本公开涉及激光雷达,具体而言,涉及一种激光雷达。
背景技术:
1、激光雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号,然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。激光雷达现在广泛部署在包括自动车辆在内的不同的场景中。激光雷达可以在扫描场景时主动估计到环境特征的距离及速度,并生成指示环境场景的三维形状的点位置云。激光雷达是广泛用于自动驾驶场景中的核心传感器之一,可以用于收集外部环境的三维信息。激光雷达按照探测机制,主要可以分成飞行时间(time of flight,tof)和调频连续波(frequency modulated continuouswave,fmcw)这两种激光雷达。
技术实现思路
1、本公开一些实施例提供一种激光雷达,所述激光雷达包括:
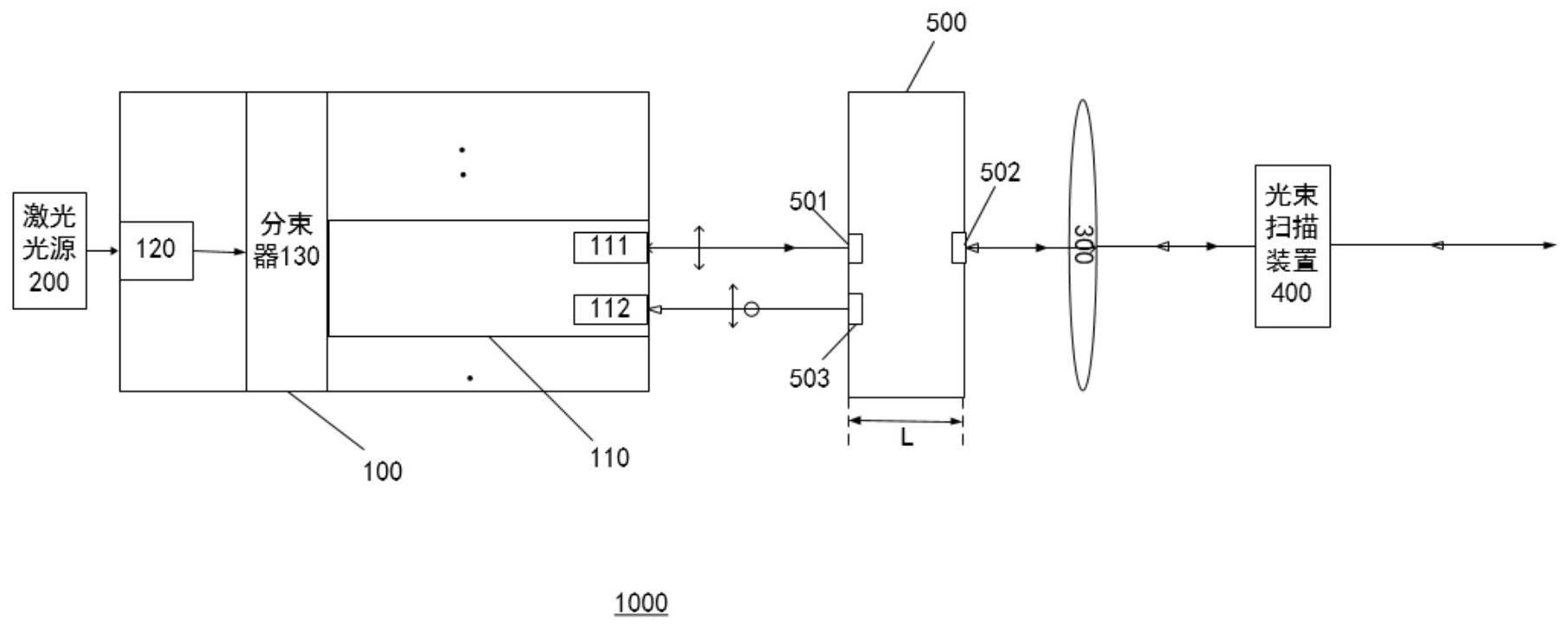
2、激光雷达芯片,所述激光雷达芯片上包括至少一个激光传输探测通道,配置为传输具有第一偏振状态的探测光束以及具有第一偏振状态的本振光束,所述激光传输探测通道包括:
3、光发射端,配置为发射所述探测光束,所述探测光束遇到障碍物后分别反射产生反射光束,所述反射光束包括具有第一偏振状态的第一子反射光束和具有第二偏振状态的第二子反射光束;
4、光接收端,配置为接收所述第一子反射光束和第二子反射光束中的至少一者;
5、混频器,接收所述本振光束以及所述反射光束,并对所述本振光束及所述反射光束执行混频操作输出混频光束;以及
6、检测器,配置为接收所述混频光束并输出探测电信号,
7、所述激光雷达根据所述探测电信号测定所述障碍物的距离和/或速度。
8、在一些实施例中,所述激光雷达还包括:
9、透镜组件,配置为对所述光发射端出射的探测光束执行准直并偏转,以及对所述反射光束执行聚焦以耦合进入所述激光传输探测通道;以及
10、光束扫描装置,设置在所述透镜组件靠近所述障碍物一侧,配置为随着时间调整来自所述光发射端出射的探测光束的出射方向以实现光束扫描。
11、在一些实施例中,所述激光雷达还包括环形器,设置在所述激光雷达芯片与所述透镜组件之间,所述环形器包括:
12、第一端口,配置为接收所述探测光束;
13、第二端口,配置为向所述透镜组件出射所述探测光束并接收所述反射光束;以及
14、第三端口,配置为向所述激光传输探测通道出射所述反射光束,使得所述第一子反射光束和第二子反射光束共轴耦合进入所述光接收端。
15、在一些实施例中,所述激光传输探测通道还包括:
16、偏振旋转器,配置为接收所述本振光束,并将所述本振光束转换为具有第一偏振状态的第一子本振光束以及具有第二偏振状态的第二子本振光束,
17、所述混频器配置为接收所述第一子本振光束以及所述第一子反射光束,并对所述第一子本振光束及所述第一子反射光束执行混频操作输出第一子混频光束;以及接收所述第二子本振光束以及所述第二子反射光束,并对所述第二子本振光束及所述第二子反射光束执行混频操作输出第二子混频光束,
18、所述检测器配置为接收所述第一子混频光束并输出第一子探测电信号,以及接收所述第二子混频光束并输出第二子探测电信号,
19、所述激光雷达根据所述第一子探测电信号以及第二子探测电信号测定所述障碍物的距离和/或速度。
20、在一些实施例中,所述激光雷达芯片还包括:
21、接收端口,配置为接收激光;以及
22、分光器,配置为将所述激光分束为所述探测激光以及本振激光,所述探测激光及本振激光配置为传输至所述激光传输探测通道。
23、在一些实施例中,所述激光雷达还包括偏振传输分束装置,设置在所述激光雷达芯片与所述透镜组件之间,所述偏振传输分束装置配置为:
24、允许输所述探测光束保持原方向通过;
25、平移偏置反射光束中的第一子反射光束使得所述第一子反射光束入射至所述光接收端;以及
26、允许反射光束中第二子反射光束保持原方向通过使得所述第二子反射光束中入射至所述光发射端,所述光发射端共轴收发所述探测光束以及所述第二子反射光束。
27、在一些实施例中,所述本振光束包括第一本振光束和第二本振光束,
28、所述混频器包括第一混频器和第二混频器,分别设置在所述检测器两侧,所述第一混频器配置为接收所述第一本振光束以及所述第一子反射光束,并对所述第一本振光束及所述第一子反射光束执行混频操作输出第一混频光束;所述第二混频器配置接收所述第二本振光束以及所述第二子反射光束,并对所述第二本振光束及所述第二子反射光束执行混频操作输出第二混频光束,
29、所述检测器配置为接收所述第一混频光束并输出第一探测电信号,以及接收所述第二混频光束并输出第二探测电信号,
30、所述激光雷达根据所述第一探测电信号以及第二探测电信号测定所述障碍物的距离和/或速度。
31、在一些实施例中,所述激光传输探测通道包括:
32、偏振旋转分束器,配置为接收所述第二子反射光束,将所述第二子反射光束的偏振状态由第二偏振状态改为第一偏振状态,并传输偏振状态更换后的第二子反射光束至所述第二混频器。
33、在一些实施例中,偏振传输分束装置包括依次远离所述激光雷达芯片设置的法拉第旋光器、半波片以及偏振光束偏置器,
34、所述探测光束依次经过所述法拉第旋光器及半波片后由第一偏振状态偏振光转换为第二偏振状态偏振光,第二偏振状态偏振光保持原方向通过所述偏振光束偏置器后依次经过所述透镜组件、光束扫描装置到达所述障碍物形成所述反射光束,所述反射光束沿原光路返回至所述偏振光束偏置器,所述反射光束中的具有第二偏振状态的第二子反射光束保持原方向通过所述偏振光束偏置器后依次经过所述半波片及法拉第旋光器,进而入射至所述光发射端,反射光束中的具有第一偏振状态的第一子反射光束经过所述偏振光束偏置器平移偏置后依次经过所述半波片及法拉第旋光器,进而入射至所述光接收端。
35、在一些实施例中,所述激光雷达芯片还包括:
36、接收端口,配置为接收激光;以及
37、分光器,配置为将所述激光分束为所述探测激光、第一本振激光以及第二本振激光,所述探测激光、第一本振激光以及第二本振激光配置为传输至所述激光传输探测通道。
38、本公开实施例的上述方案与相关技术相比,至少具有以下有益效果:
39、激光雷达通过传输探测通道发射具有第一偏振状态的探测光束并接收包括具有第一偏振状态的第一子反射光束和具有第二偏振状态的第二子反射光束的反射光束,充分利用反射光束来进行障碍物的测定,提高探测概率。同时避免了由于物体反射光束中tm模式偏振光较弱、te模式偏振光较强而无法探测物体的情况。