一种光热联合的弃渣场颗粒辨识与性能评价方法与流程
本发明属于弃渣场颗粒识别与评价,具体涉及一种光热联合的弃渣场颗粒辨识与性能评价方法。
背景技术:
1、弃渣场作为工程建设的人工松散堆积体,相较于自然斜坡,具有非饱和、欠固结、多孔隙的特点。在工程的修建过程中,无法避免会产生许多弃渣场。
2、由于弃渣场场地地质条件、弃渣场所堆置岩土物理力学性质、弃渣场设计参数、堆置工艺等因素的影响,弃渣场边坡可能会产生崩滑泥等灾害,导致严重的弃渣场安全稳定性及次生灾害问题,对下游已有构筑物和人民生命财产构成巨大的威胁。
3、弃渣料来源于工程挖方或爆破,相比天然碎石土边坡,自身的颗粒级配相对较差,而在自然抛落过程中存在一定的重力分选,并且缺乏相对的固结时间。造成弃渣场堆积体粒度不均匀,内部结构不稳定。基于渣体颗粒的几何和分布特征,可以得到渣体的物理、力学、渗透能力等特性。统计分析弃渣场颗粒的几何和分布特征,对了解渣体的物理、力学、渗透能力等特性具有重要意义,同时可以为弃渣场稳定性分析、防治加固等提供科学参数。
4、目前对于颗粒分析的常用方法为筛分法,但筛分法通常适用于粒径小于2cm的颗粒,对于较大的渣体颗粒不适用。并且弃渣场面积较大,使用筛分法进行分析效率较低,不利于工程的推进。现有的弃渣颗粒参数获取方法效率低,安全性差,探测效果不理想。
技术实现思路
1、本发明提供了一种光热联合的弃渣场颗粒辨识与性能评价方法,解决了现有的弃渣场渣体颗粒参数获取方法效率低、安全性差以及探测效果不理想的问题。
2、为了解决上述技术问题,本发明的技术方案为:一种光热联合的弃渣场颗粒辨识与性能评价方法,包括以下步骤:
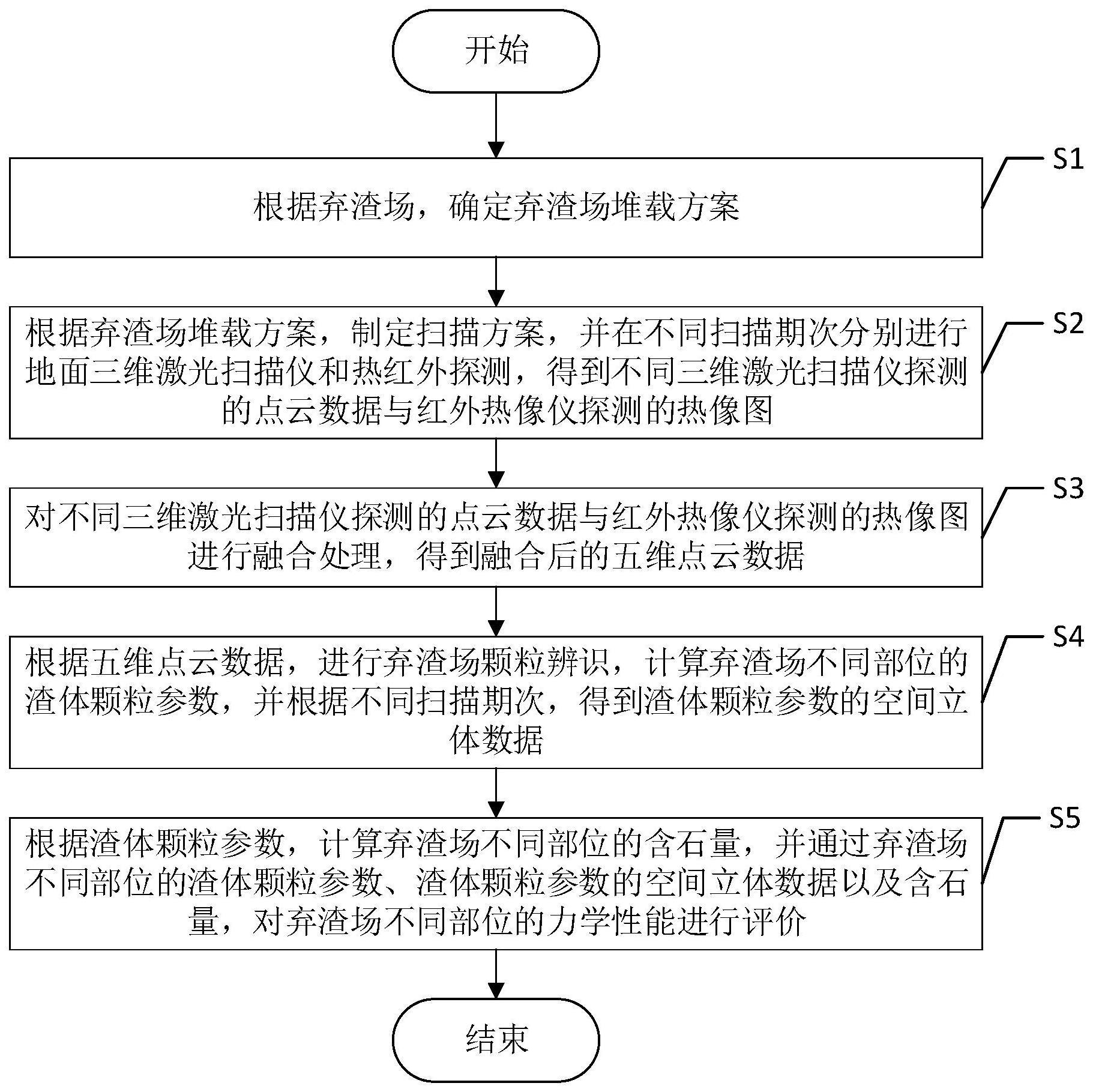
3、s1、根据弃渣场,确定弃渣场堆载方案;
4、s2、根据弃渣场堆载方案,制定扫描方案,并在不同扫描期次分别进行地面三维激光扫描仪和热红外探测,得到不同三维激光扫描仪探测的点云数据与红外热像仪探测的热像图;
5、s3、对不同三维激光扫描仪探测的点云数据与红外热像仪探测的热像图进行融合处理,得到融合后的五维点云数据;
6、s4、根据五维点云数据,进行弃渣场颗粒辨识,计算弃渣场不同部位的渣体颗粒参数,并根据不同扫描期次,得到渣体颗粒参数的空间立体数据;
7、s5、根据渣体颗粒参数,计算弃渣场不同部位的含石量,并通过弃渣场不同部位的渣体颗粒参数、渣体颗粒参数的空间立体数据以及含石量,对弃渣场不同部位的力学性能进行评价。
8、本发明的有益效果是:本发明通过地面三维激光扫描仪和红外热像仪结合对弃渣颗粒辨识,确定弃渣场不同部位堆积颗粒的参数,并根据颗粒参数计算弃渣场不同部位的力学性能,从而快速获得渣体颗粒的数量、颗粒半径、颗粒的均匀系数、颗粒的曲率系数、颗粒针度、颗粒的扁平程度、颗粒球度、颗粒岩性以及孔隙度等信息。所获取的五维点云信息,兼具激光扫描得到点云空间位置的高精度,并融合了反射强度点云信息和温度点云信息。这种方法相比传统方法更加快捷、高效、安全、覆盖范围广,并且可以记录弃渣场内部结构特征,对弃渣场颗粒的物理力学性质进行研究,为合理评估弃渣场边坡的稳定性和变形提供了技术支持,解决了现有的弃渣场渣体颗粒参数获取方法效率低、安全性差以及探测效果不理想的问题。
9、进一步地,所述步骤s3的具体步骤为:
10、s31、将不同三维激光扫描仪探测的点云数据进行数据拼接、坐标系统转换以及植被噪音点剔除操作,得到带有位置和反射强度信息的点云数据(x,y,z,r'),其中,x表示在三维空间坐标系中横轴上的位置,y表示在三维空间坐标系中纵轴上的位置,z表示在三维空间坐标系中竖轴上的位置,r'表示点云数据的反射强度灰度信息;
11、s32、基于三维重建算法sfm,将不同角度获取的多个2维热像图生成热像点云数据;
12、s33、通过点云配准算法,将带有位置和反射强度信息的点云数据(x,y,z,r')与带有温度信息的热像点云数据进行融合,并将以rgb形式表示的温度信息,转换为温度灰度信息,得到融合后的五维点云数据(x,y,z,r',t),其中,t表示融合后的点云数据的温度灰度信息。
13、上述进一步方案的有益效果为:通过点云配准算法,将带有位置和反射强度信息的点云数据与热像点云数据进行融合,融合后的点云数据带有位置信息、点云强度以及温度信息,能够用于后续参数提取以及颗粒辨别。
14、进一步地,所述步骤s33中融合后的点云数据的温度灰度信息的计算公式为:
15、t=0.299*r+0.587*g+0.114*b
16、其中,r、g和b分别表示带有温度信息的热像点云数据对应的红、绿和蓝色颜色通道的色彩值。
17、进一步地,所述步骤s4的具体步骤为:
18、s41、根据五维点云数据(x,y,z,r',t)中的空间信息,采用爬山算法和区域生长算法辨识渣体颗粒,并利用五维点云数据(x,y,z,r',t)中的温度灰度信息进行校正,得到分离的渣体颗粒;
19、s42、根据分离的渣体颗粒,计算弃渣场不同部位的渣体颗粒参数,包括颗粒数量、颗粒半径、颗粒的均匀系数、颗粒的曲率系数、颗粒针度、颗粒的扁平程度、颗粒球度、颗粒岩性以及孔隙度;
20、s43、根据不同扫描期次的扫描数据,计算弃渣场不同部位的渣体颗粒参数的空间立体数据,得到颗粒立体空间孔隙度。
21、上述进一步方案的有益效果为:使用爬山算法能够局部择优,避免遍历,提高效率以及利用反馈信息生成解的决策,计算简单便于实现,效率高。而使用区域生长算法通常能将具有相同特征的联通区域分割出来,通过温度数据校准能提供很好的边界信息和分割结果,提高了渣体颗粒辨识的精度。
22、进一步地,所述步骤s42中颗粒的均匀系数cu的计算公式为:
23、
24、其中,d60表示累积粒度分布百分数达到60%所对应的颗粒半径,d10表示累积粒度分布百分数达到10%所对应的颗粒半径;
25、所述步骤s42中颗粒的曲率系数cc的计算公式为:
26、
27、其中,d30表示累积粒度分布百分数达到30%所对应的颗粒半径,d60表示累积粒度分布百分数达到60%所对应的颗粒半径;
28、所述步骤s42中颗粒针度e的计算公式为:
29、
30、其中,l表示颗粒的长轴尺寸,i表示颗粒的次长轴尺寸;
31、所述步骤s42中颗粒的扁平程度f的计算公式为:
32、
33、其中,s表示颗粒的短轴尺寸,i表示颗粒的次长轴尺寸;
34、所述步骤s42中颗粒球度ψ的计算公式为:
35、
36、其中,lbox表示颗粒最小外接长方体的长,wbox表示颗粒最小外接长方体的宽,hbox表示颗粒最小外接长方体的高;
37、所述步骤s42中颗粒岩性的表达式为:
38、岩性rn:rgn≤rgln≤rgn+1
39、其中,rgn和rgn+1分别为岩性rn的强度灰度阈值rgln的下限和上限;
40、所述步骤s42中颗粒孔隙度p的计算公式为:
41、
42、
43、其中,ap表示颗粒点云所占面积,a表示总面积,ntp表示大于一定温度阈值t'的点云数量,ρ表示点云密度。
44、进一步地,所述步骤s43中弃渣场不同部位的渣体颗粒参数的空间立体数据为不同扫描期次的渣体颗粒参数的平均值。
45、进一步地,所述颗粒立体空间孔隙度pn'表示的计算公式为:
46、
47、其中,n'表示扫描期次,pi表示第i个扫描期次的颗粒孔隙度。
48、进一步地,,所述步骤s5中含石量的计算公式为:
49、
50、其中,sc表示估算含石量,m表示识别出的颗粒半径大于5mm的点云数量,n表示扫描区域内的点云总数量。
51、上述进一步方案的有益效果为:通过含石量的计算可以研究弃渣场的洞渣抗剪强度,便于研究弃渣场内部结构特征,对弃渣体颗粒的物理力学性质研究,为合理评估弃渣场边坡的稳定性和变形提供了技术支持。
- 还没有人留言评论。精彩留言会获得点赞!