设备定位方法、装置、电子设备和存储介质与流程
本发明涉及无线通信,尤其涉及一种设备定位方法、装置、电子设备和存储介质。
背景技术:
1、目前,定位技术主要使用卫星阵列与地面接收机的通信进行定位,通过解析获取目标的位置信息。当前,成熟的定位体系有gps(global positioning system,全球定位系统)、bds(beidou navigation satellite system,北斗卫星导航系统)等。
2、然而,目前在据此进行定位时,相较于室外环境的空旷无遮挡,室内环境则更加复杂多变,区域的狭小以及物品的众多极易造成室内区域无法被卫星信号全覆盖,因而在遮蔽的区域无法获取到卫星信号,从而无法满足室内定位的需求。另外,当设备本身处于运动状态时,依据目前的定位技术进行定位的误差较大。
技术实现思路
1、本发明提供一种设备定位方法、装置、电子设备和存储介质,用以解决现有技术中定位方法无法满足室内定位的需求,以及对于设备处于运动状态下,定位误差大的缺陷,实现各个场景下高精度的定位。
2、本发明提供一种设备定位方法,包括:
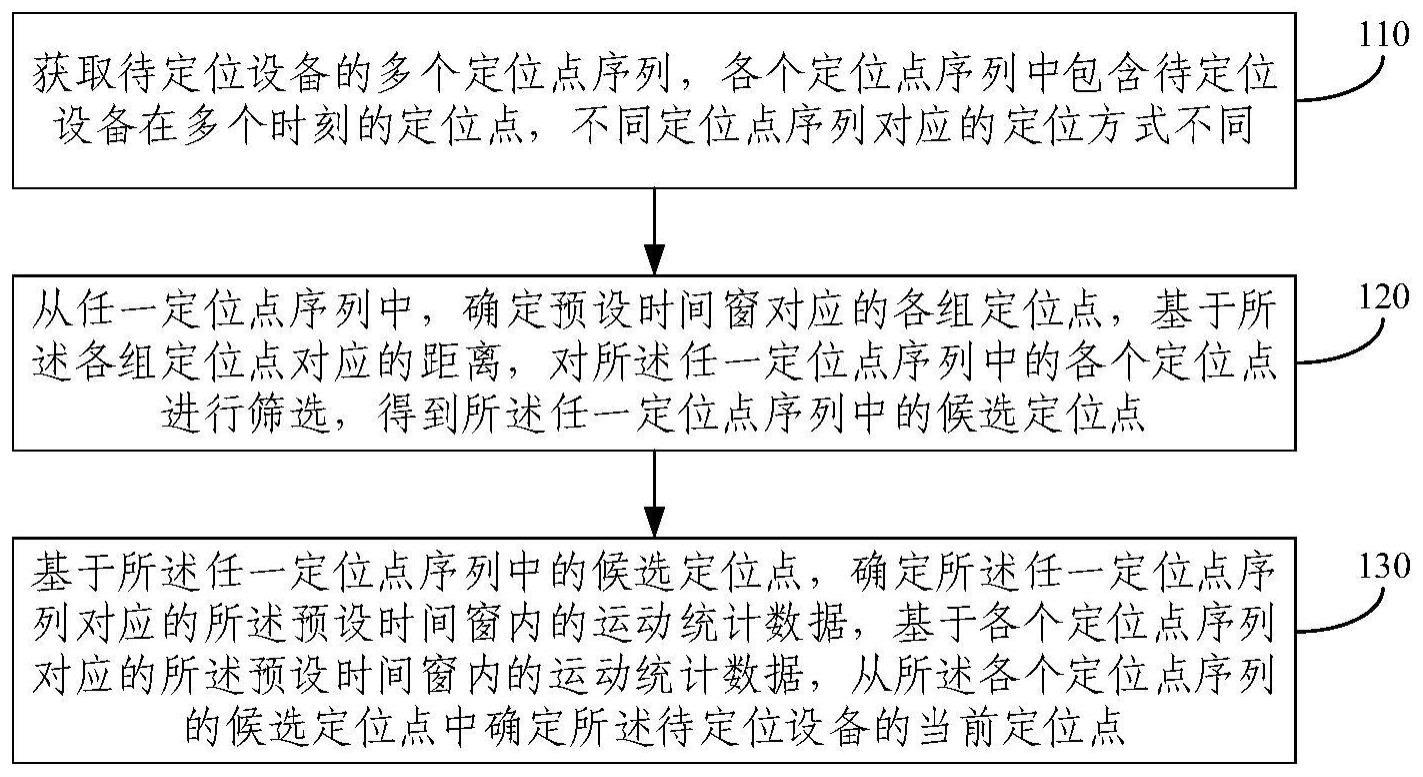
3、获取待定位设备的多个定位点序列,各个定位点序列中包含待定位设备在多个时刻的定位点,不同定位点序列对应的定位方式不同;
4、从任一定位点序列中,确定预设时间窗对应的各组定位点,基于所述各组定位点对应的距离,对所述任一定位点序列中的各个定位点进行筛选,得到所述任一定位点序列中的候选定位点;
5、基于所述任一定位点序列中的候选定位点,确定所述任一定位点序列对应的所述预设时间窗内的运动统计数据,基于各个定位点序列对应的所述预设时间窗内的运动统计数据,从所述各个定位点序列的候选定位点中确定所述待定位设备的当前定位点。
6、根据本发明提供的一种设备定位方法,所述基于各个定位点序列对应的所述预设时间窗内的运动统计数据,从所述各个定位点序列的候选定位点中确定所述待定位设备的当前定位点,包括:
7、基于所述各个定位点序列对应的所述预设时间窗内的运动统计数据,确定所述待定位设备在所述预设时间窗内的设备运动数据;
8、基于所述运动统计数据和所述设备运动数据,从所述各个定位点序列中确定目标定位点序列;
9、基于所述目标定位点序列中最近时刻的候选定位点,确定所述待定位设备的当前定位点。
10、根据本发明提供的一种设备定位方法,所述运动统计数据和所述设备运动数据均包括平均距离和/或平均速度;
11、所述基于所述运动统计数据和所述设备运动数据,从所述各个定位点序列中确定目标定位点序列,包括:
12、确定距离差异度和/或速度差异度,所述距离差异度基于对应定位点序列对应的平均距离与所述待定位设备对应的平均距离之间的差值确定,所述速度差异度基于对应定位点序列对应的平均速度与所述待定位设备对应的平均速度之间的差值确定;
13、基于所述距离差异度,和/或所述速度差异度,从所述各个定位点序列中确定目标定位点序列。
14、根据本发明提供的一种设备定位方法,所述运动统计数据和所述设备运动数据均包括平均距离和/或平均速度;
15、所述基于所述各个定位点序列对应的所述预设时间窗内的运动统计数据,确定所述待定位设备在所述预设时间窗内的设备运动数据,包括:
16、确定所述各个定位点序列中候选定位点的数目;
17、基于所述各个定位点序列中候选定位点的数目,确定所述各个定位点序列的权重;
18、基于所述各个定位点序列的权重,对所述各个定位点序列对应的平均距离和/或平均速度进行加权求和,得到所述待定位设备对应的平均距离和/或平均速度。
19、根据本发明提供的一种设备定位方法,所述基于所述各组定位点对应的距离,对所述任一定位点序列中的各个定位点进行筛选,得到所述任一定位点序列中的候选定位点,包括:
20、基于所述各组定位点对应的距离,确定所述各组定位点对应的速度;
21、基于所述各组定位点对应的距离和/或速度,对所述任一定位点序列中的各个定位点进行筛选,得到所述任一定位点序列中的候选定位点。
22、根据本发明提供的一种设备定位方法,所述基于所述各组定位点对应的距离和/或速度,对所述任一定位点序列中的各个定位点进行筛选,得到所述任一定位点序列中的候选定位点,包括:
23、基于所述各组定位点对应的距离和/或速度,从所述各组定位点中筛除第一定位点,得到所述任一定位点序列中的候选定位点;
24、所述第一定位点为按照所述距离和/或所述速度从小到大或从大到小的顺序排列时,前预设数量个以及后预设数量个所述距离和/或所述速度对应的定位点。
25、根据本发明提供的一种设备定位方法,所述基于所述各组定位点对应的距离和/或速度,对所述任一定位点序列中的各个定位点进行筛选,得到所述任一定位点序列中的候选定位点,包括:
26、基于所述各组定位点对应的距离和/或速度进行聚类,并基于聚类所得的距离区间和/或速度区间,从所述各组定位点中筛除第二定位点,得到所述任一定位点序列中的候选定位点;
27、所述第二定位点为对应的所述距离和/或所述速度未处于所述距离区间和/或所述速度区间的定位点。
28、本发明还提供一种设备定位装置,包括:
29、获取单元,用于获取待定位设备的多个定位点序列,各个定位点序列中包含待定位设备在多个时刻的定位点,不同定位点序列对应的定位方式不同;
30、筛选单元,用于从任一定位点序列中,确定预设时间窗对应的各组定位点,基于所述各组定位点对应的距离,对所述任一定位点序列中的各个定位点进行筛选,得到所述任一定位点序列中的候选定位点;
31、定位单元,用于基于所述任一定位点序列中的候选定位点,确定所述任一定位点序列对应的所述预设时间窗内的运动统计数据,基于各个定位点序列对应的所述预设时间窗内的运动统计数据,从所述各个定位点序列的候选定位点中确定所述待定位设备的当前定位点。
32、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,以及与所述处理器连接的定位模块;
33、所述定位模块用于对所述电子设备进行定位,得到多个定位点序列并传输至所述处理器,所述处理器接收所述多个定位点序列并执行所述程序以实现如上述任一项所述的设备定位方法。
34、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的设备定位方法。
35、本发明提供的设备定位方法、装置、电子设备和存储介质,获取通过多种定位技术定位得到的多个定位点序列,通过每一定位点序列中预设时间窗对应的各组定位点对应的距离进行异常定位点筛除,保证了定位点的有效性和准确性,通过每一定位点序列中的候选定位点确定预设时间窗内的运动统计数据,结合多个定位点序列对应的预设时间窗内的运动统计数据进行设备定位,以获取到设备的当前定位点,能够在极大程度上提高定位精度,保证定位结果的准确性和可靠性,克服了目前定位技术定位误差大,定位效果不佳,无法满足室内定位需求的缺陷,实现了多种场景下高精度、高准确性和可靠性的定位。
- 还没有人留言评论。精彩留言会获得点赞!