本发明属于人工肌肉型柔性驱动器领域的一种制备和性能测试装置,特别涉及一种伴随电阻丝的、由聚合物纤维卷绕加捻的人工肌肉制备及多环境性能测试装置和其方法。
背景技术:
1、近年来,具有高功率质量比和高度柔顺性的人工肌肉被广泛应用于仿生机器人、软体机器人等先进领域,但传统的柔性人工肌肉驱动方式如形状记忆合金丝、介电弹性体、气动网格驱动器等往往存在价格昂贵、驱动条件苛刻、外部设备要求高等缺陷。
2、2014年,美国科学家c.s.haines等人在《artificial muscles from fishingline and sewing thread》[j].(science,2014,343(6173):868-872)文章中提出了一种尼龙聚合物卷绕型人工肌肉,即tcpa(twisted and coiled polymer fiber artificialmuscles)。相比于传统人工肌肉,这种人工肌肉具有价格低廉、功率密度高、寿命长、输出线性度好、迟滞小、易于制成较大长度等优良特性,是软体机器人理想的驱动方式。
3、但tcpa的结构及驱动性能会受到制备流程的影响,并且随着机器人作业环境的多样化,人工肌肉在多环境中的作业能力也需要得到测定及评估,而目前缺少人工肌肉的参数化、标准化制作设备和包含室内空气环境及水下环境的多环境测试设备、方法,这大大限制了tcpa的性能优化和进一步在机器人领域的应用。
4、专利cn114481381b公开了一种聚合物纤维人工肌肉连续自动加捻收卷装置及方法,该装置通过多电机的协调运行实现聚合物纤维的连续加捻收卷,通过力矩电机实现张力调节。但该装置无法实现纤维加捻过程中的参数化记录,且缺少针对聚合物纤维人工肌肉的热定型处理手段,无法实现聚合物纤维卷绕型人工肌肉的全流程自动化、参数化生产。
5、专利cn112285445b公开了一种变刚度双模式输出的人工肌肉的测试装置和方法,该装置以碳纳米管纤维人工肌肉和导电尼龙纤维人工肌肉为对象,由力传感器和位移传感器分别实现电化学、电热驱动下的变刚度性能测试。但该装置只能实现室内环境下的人工肌肉测试,所用传感方法无法测试人工肌肉在水下的驱动性能。
技术实现思路
1、本发明旨在实现伴随电阻丝的聚合物卷绕型人工肌肉的高效参数化制作、多环境性能测试一体化,为不同环境作业的机器人提供可靠的动力源。
2、为了实现上述目的,针对现有聚合物纤维卷绕型人工肌肉制备及测试技术的缺陷,本发明提出一种人工肌肉快速参数化加捻制备和多环境热驱动特性测试装置、方法,该装置包括主控动力模块、人工肌肉制备-测试模块、水下测试组件。所述人工肌肉一般由尼龙纤维丝制备且伴随缠绕有电阻丝;所述主控动力模块安装在铝型材框架上端;所述人工肌肉制备-测试模块可实现等张测试及等长测试两种构型转换,等张测试下可实现沿滑杆轴向的移动,等长测试下则固定其在轴向的位置;所述水下测试部分安装在铝型材框架下端,通过内部高刚度引导线传递人工肌肉的力、位输出;所述主体框架部分由铝型材组成,大部分主要结构件由3d打印制成。
3、本发明的技术方案如下:
4、一、一种卷绕型人工肌肉制备及多环境性能测试装置
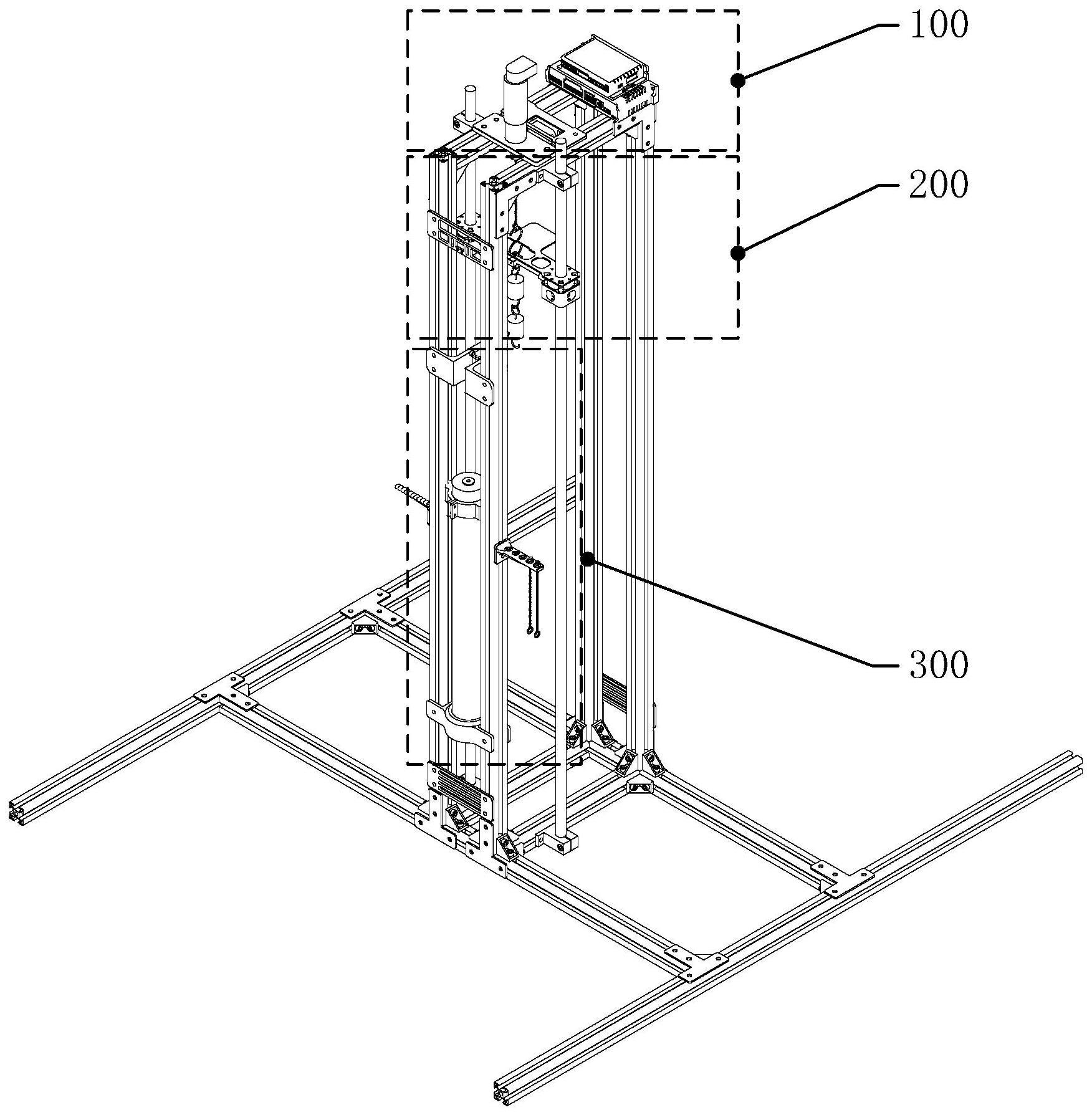
5、卷绕型人工肌肉制备及多环境性能测试装置包括主控动力模块、人工肌肉制备-测试模块、水下测试组件和安装框架;人工肌肉制备-测试模块安装在安装框架的上部,水下测试组件安装在安装框架的下部,水下测试组件与人工肌肉制备-测试模块连接,主控动力模块与水下测试组件、人工肌肉制备-测试模块均相连,人工肌肉制备-测试模块用于制备和测试人工肌肉,水下测试组件用于在水下环境中测试人工肌肉。
6、所述主控动力模块包括伺服电机、主控电路板和激光位置传感器;伺服电机固定安装在安装框架上,伺服电机的输出轴与安装在人工肌肉制备-测试模块中的人工肌肉相连,主控电路板与伺服电机和激光位置传感器相连,激光位置传感器用于测量人工肌肉的长度。
7、所述人工肌肉制备-测试模块包括激光位置传感器标定板、滑块、热成像传感器组件、滑杆和预加载负重;滑杆固定安装在安装框架中,激光位置传感器标定板通过滑块与滑杆相连;人工肌肉的上端与主控动力模块相连,人工肌肉的下端设置有预加载负重并且人工肌肉的下端与激光位置传感器标定板固定连接,激光位置传感器标定板还与水下测试组件相连,热成像传感器组件安装在安装框架中,用于测量人工肌肉的热信号。
8、所述水下测试组件包括引导线转向组件、水箱主体和引导线;水箱主体固定安装在安装框架的下部,引导线转向组件固定安装在水箱主体上的安装框架中,水下待测人工肌肉设置在水箱主体内并且水下待测人工肌肉的下端与水箱主体的底部固定连接,水下待测人工肌肉的上端与引导线的一端相连,引导线的另一端向上穿出水箱主体后再通过引导线转向组件后与人工肌肉制备-测试模块固定连接。
9、二、一种卷绕型人工肌肉制备及多环境性能测试装置的人工肌肉制备方法
10、激光位置传感器标定板设置为沿着滑杆进行上下滑动,人工肌肉下端与预设的预加载负重相连,利用激光位置传感器测量人工肌肉的初始长度,驱动伺服电机卷绕人工肌肉,完成卷绕后记录人工肌肉的加工后长度,接着对卷绕后的人工肌肉热处理后,取下完成热处理的人工肌肉并作为成品人工肌肉。
11、三、一种卷绕型人工肌肉制备及多环境性能测试装置的人工肌肉等张测试方法
12、在人工肌肉制备-测试模块和\或水下测试组件中安装成品人工肌肉,激光位置传感器标定板设置为沿着滑杆进行上下滑动,设置成品人工肌肉的驱动温度和加载应力,改变成品人工肌肉的驱动功率,记录成品人工肌肉的长度以及记录成品人工肌肉的温度,实现人工肌肉的等张测试。
13、所述水下测试组件中通过电阻丝自感知方式记录水环境中成品人工肌肉的温度变化。
14、四、一种卷绕型人工肌肉制备及多环境性能测试装置的人工肌肉等长测试方法
15、在人工肌肉制备-测试模块和\或水下测试组件中安装成品人工肌肉,成品人工肌肉或引导线的端部通过拉压力传感器与激光位置传感器标定板固定连接,激光位置传感器标定板固定在滑杆中,设置成品人工肌肉的驱动温度和肌肉长度,改变成品人工肌肉的驱动功率,记录成品人工肌肉的输出力以及记录成品人工肌肉的温度,实现人工肌肉的等长测试。
16、所述水下测试组件中通过电阻丝自感知方式记录水环境中成品人工肌肉的温度变化。
17、本发明的有益效果为:
18、本发明将聚合物卷绕型人工肌肉的制作设备与性能测试设备结合,通过对各种关键设备的复用,可节约空间,降低设备冗余,实现聚合物卷绕型人工肌肉的参数化制作、多环境测试一体化。
19、在聚合物卷绕型人工肌肉的制作方面,相比现有的制作设备及方法,本设备采用独立的高精度传感设备实现人工肌肉制作过程中关键参数的准确记录,且通过编码器对加捻圈数的记录及联合电机闭环控制,实现人工肌肉的快速参数化制作。
20、在聚合物卷绕型人工肌肉的测试方面,相比现有的测试设备及方法,本设备可实现室内环境及水下环境等作业介质内的驱动特性测试,完成多环境下的等张实验及等长实验,为潜在作业环境中的人工肌肉性能测试提供方法。特别地面向水下作业环境,本发明优化现有测温手段,针对伴随电阻丝的聚合物卷绕型人工肌肉提出自感知温度测定方法,解决现有传感器无法实现水下环境人工肌肉温度测定的问题,为评估及优化人工肌肉水下作业能力提供有效手段。