲线的相似度计算和差异分析分解为多个小段的计算,简化问题的复杂度,计算待检测轮廓曲线和标准轮廓曲线的相关性系数;通过相关性系数的计算,可以量化曲线之间的相似度,进一步判断曲线是否存在差异。
57、(4)本发明根据差异区域在二维坐标系中的位置,确定差异区域的长度和宽度,并利用蒙特卡洛方法对差异区域的面积进行计算,可以量化差异区域的大小,得到一个具体的数值,用于衡量待检测轮廓曲线和标准轮廓曲线之间的差异程度,根据差异区域面积计算公式计算差异区域的面积,蒙特卡洛方法可以通过随机采样的方式来估计差异区域的面积,具有较高的计算效率和准确性,有助于准确计算待检测轮廓曲线和标准轮廓曲线之间的差异大小。
- 还没有人留言评论。精彩留言会获得点赞!