一种基于一致性信息滤波的机动目标跟踪方法
本发明涉及目标跟踪技术,具体涉及一种基于一致性信息滤波的机动目标跟踪方法。
背景技术:
1、目标跟踪,本质上是凭借雷达、声纳、红外等传感器的量测信息估计目标位置、速度和加速度等状态信息,被广泛应用于军事和民用领域,如导弹制导、无人机侦查、无人驾驶等。传感器的量测信息通常从极/球坐标系中获得,而运动目标的状态方程通常建立在笛卡尔坐标系下,这就使得跟踪过程中目标量测与运动状态信息呈现高度非线性。针对这一问题,大部分文献采用扩展卡尔曼滤波(ekf),通过泰勒展开将量测方程近似线性化,但是泰勒展开式中被忽略的高阶项将会带来估计误差。与ekf不同,量测转换方法通直接利用坐标变换将量测信息转换到笛卡尔坐标系下。在此基础上,去偏量测转换方法、修正无偏量测转换方法相继被提出。同时,对于机动目标,其运动模式往往是未知且剧烈变化,可以在匀速、匀加速、匀减速、转弯等多种运动方式中不断发生变化。机动目标跟踪问题,难点在于通常所采用的滤波算法中采用的目标模型和机动目标实际模型不匹配,使得滤波发散,跟踪性能较差。
2、交互式多模型算法(imm)是目前使用最广泛的机动目标跟踪算法,其使用两个或两个以上模型对目标的运动状态进行描述,各模型之间的权重由马尔科夫概率转移矩阵确定。公开号为cn114966667a的中国专利公开了一种基于自适应无迹卡尔曼滤波的交互多模型室内定位方法,通过实时调整转移概率矩阵提高模型匹配度,并设计自适应扩大跟踪门提高数据互联的精确度,得到更优越的跟踪性能。公开号为cn107704432a的中国专利公开了一种转移概率自适应的交互多模型目标跟踪方法,采用双曲正弦反函数对状态转移矩阵进行修正,实现转移概率矩阵自适应,可以实现机动和非机动目标跟踪。以上两个中国专利都是基于单传感器框架下的方法,一定程度上解决了单模型滤波跟踪精度低问题,但是仅适用于单无人系统中,不适用于多无人协作系统。
3、随着无线传感器网络的发展,基于多传感器的目标跟踪方法越来越受到人们的关注,分为集中式跟踪方法和分布式方法。集中式跟踪方法需要所有节点将量测信息发送到同一个融合中心进行处理,再将处理后的数据发送给各个节点,通讯负担很大,且一旦融合中心遭受损坏,整个系统性能面临崩溃。分布式方法多采用一致性算法,且依据进行一致性处理的信息的不同可将其分为三类:估计的一致性(ci),直接对状态估计信息的进行一致性处理;量测的一致性(cm),对量测数据进行一致性处理;混合一致性,融合cm和ci。文献“tiany,chen z,yin f.distributed imm-unscented kalman filter for speakertracking in microphone array networks[j].ieee/acm transactions on audio,speech and language processing(taslp),2015,23(10):1637-1647.”将分布式无迹卡尔曼方法与imm模型结合,提出了一种基于imm模型的分布式点目标跟踪方法,在分布式估计环节中各节点基于相同的权重加权融合通过网络获取的其所有通信节点的量测信息,得到目标状态的一致性估计,该方法仅适用于所有节点都拥有充足的计算资源且网络通信环境较好状况。公开号为cn116415102a的中国专利公开了一种基于混合imm模型的分布式扩展目标跟踪方法,采用了模型切换策略,有效解决传感器网络中部分节点计算资源匮乏问题,但是该方法对网络通信要求较高。
技术实现思路
1、本发明的目的在于提供一种基于一致性信息滤波的机动目标跟踪方法。
2、实现本发明的目的技术解决方案为:一种基于一致性信息滤波的机动目标跟踪方法,包括以下步骤:
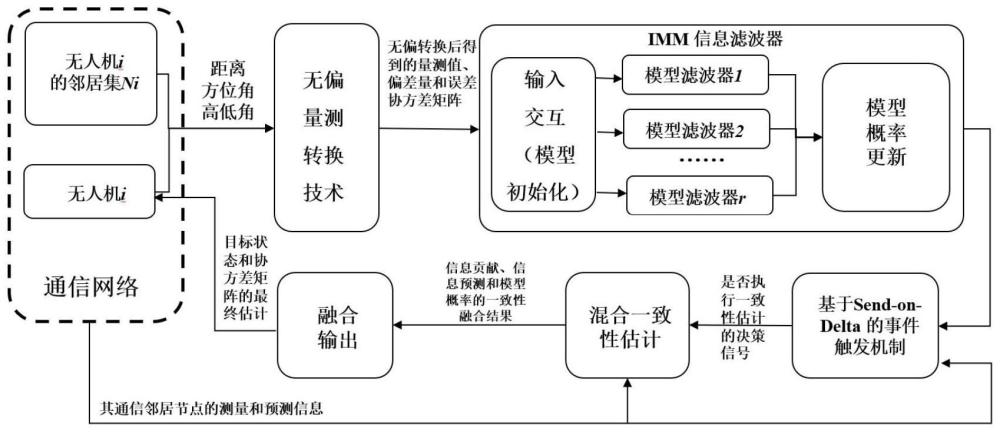
3、步骤1:采用雷达加红外传感器的方式采集空中强机动目标的相对运动状态数据,其中雷达传感器采集的相对运动状态数据包括径向距离,红外传感器采集的相对运动状态数据包括方位角和高低角,并通过无偏量测转换的方式,将传感器采集空中强机动目标的径向距离、方位角和高低角从球/极坐标系转换到笛卡尔坐标系,得到无偏的目标位置量测信息;
4、步骤2:根据空中强机动目标运动的复杂性和机动性,分析其可能运动形式数学模型,构建imm空中强机动目标运动模型集;
5、步骤3:对于每一个无人机节点,将每个模型相关的模型估计状态及协方差矩阵进行加权融合,得到空中强机动目标的状态及协方差矩阵交互输入值;
6、步骤4、计算每个无人机节点的每个模型的空中强机动目标状态估计预测值、协方差矩阵预测值,结合信息滤波算法将系统状态映射到信息空间,得到信息向量预测值、信息矩阵预测值;
7、步骤5、结合无偏转换后得到的目标位置量测信息,计算每个无人机节点的每个模型的信息向量贡献值和信息矩阵贡献值;
8、步骤6、根据每个无人机,以及与其通信无人机交互的模型信息向量贡献值、模型信息矩阵贡献值、模型信息向量预测值和模型信息矩阵预测值,进行混合一致性加权融合,更新每个无人机节点的每个模型的信息向量预测值、信息矩阵预测值;
9、步骤7、更新每个无人机节点的每个模型的空中强机动目标状态估计值、协方差矩阵值;
10、步骤8、计算imm空中强机动目标运动模型集中的各个模型的似然值,得到imm空中强机动目标运动模型集中每个模型描述的目标运动形式的准确程度,更新每个无人机对应不同模型的转移概率;
11、步骤9、加权融合每个无人机对应imm空中强机动目标运动模型集中每个模型的目标状态估计更新值、协方差矩阵更新值,输出空中强机动目标状态融合估计值及协方差矩阵融合估计值。
12、一种基于一致性信息滤波的机动目标跟踪系统,实施所述的基于一致性信息滤波的机动目标跟踪方法,实现基于一致性信息滤波的机动目标跟踪。
13、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实施所述的基于一致性信息滤波的机动目标跟踪方法,实现基于一致性信息滤波的机动目标跟踪。
14、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实施所述的基于一致性信息滤波的机动目标跟踪方法,实现基于一致性信息滤波的机动目标跟踪。
15、本发明与现有技术相比,其显著优点:(1)在解决跟踪过程中量测方程呈现高度非线性问题,公开号为cn114966667a和cn116415102a的中国专利采用ut转换的方式,无法完全消除量测转换带来的偏差,而本发明应用无偏量测技术,可以得到无偏的目标位置量测信息,有助于提升滤波精度;(2)在解决分布式状态估计问题,本发明采用信息滤波的方式,避免传统卡尔曼滤波框架下高维矩阵的逆运算操作,减少计算量,同时采用基于量测信息一致性和估计信息一致性相结合的混合一致性融合方式,减小一致性滤波迭代次数的同时获得更好的滤波精度;(3)在解决计算资源有限、通信网络受限下的滤波问题,公开号为cn116415102a的中国专利采用基于分布式框架的混合imm方法和模型切换策略,解决传感器网络中部分节点计算资源匮乏问题,但是该方法对网络通信要求较高,本发明采用事件触发方式,可以减少不必要的数据传输,减轻网络负担。
- 还没有人留言评论。精彩留言会获得点赞!